Answer all parts and show all work.
Homework Answers





Add Answer to:
Answer all parts and show all work.
Design a Pl or PDcontroller for the system Go)+...
3. Design a PI or PD controller for the system G(8) = s(s+10) to meet the...
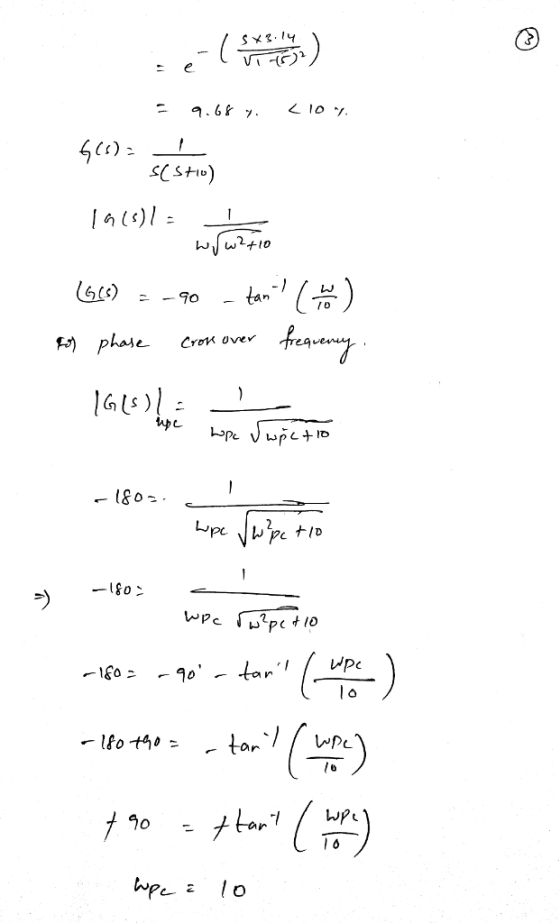
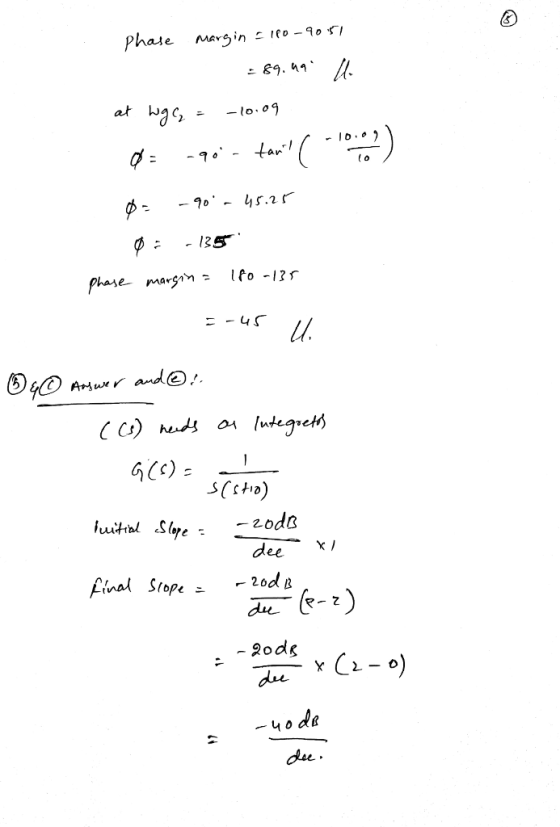
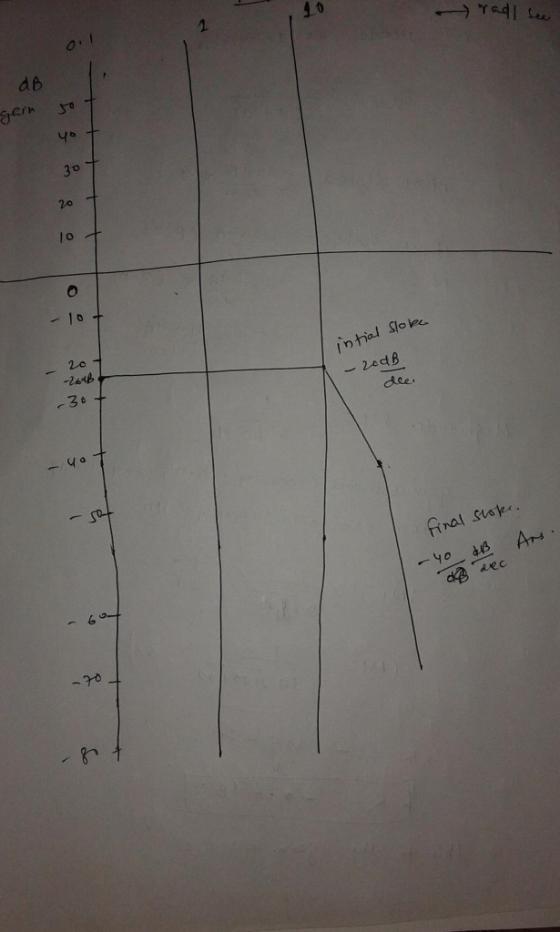
 3. Design a PI or PD controller for the system G(8) = s(s+10) to meet the following specifications • Zero steady state error for unit step reference input • tr< 0.12 - . %OS < 10%. (a) Determine the low frequency gain, crossover frequency and phase margin necessary to meet the specifications. (b) Decide if C(s) needs an integrator. Plot the Bode plot of either G(s) or G(s)/s, depending on your choice. (c) Use sisotool (or iteration) to choose a...
3. Design a PI or PD controller for the system G(8) = s(s+10) to meet the following specifications • Zero steady state error for unit step reference input • tr< 0.12 - . %OS < 10%. (a) Determine the low frequency gain, crossover frequency and phase margin necessary to meet the specifications. (b) Decide if C(s) needs an integrator. Plot the Bode plot of either G(s) or G(s)/s, depending on your choice. (c) Use sisotool (or iteration) to choose a...
4. You want to design an orientation controller for a satellite system whose thrusters provide a...
 4. You want to design an orientation controller for a satellite system whose thrusters provide a torque T to modify the angular position 0 with transfer function (s) 0.1 G(s) T(s) $2 Y() R(s) G(s) C(s) You want to add damping to the system to minimize any oscillations (%OS < 5%) but still maintain a 1% settling time of less than 60 s to a unit step input. I(a) Sketch the allowable pole locations in the complex plane to meet...
