
Homework Answers



Add Answer to:
H(s) where: 6619) = * G6-ss 6) = 32 – 0.3s +10. HG) =s+3 Determine: a....
2. For the feedback system shown below: X 1 K s+3 S s+10 XX ) ....
 2. For the feedback system shown below: X 1 K s+3 S s+10 XX ) . - a Find the open loep gain. G6) k b. Find the closed foop galn S410 (EnXey& ke -3 . Find the open loop poles c. d. Find the epen loop zeros . Find K that makes 4 one of the closed loop poles. (h+5) Scanned by CamScanne
2. For the feedback system shown below: X 1 K s+3 S s+10 XX ) . - a Find the open loep gain. G6) k b. Find the closed foop galn S410 (EnXey& ke -3 . Find the open loop poles c. d. Find the epen loop zeros . Find K that makes 4 one of the closed loop poles. (h+5) Scanned by CamScanne
66. The system shown in Figure P6.16 has G (s) = 1/s(s+2) (s + 4). Find...
 66. The system shown in Figure P6.16 has G (s) = 1/s(s+2) (s + 4). Find the following: R(s) + E() K G,G) KES FIGURE P6.16 a. The value of K, for which the inner loop will have two equal negative real poles and the associated range of K, for system stability. b. The value of K, at which the system oscillates and the associated frequency of oscillation. c. The gain Ki at which a real closed-loop pole is at...
66. The system shown in Figure P6.16 has G (s) = 1/s(s+2) (s + 4). Find the following: R(s) + E() K G,G) KES FIGURE P6.16 a. The value of K, for which the inner loop will have two equal negative real poles and the associated range of K, for system stability. b. The value of K, at which the system oscillates and the associated frequency of oscillation. c. The gain Ki at which a real closed-loop pole is at...
Theroot-locus design method (d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angle...
 Theroot-locus design method
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angles. the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, respectively, and the range of k for closed-loop stability 5 10ん k(s+21
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root...
Theroot-locus design method
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angles. the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, respectively, and the range of k for closed-loop stability 5 10ん k(s+21
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root...
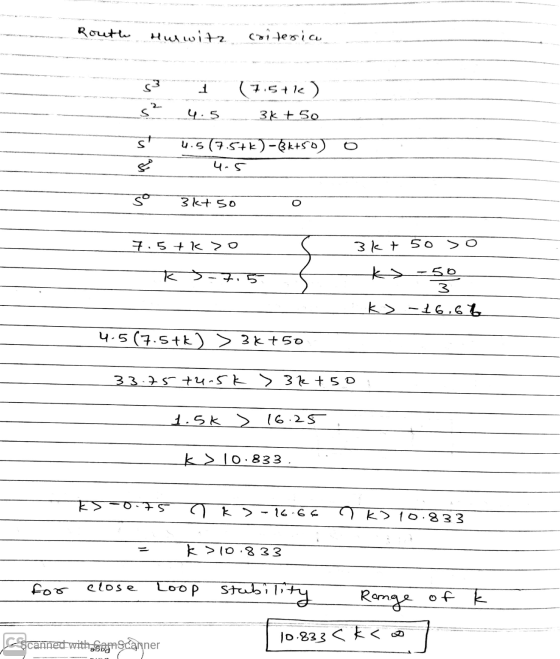
. S3 G(s) H (s) = K s2 + s-4 For the closed loop system use a Nyquist plot to, a. Classify the st...
 . S3 G(s) H (s) = K s2 + s-4 For the closed loop system use a Nyquist plot to, a. Classify the stability of the system. b. Find the range of K for a stable system. (analytic by hand) c. Find the value of K for a marginally stable system. (analytic by hand)
. S3 G(s) H (s) = K s2 + s-4 For the closed loop system use a Nyquist plot to, a. Classify the stability of the...
. S3 G(s) H (s) = K s2 + s-4 For the closed loop system use a Nyquist plot to, a. Classify the stability of the system. b. Find the range of K for a stable system. (analytic by hand) c. Find the value of K for a marginally stable system. (analytic by hand)
. S3 G(s) H (s) = K s2 + s-4 For the closed loop system use a Nyquist plot to, a. Classify the stability of the...
Can someone help me with problem 4? You dont need to find the answers for problem...
 Can someone help me with problem 4? You dont need to find the
answers for problem 6. Just use the transfer function from problem
6 to do problem 4.
