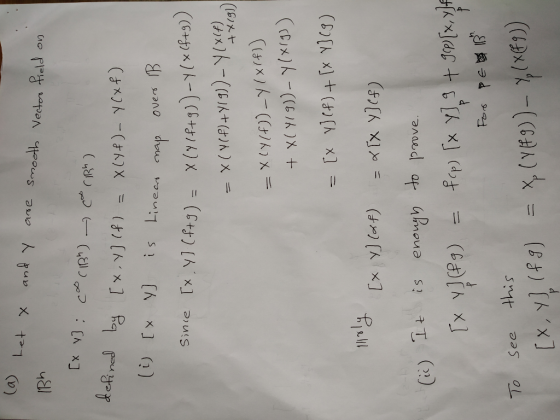
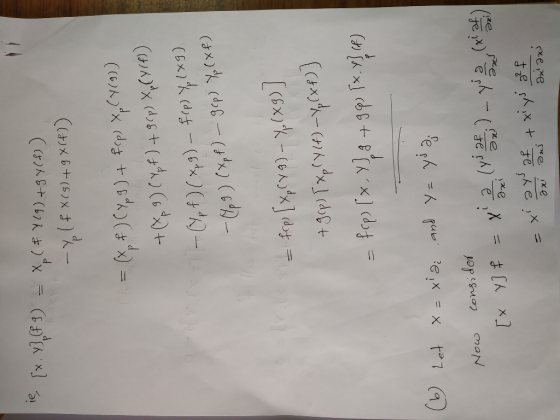
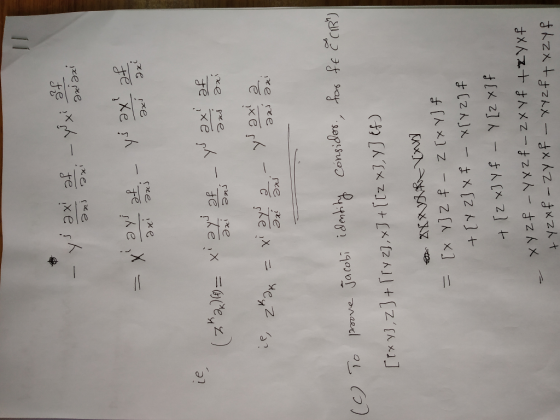
![17] L(t X and Y be sinooth vector fields on R. Define a map IXYLCR) → CR) by a Show that X, Y is a derivation on Co (R), hence represents a smooth vector field on R. This is called the Lie bracket of X and Y lb] If we write X = Xia and Y = Ya,, then IX, Y-Zkak for some suooth functions Zk. Find an explicit expression for Zk in terms of the Xs and Ys. Ic] It is clear that IY,X)--(X,YL Prove that This identity is called the Jacobi identity and it says that the space of smooth vector fields on R is an infinite-dimensional Lie algebra.](http://img.homeworklib.com/questions/808d0750-1b04-11ec-a98e-f75003998d18.png?x-oss-process=image/resize,w_560)
Homework Answers

Add Answer to:
17] L(t X and Y be sinooth vector fields on R". Define a map IXYLC"R") →...
8. More generally, let X be any infinite-dimensional vector space equipped with an inner product ,)...
 8. More generally, let X be any infinite-dimensional vector space equipped with an inner product ,) in such a way that the induced metric is complete. In particular, there is a norm on X defined by and the metric is given by d(r, y) yl Let A denote the unit ball A x E X < 1} We know that A is closed and bounded essentially from the definitions. Show that A is not compact. (Hint: Construct a sequence xn...
8. More generally, let X be any infinite-dimensional vector space equipped with an inner product ,) in such a way that the induced metric is complete. In particular, there is a norm on X defined by and the metric is given by d(r, y) yl Let A denote the unit ball A x E X < 1} We know that A is closed and bounded essentially from the definitions. Show that A is not compact. (Hint: Construct a sequence xn...