4. You want to design an orientation controller for a satellite system whose thrusters provide a torque T to modify the angular position 0 with transfer function (s) 0.1 G(s) T(s) $2 Y() R(s) G(s) C(s) You want to add damping to the system to minimize any oscillations (%OS < 5%) but still maintain a 1% settling time of less than 60 s to a unit step input. I(a) Sketch the allowable pole locations in the complex plane to meet...
Consider the unity-feedback system shown below: R(s) E(s) input: r(t), output: y(t) C(s) P(s) error: e()...
 Consider the unity-feedback system shown below: R(s) E(s) input: r(t), output: y(t) C(s) P(s) error: e() r(t) y(t) closed-loop transfer-function: Hyr(sD t the closed-loop transfer-function be Hyr(s) Y (s) R(s) Let the transfer-function of the plant be P(s) 10 s (s 1) (s 5) The open-loop transfer-function is G(s) P(s) C(s) DESIGN OBJECTIVES: Find a controller C(s) such that the following are satisfied i) The closed-loop system is stable. ii) The steady-state error ess due to a unit-ramp input r(t)...
Consider the unity-feedback system shown below: R(s) E(s) input: r(t), output: y(t) C(s) P(s) error: e() r(t) y(t) closed-loop transfer-function: Hyr(sD t the closed-loop transfer-function be Hyr(s) Y (s) R(s) Let the transfer-function of the plant be P(s) 10 s (s 1) (s 5) The open-loop transfer-function is G(s) P(s) C(s) DESIGN OBJECTIVES: Find a controller C(s) such that the following are satisfied i) The closed-loop system is stable. ii) The steady-state error ess due to a unit-ramp input r(t)...