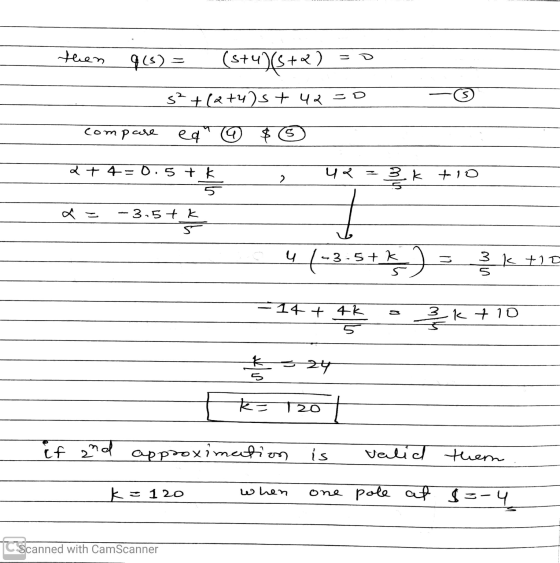
6. Given the unity feedback system with the forward transfer function KG)H(s + 2)(s + 10) a) b) c) d) e) Sketch the root locus Find the breakaway point Find the gain at the breakaway point If one of the poles of the closed-loop system is at s--11, find the other...
Can someone help me with problem 4? You dont need to find the
answers for problem 6. Just use the transfer function from problem
6 to do problem 4.
6. Given the unity feedback system with the forward transfer function KG)H(s + 2)(s + 10) a) b) c) d) e) Sketch the root locus Find the breakaway point Find the gain at the breakaway point If one of the poles of the closed-loop system is at s--11, find the other...
Consider the following control system: R + Let G(s) s +23-3 and H(s) K where K is some positive c...
 Consider the following control system: R + Let G(s) s +23-3 and H(s) K where K is some positive constant. The transfer function H(s) can be considered a proportional feedback controller. (a) Examine the behavior of the system for different values of K. Try the values K 2, 4, 8. In each case, plot the pole-zero map of the closed-loop system and examine the step response. Comment on the stability of the system. Find the value of K for which...
Consider the following control system: R + Let G(s) s +23-3 and H(s) K where K is some positive constant. The transfer function H(s) can be considered a proportional feedback controller. (a) Examine the behavior of the system for different values of K. Try the values K 2, 4, 8. In each case, plot the pole-zero map of the closed-loop system and examine the step response. Comment on the stability of the system. Find the value of K for which...
Problem 1 Y(s) Given G(s) H(s) 0(s)-1 a) Determine the transfer function T(s) of the system above. b) Determine the mamber of RHP or L.HP poles of the system. Is tdhe system stable? Why or why no?...
 Problem 1 Y(s) Given G(s) H(s) 0(s)-1 a) Determine the transfer function T(s) of the system above. b) Determine the mamber of RHP or L.HP poles of the system. Is tdhe system stable? Why or why no? c) H HG) were modified as follows. Determine the system stability as a function of parameter k, i.e, what is the minimal value of k required to keep the system stable? d) Sketch Bode the plot for T(s) including data 'k, derived from...
Problem 1 Y(s) Given G(s) H(s) 0(s)-1 a) Determine the transfer function T(s) of the system above. b) Determine the mamber of RHP or L.HP poles of the system. Is tdhe system stable? Why or why no? c) H HG) were modified as follows. Determine the system stability as a function of parameter k, i.e, what is the minimal value of k required to keep the system stable? d) Sketch Bode the plot for T(s) including data 'k, derived from...
Q.2 (10 marks) Consider the system shown in Fig.2 with K(5-3) H(s) = (s – 4)...
 Q.2 (10 marks) Consider the system shown in Fig.2 with K(5-3) H(s) = (s – 4) (s+1)(s+2) (a) Sketch the root locus of the closed-loop system as the gain K varies from zero to infinity. (b) Based on the root locus, determine the range of K such that the system is stable and under-damped. (c) Determine the K value such that the closed-loop system is over-damped and stable. (d) Use MATLAB draw the root locus and confirm the root locus...
Q.2 (10 marks) Consider the system shown in Fig.2 with K(5-3) H(s) = (s – 4) (s+1)(s+2) (a) Sketch the root locus of the closed-loop system as the gain K varies from zero to infinity. (b) Based on the root locus, determine the range of K such that the system is stable and under-damped. (c) Determine the K value such that the closed-loop system is over-damped and stable. (d) Use MATLAB draw the root locus and confirm the root locus...
5.4 Consider the system with a required steady-state error of 20%, K(s + 2) s(s +3s + 5) and an a...
 5.4 Consider the system with a required steady-state error of 20%, K(s + 2) s(s +3s + 5) and an adjustable PI controller zero location. KL(s) Show that the corresponding closed-loop characteristic equation is given by s+ a Next, rewrite the equation as 1 + KG(s0 where K K K.a is constant, and Gf(s) is a function of s, and ex amine the effect of shifting the zero on the closed-loop poles. (a) Design the system for a dominant second-order...