Spring 2019 3. Given a closed-loop control system with unity feedback is shown in the block...
 Spring 2019 3. Given a closed-loop control system with unity feedback is shown in the block diagram. G(s) is the open-loop transfer function, and the controller is a gain, K. 1. (20) Calculate the open-loop transfer function tar →Q--t G(s) (10) Calculate the steady-state error to a step input of the open-loop system. 7. (in Bode Form) from the Bode plot. (10) Calculate the shortest possible settling time with a percentage overshoot of 5% or less. 8. 2. (10)Plot the...
Spring 2019 3. Given a closed-loop control system with unity feedback is shown in the block diagram. G(s) is the open-loop transfer function, and the controller is a gain, K. 1. (20) Calculate the open-loop transfer function tar →Q--t G(s) (10) Calculate the steady-state error to a step input of the open-loop system. 7. (in Bode Form) from the Bode plot. (10) Calculate the shortest possible settling time with a percentage overshoot of 5% or less. 8. 2. (10)Plot the...
Consider the system shown as below. Draw a Bode diagram of the open-loop transfer function G(s).
 1 Consider the system shown as below. Draw a Bode diagram of the open-loop transfer function G(s). Determine the phase margin, gain-crossover frequency, gain margin and phase-crossover frequency, (Sketch the bode diagram by hand) 2 Consider the system shown as below. Use MATLAB to draw a bode diagram of the open-loop transfer function G(s). Show the gain-crossover frequency and phase-crossover frequency in the Bode diagram and determine the phase margin and gain margin. 3. Consider the system shown as below. Design a...
1 Consider the system shown as below. Draw a Bode diagram of the open-loop transfer function G(s). Determine the phase margin, gain-crossover frequency, gain margin and phase-crossover frequency, (Sketch the bode diagram by hand) 2 Consider the system shown as below. Use MATLAB to draw a bode diagram of the open-loop transfer function G(s). Show the gain-crossover frequency and phase-crossover frequency in the Bode diagram and determine the phase margin and gain margin. 3. Consider the system shown as below. Design a...
G) r(t) Figure 1: Feedback control system A pulley and belt transmission has a linearized relationship between the driven pulley angle θ(t) in degrees and the input torque u(t) in Newton meters given...
 G) r(t) Figure 1: Feedback control system A pulley and belt transmission has a linearized relationship between the driven pulley angle θ(t) in degrees and the input torque u(t) in Newton meters given by the following differential equation du(t) A feedback control system (illustrated in Figure 1) needs to be designed such that the closed-loop system is asymptotically stable and such that the following design criteria are met: 1. the gain crossover frequency a should be between and a 2....
G) r(t) Figure 1: Feedback control system A pulley and belt transmission has a linearized relationship between the driven pulley angle θ(t) in degrees and the input torque u(t) in Newton meters given by the following differential equation du(t) A feedback control system (illustrated in Figure 1) needs to be designed such that the closed-loop system is asymptotically stable and such that the following design criteria are met: 1. the gain crossover frequency a should be between and a 2....
Prob. 5 (30 pts): You are to design a compensator for a radar antenna as shown...
 Prob. 5 (30 pts): You are to design a compensator for a radar antenna as shown below. Determine G. (s) so that (a)* The closed-loop system has a bandwidth of approximately 20 rad/s. (b) The closed loop system must have positive phase margin. (6) Increase the attenuation at 200 rad/sec or higher. *You can assume that the bandwidth of the closed system is equal to the gain crossover frequency of the open loop system. You may wish to use the...
Prob. 5 (30 pts): You are to design a compensator for a radar antenna as shown below. Determine G. (s) so that (a)* The closed-loop system has a bandwidth of approximately 20 rad/s. (b) The closed loop system must have positive phase margin. (6) Increase the attenuation at 200 rad/sec or higher. *You can assume that the bandwidth of the closed system is equal to the gain crossover frequency of the open loop system. You may wish to use the...