5.4 Consider the system with a required steady-state error of 20%, K(s + 2) s(s +3s + 5) and an adjustable PI controller zero location. KL(s) Show that the corresponding closed-loop characteristic equation is given by s+ a Next, rewrite the equation as 1 + KG(s0 where K K K.a is constant, and Gf(s) is a function of s, and ex amine the effect of shifting the zero on the closed-loop poles. (a) Design the system for a dominant second-order...
3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot and determine the K value such that the d...
 3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot and determine the K value such that the damping ratio of a pair of dominant complex-conjugate closed-loop poles is 0.5. Ri)1 C(s)
3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot...
3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot and determine the K value such that the damping ratio of a pair of dominant complex-conjugate closed-loop poles is 0.5. Ri)1 C(s)
3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot...
 2. For the feedback system shown below: X 1 K s+3 S s+10 XX ) . - a Find the open loep gain. G6) k b. Find the closed foop galn S410 (EnXey& ke -3 . Find the open loop poles c. d. Find the epen loop zeros . Find K that makes 4 one of the closed loop poles. (h+5) Scanned by CamScanne
2. For the feedback system shown below: X 1 K s+3 S s+10 XX ) . - a Find the open loep gain. G6) k b. Find the closed foop galn S410 (EnXey& ke -3 . Find the open loop poles c. d. Find the epen loop zeros . Find K that makes 4 one of the closed loop poles. (h+5) Scanned by CamScanne
 66. The system shown in Figure P6.16 has G (s) = 1/s(s+2) (s + 4). Find the following: R(s) + E() K G,G) KES FIGURE P6.16 a. The value of K, for which the inner loop will have two equal negative real poles and the associated range of K, for system stability. b. The value of K, at which the system oscillates and the associated frequency of oscillation. c. The gain Ki at which a real closed-loop pole is at...
66. The system shown in Figure P6.16 has G (s) = 1/s(s+2) (s + 4). Find the following: R(s) + E() K G,G) KES FIGURE P6.16 a. The value of K, for which the inner loop will have two equal negative real poles and the associated range of K, for system stability. b. The value of K, at which the system oscillates and the associated frequency of oscillation. c. The gain Ki at which a real closed-loop pole is at...
 Theroot-locus design method
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angles. the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, respectively, and the range of k for closed-loop stability 5 10ん k(s+21
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root...
Theroot-locus design method
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angles. the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, respectively, and the range of k for closed-loop stability 5 10ん k(s+21
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root...
 . S3 G(s) H (s) = K s2 + s-4 For the closed loop system use a Nyquist plot to, a. Classify the stability of the system. b. Find the range of K for a stable system. (analytic by hand) c. Find the value of K for a marginally stable system. (analytic by hand)
. S3 G(s) H (s) = K s2 + s-4 For the closed loop system use a Nyquist plot to, a. Classify the stability of the...
. S3 G(s) H (s) = K s2 + s-4 For the closed loop system use a Nyquist plot to, a. Classify the stability of the system. b. Find the range of K for a stable system. (analytic by hand) c. Find the value of K for a marginally stable system. (analytic by hand)
. S3 G(s) H (s) = K s2 + s-4 For the closed loop system use a Nyquist plot to, a. Classify the stability of the...
 Can someone help me with problem 4? You dont need to find the
answers for problem 6. Just use the transfer function from problem
6 to do problem 4.
6. Given the unity feedback system with the forward transfer function KG)H(s + 2)(s + 10) a) b) c) d) e) Sketch the root locus Find the breakaway point Find the gain at the breakaway point If one of the poles of the closed-loop system is at s--11, find the other...
Can someone help me with problem 4? You dont need to find the
answers for problem 6. Just use the transfer function from problem
6 to do problem 4.
6. Given the unity feedback system with the forward transfer function KG)H(s + 2)(s + 10) a) b) c) d) e) Sketch the root locus Find the breakaway point Find the gain at the breakaway point If one of the poles of the closed-loop system is at s--11, find the other...
 Consider the following control system: R + Let G(s) s +23-3 and H(s) K where K is some positive constant. The transfer function H(s) can be considered a proportional feedback controller. (a) Examine the behavior of the system for different values of K. Try the values K 2, 4, 8. In each case, plot the pole-zero map of the closed-loop system and examine the step response. Comment on the stability of the system. Find the value of K for which...