Please help as much as you can, I want to use this probem as a study guide for the final so any and all help / code is super appreciatted. Thanks Consider a simple direct current motor with transfer...
 Please help as much as you can, I want to use this probem as a
study guide for the final so any and all help / code is super
appreciatted. Thanks
Consider a simple direct current motor with transfer function 10 P(s) = 2s2+s (a) Plot a Bode plot for the plant's transfer function. (b) Design a PD-controller that gives a closed loop bandwidth, wBw, of at least 10 rad/sec and has a phase margin of at least 30°· Using...
Please help as much as you can, I want to use this probem as a
study guide for the final so any and all help / code is super
appreciatted. Thanks
Consider a simple direct current motor with transfer function 10 P(s) = 2s2+s (a) Plot a Bode plot for the plant's transfer function. (b) Design a PD-controller that gives a closed loop bandwidth, wBw, of at least 10 rad/sec and has a phase margin of at least 30°· Using...
Assignment 3: Frequency Domain Controller Design using Bode-plots 2 Augment the open loop plant G(s) =...
 Assignment 3: Frequency Domain Controller Design using Bode-plots 2 Augment the open loop plant G(s) = RS), with sim- ple feedback an a dynamic compensator to meet the following specifications: (a) a cross over frequency of we 3 [rad/sec] (b) a phase margin better than 45. (c) a steady state error when tracking a step input < 5%. in H(s) G(sRecall that Bode plots are applied to the loop gain. out
Assignment 3: Frequency Domain Controller Design using Bode-plots 2 Augment the open loop plant G(s) = RS), with sim- ple feedback an a dynamic compensator to meet the following specifications: (a) a cross over frequency of we 3 [rad/sec] (b) a phase margin better than 45. (c) a steady state error when tracking a step input < 5%. in H(s) G(sRecall that Bode plots are applied to the loop gain. out
Assignment 3: Frequency Domain Controller Design using Bode-plots 10 2 Augment the open loop plant G()...
 Assignment 3: Frequency Domain Controller Design using Bode-plots 10 2 Augment the open loop plant G() +27 with sim ple feedback an a dynamic compensator to meet the following specifications: (a) a cross over frequency of w 3 [rad/sec). (b) a phase margin better than 45o (c) a steady state error when tracking a step input < 5%. in H(s) G(s) Recall that Bode plots are applied to the loop gain. out
Assignment 3: Frequency Domain Controller Design using Bode-plots 10 2 Augment the open loop plant G() +27 with sim ple feedback an a dynamic compensator to meet the following specifications: (a) a cross over frequency of w 3 [rad/sec). (b) a phase margin better than 45o (c) a steady state error when tracking a step input < 5%. in H(s) G(s) Recall that Bode plots are applied to the loop gain. out
 3. Design a PI or PD controller for the system G(8) = s(s+10) to meet the following specifications • Zero steady state error for unit step reference input • tr< 0.12 - . %OS < 10%. (a) Determine the low frequency gain, crossover frequency and phase margin necessary to meet the specifications. (b) Decide if C(s) needs an integrator. Plot the Bode plot of either G(s) or G(s)/s, depending on your choice. (c) Use sisotool (or iteration) to choose a...
3. Design a PI or PD controller for the system G(8) = s(s+10) to meet the following specifications • Zero steady state error for unit step reference input • tr< 0.12 - . %OS < 10%. (a) Determine the low frequency gain, crossover frequency and phase margin necessary to meet the specifications. (b) Decide if C(s) needs an integrator. Plot the Bode plot of either G(s) or G(s)/s, depending on your choice. (c) Use sisotool (or iteration) to choose a...
 4. You want to design an orientation controller for a satellite system whose thrusters provide a torque T to modify the angular position 0 with transfer function (s) 0.1 G(s) T(s) $2 Y() R(s) G(s) C(s) You want to add damping to the system to minimize any oscillations (%OS < 5%) but still maintain a 1% settling time of less than 60 s to a unit step input. I(a) Sketch the allowable pole locations in the complex plane to meet...
4. You want to design an orientation controller for a satellite system whose thrusters provide a torque T to modify the angular position 0 with transfer function (s) 0.1 G(s) T(s) $2 Y() R(s) G(s) C(s) You want to add damping to the system to minimize any oscillations (%OS < 5%) but still maintain a 1% settling time of less than 60 s to a unit step input. I(a) Sketch the allowable pole locations in the complex plane to meet...
 Consider the unity-feedback system shown below: R(s) E(s) input: r(t), output: y(t) C(s) P(s) error: e() r(t) y(t) closed-loop transfer-function: Hyr(sD t the closed-loop transfer-function be Hyr(s) Y (s) R(s) Let the transfer-function of the plant be P(s) 10 s (s 1) (s 5) The open-loop transfer-function is G(s) P(s) C(s) DESIGN OBJECTIVES: Find a controller C(s) such that the following are satisfied i) The closed-loop system is stable. ii) The steady-state error ess due to a unit-ramp input r(t)...
Consider the unity-feedback system shown below: R(s) E(s) input: r(t), output: y(t) C(s) P(s) error: e() r(t) y(t) closed-loop transfer-function: Hyr(sD t the closed-loop transfer-function be Hyr(s) Y (s) R(s) Let the transfer-function of the plant be P(s) 10 s (s 1) (s 5) The open-loop transfer-function is G(s) P(s) C(s) DESIGN OBJECTIVES: Find a controller C(s) such that the following are satisfied i) The closed-loop system is stable. ii) The steady-state error ess due to a unit-ramp input r(t)...
 Spring 2019 3. Given a closed-loop control system with unity feedback is shown in the block diagram. G(s) is the open-loop transfer function, and the controller is a gain, K. 1. (20) Calculate the open-loop transfer function tar →Q--t G(s) (10) Calculate the steady-state error to a step input of the open-loop system. 7. (in Bode Form) from the Bode plot. (10) Calculate the shortest possible settling time with a percentage overshoot of 5% or less. 8. 2. (10)Plot the...
Spring 2019 3. Given a closed-loop control system with unity feedback is shown in the block diagram. G(s) is the open-loop transfer function, and the controller is a gain, K. 1. (20) Calculate the open-loop transfer function tar →Q--t G(s) (10) Calculate the steady-state error to a step input of the open-loop system. 7. (in Bode Form) from the Bode plot. (10) Calculate the shortest possible settling time with a percentage overshoot of 5% or less. 8. 2. (10)Plot the...
 G) r(t) Figure 1: Feedback control system A pulley and belt transmission has a linearized relationship between the driven pulley angle θ(t) in degrees and the input torque u(t) in Newton meters given by the following differential equation du(t) A feedback control system (illustrated in Figure 1) needs to be designed such that the closed-loop system is asymptotically stable and such that the following design criteria are met: 1. the gain crossover frequency a should be between and a 2....
G) r(t) Figure 1: Feedback control system A pulley and belt transmission has a linearized relationship between the driven pulley angle θ(t) in degrees and the input torque u(t) in Newton meters given by the following differential equation du(t) A feedback control system (illustrated in Figure 1) needs to be designed such that the closed-loop system is asymptotically stable and such that the following design criteria are met: 1. the gain crossover frequency a should be between and a 2....
 Prob. 5 (30 pts): You are to design a compensator for a radar antenna as shown below. Determine G. (s) so that (a)* The closed-loop system has a bandwidth of approximately 20 rad/s. (b) The closed loop system must have positive phase margin. (6) Increase the attenuation at 200 rad/sec or higher. *You can assume that the bandwidth of the closed system is equal to the gain crossover frequency of the open loop system. You may wish to use the...
Prob. 5 (30 pts): You are to design a compensator for a radar antenna as shown below. Determine G. (s) so that (a)* The closed-loop system has a bandwidth of approximately 20 rad/s. (b) The closed loop system must have positive phase margin. (6) Increase the attenuation at 200 rad/sec or higher. *You can assume that the bandwidth of the closed system is equal to the gain crossover frequency of the open loop system. You may wish to use the...