Consider the following control system: R + Let G(s) s +23-3 and H(s) K where K is some positive constant. The transfer function H(s) can be considered a proportional feedback controller. (a) Examine the behavior of the system for different values of K. Try the values K 2, 4, 8. In each case, plot the pole-zero map of the closed-loop system and examine the step response. Comment on the stability of the system. Find the value of K for which...
 Problem 1 Y(s) Given G(s) H(s) 0(s)-1 a) Determine the transfer function T(s) of the system above. b) Determine the mamber of RHP or L.HP poles of the system. Is tdhe system stable? Why or why no? c) H HG) were modified as follows. Determine the system stability as a function of parameter k, i.e, what is the minimal value of k required to keep the system stable? d) Sketch Bode the plot for T(s) including data 'k, derived from...
Problem 1 Y(s) Given G(s) H(s) 0(s)-1 a) Determine the transfer function T(s) of the system above. b) Determine the mamber of RHP or L.HP poles of the system. Is tdhe system stable? Why or why no? c) H HG) were modified as follows. Determine the system stability as a function of parameter k, i.e, what is the minimal value of k required to keep the system stable? d) Sketch Bode the plot for T(s) including data 'k, derived from...
 Q.2 (10 marks) Consider the system shown in Fig.2 with K(5-3) H(s) = (s – 4) (s+1)(s+2) (a) Sketch the root locus of the closed-loop system as the gain K varies from zero to infinity. (b) Based on the root locus, determine the range of K such that the system is stable and under-damped. (c) Determine the K value such that the closed-loop system is over-damped and stable. (d) Use MATLAB draw the root locus and confirm the root locus...
Q.2 (10 marks) Consider the system shown in Fig.2 with K(5-3) H(s) = (s – 4) (s+1)(s+2) (a) Sketch the root locus of the closed-loop system as the gain K varies from zero to infinity. (b) Based on the root locus, determine the range of K such that the system is stable and under-damped. (c) Determine the K value such that the closed-loop system is over-damped and stable. (d) Use MATLAB draw the root locus and confirm the root locus...
 5.4 Consider the system with a required steady-state error of 20%, K(s + 2) s(s +3s + 5) and an adjustable PI controller zero location. KL(s) Show that the corresponding closed-loop characteristic equation is given by s+ a Next, rewrite the equation as 1 + KG(s0 where K K K.a is constant, and Gf(s) is a function of s, and ex amine the effect of shifting the zero on the closed-loop poles. (a) Design the system for a dominant second-order...
5.4 Consider the system with a required steady-state error of 20%, K(s + 2) s(s +3s + 5) and an adjustable PI controller zero location. KL(s) Show that the corresponding closed-loop characteristic equation is given by s+ a Next, rewrite the equation as 1 + KG(s0 where K K K.a is constant, and Gf(s) is a function of s, and ex amine the effect of shifting the zero on the closed-loop poles. (a) Design the system for a dominant second-order...
 3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot and determine the K value such that the damping ratio of a pair of dominant complex-conjugate closed-loop poles is 0.5. Ri)1 C(s)
3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot...
3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot and determine the K value such that the damping ratio of a pair of dominant complex-conjugate closed-loop poles is 0.5. Ri)1 C(s)
3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot...
Most questions answered within 3 hours.
-
Write the ionic equations for the first stage of salts
hydrolysis.
Anion, Cation?
Na2S
NiSO4
K2SO4...
asked 28 minutes ago -
suppose there is a normally distributed population with a mean of
250 and a standard deviation...
asked 1 hour ago -
Question Three
Suppose you as project manager are using the Waterfall
development methodology on a large...
asked 2 hours ago -
Which statement is not true about welfare in Canada?
A.Benefits typically vary based on one's ability...
asked 2 hours ago -
Please help me with FLOWCHART and UML diagram for class,
thank you!
#include <iostream>
#include <fstream>...
asked 3 hours ago -
3. Describe the “logic circuit” of the Lac operon. Which
proteins are bound or not to...
asked 3 hours ago -
Ayesha’s adjusted gross income is $60,000 in 2019. She donated a
piece of artwork with a...
asked 3 hours ago -
For Dijkstra’s shortest path algorithm:
a. Give the Big-O time for Dijkstra’s shortest path algorithm
and...
asked 3 hours ago -
Phosphorus violates the 'octet rule' in biological molecules,
forming more covalent bonds than expected based on...
asked 3 hours ago -
A 1.3 eV electron has a 10-4 probability of tunneling
through a 2.4 eV potential barrier....
asked 4 hours ago -
What is the one ingredient that is common to being successful
with all stakeholders?
profit
trust...
asked 4 hours ago -
Write an assembly language 32 bit program that reads in lines of
text by a .txt...
asked 4 hours ago