 Please help as much as you can, I want to use this probem as a
study guide for the final so any and all help / code is super
appreciatted. Thanks
Consider a simple direct current motor with transfer function 10 P(s) = 2s2+s (a) Plot a Bode plot for the plant's transfer function. (b) Design a PD-controller that gives a closed loop bandwidth, wBw, of at least 10 rad/sec and has a phase margin of at least 30°· Using...
Please help as much as you can, I want to use this probem as a
study guide for the final so any and all help / code is super
appreciatted. Thanks
Consider a simple direct current motor with transfer function 10 P(s) = 2s2+s (a) Plot a Bode plot for the plant's transfer function. (b) Design a PD-controller that gives a closed loop bandwidth, wBw, of at least 10 rad/sec and has a phase margin of at least 30°· Using...
 Assignment 3: Frequency Domain Controller Design using Bode-plots 2 Augment the open loop plant G(s) = RS), with sim- ple feedback an a dynamic compensator to meet the following specifications: (a) a cross over frequency of we 3 [rad/sec] (b) a phase margin better than 45. (c) a steady state error when tracking a step input < 5%. in H(s) G(sRecall that Bode plots are applied to the loop gain. out
Assignment 3: Frequency Domain Controller Design using Bode-plots 2 Augment the open loop plant G(s) = RS), with sim- ple feedback an a dynamic compensator to meet the following specifications: (a) a cross over frequency of we 3 [rad/sec] (b) a phase margin better than 45. (c) a steady state error when tracking a step input < 5%. in H(s) G(sRecall that Bode plots are applied to the loop gain. out
 Assignment 3: Frequency Domain Controller Design using Bode-plots 10 2 Augment the open loop plant G() +27 with sim ple feedback an a dynamic compensator to meet the following specifications: (a) a cross over frequency of w 3 [rad/sec). (b) a phase margin better than 45o (c) a steady state error when tracking a step input < 5%. in H(s) G(s) Recall that Bode plots are applied to the loop gain. out
Assignment 3: Frequency Domain Controller Design using Bode-plots 10 2 Augment the open loop plant G() +27 with sim ple feedback an a dynamic compensator to meet the following specifications: (a) a cross over frequency of w 3 [rad/sec). (b) a phase margin better than 45o (c) a steady state error when tracking a step input < 5%. in H(s) G(s) Recall that Bode plots are applied to the loop gain. out
Most questions answered within 3 hours.
-
The random variable X is exponentially distributed, where X
represents the time it takes for a...
asked 8 minutes ago -
a) Write a verilog module for 1:4 Demultiplexer using verilog
primitives.
b) Design 1-to-4 DEMUX using...
asked 3 minutes ago -
MATLAB
write a MATLAB function (1) output a third-order polynomial
function with the coefficients as the...
asked 15 minutes ago -
A z-score
communicates a raw score’s "relative standing"
under the normal curve in relation to:
asked 24 minutes ago -
An object is vibrating on a spring with the following equation
of motion:
?=(30 ??)cos((2?)/(160)?)
a)...
asked 23 minutes ago -
Vulcan Flyovers offers scenic overflights of Mount St. Helens,
the volcano in Washington State that explosively...
asked 26 minutes ago -
If organizations do not adapt fast enough and move incrementally
from the twentieth-century model to the...
asked 26 minutes ago -
A helium balloon with 2.5L of gas has a gauge pressure of 10,000
Pa. The balloon...
asked 31 minutes ago -
What is responsible for Jupiter's enormous magnetic field?
asked 46 minutes ago -
At the end of the year, a company offered to buy 5,000 units of
a product...
asked 47 minutes ago -
Implement C++ program for each of the following.
Let D = [-48, -14, -8, 0, 1,...
asked 1 hour ago -
Consider a labor market in which LD = 400 – 4W and LS = 250 +...
asked 1 hour ago