1. Sketch the vector fields: (a) F(F) (b) F(r, y)(+ y)+ (x- y)
 1. Sketch the vector fields: (a) F(F) (b) F(r, y)(+ y)+ (x- y)
1. Sketch the vector fields: (a) F(F) (b) F(r, y)(+ y)+ (x- y)
Let V be a finite dimensional vector space over R with an inner product 〈x, y〉 ∈ R for x, y ∈ V . (a) (3points) Let λ∈...
Let V be a finite dimensional vector space over R with an inner product 〈x, y〉 ∈ R for x, y ∈ V . (a) (3points) Let λ∈R with λ>0. Show that 〈x,y〉′ = λ〈x,y〉, for x,y ∈ V, (b) (2 points) Let T : V → V be a linear operator, such that 〈T(x),T(y)〉 = 〈x,y〉, for all x,y ∈ V. Show that T is one-to-one. (c) (2 points) Recall that the norm of a vector x ∈ V...
all a,b,c,d 1. Suppose C is simple closed curve in the plane given by the parametric equation and recall that the outward unit normal vector n to C is given by y(t r'(t) If g is a scalar field on...
 all a,b,c,d
1. Suppose C is simple closed curve in the plane given by the parametric equation and recall that the outward unit normal vector n to C is given by y(t r'(t) If g is a scalar field on C with gradient Vg, we define the normal derivative Dng by and we define the Laplacian, V2g, of g by For this problem, assume D and C satisfy the hypotheses of Green's Theorem and the appropriate partial derivatives of f...
all a,b,c,d
1. Suppose C is simple closed curve in the plane given by the parametric equation and recall that the outward unit normal vector n to C is given by y(t r'(t) If g is a scalar field on C with gradient Vg, we define the normal derivative Dng by and we define the Laplacian, V2g, of g by For this problem, assume D and C satisfy the hypotheses of Green's Theorem and the appropriate partial derivatives of f...
QB(27pts)(a). Evaluate the circulation ofF(xy)-<x,y+x> on the curve r(t)=<2cost, 2sinp, foross2n (b) Evaluate J F.dr, where C is a piecewise smooth path from (1,0) to (2,1) and F- (e'...
 QB(27pts)(a). Evaluate the circulation ofF(xy)-<x,y+x> on the curve r(t)=<2cost, 2sinp, foross2n (b) Evaluate J F.dr, where C is a piecewise smooth path from (1,0) to (2,1) and F- (e'cos x)i +(e'sinx)j [Hint: Test F for conservative (c). Use green theorem to express the line integral as a double integral and then evaluate. where C is the circle x+y-4 with counterclockwise orientation. (d(Bonus10 pts) Consider the vector field Foxyz) a. Find curl F y, ,z> F.dr where C is the curve...
QB(27pts)(a). Evaluate the circulation ofF(xy)-<x,y+x> on the curve r(t)=<2cost, 2sinp, foross2n (b) Evaluate J F.dr, where C is a piecewise smooth path from (1,0) to (2,1) and F- (e'cos x)i +(e'sinx)j [Hint: Test F for conservative (c). Use green theorem to express the line integral as a double integral and then evaluate. where C is the circle x+y-4 with counterclockwise orientation. (d(Bonus10 pts) Consider the vector field Foxyz) a. Find curl F y, ,z> F.dr where C is the curve...
1. Show that the Lagrangians L(t,q, y) and Īct, 4, ) = L(1,4,0) + f/10, 9)...
 1. Show that the Lagrangians L(t,q, y) and Īct, 4, ) = L(1,4,0) + f/10, 9) yield the same Euler-Lagrange equations. Here q e R and f(t,q) is an arbitrary function. 2 Lagrangian mechanics In mechanics, the space where the motion of a system lies is called the configuration space, which is usually an n-dimensional manifold Q. Motion of a system is defined as a curve q : R + Qon Q. Conventionally, we use a rather than 1 to...
1. Show that the Lagrangians L(t,q, y) and Īct, 4, ) = L(1,4,0) + f/10, 9) yield the same Euler-Lagrange equations. Here q e R and f(t,q) is an arbitrary function. 2 Lagrangian mechanics In mechanics, the space where the motion of a system lies is called the configuration space, which is usually an n-dimensional manifold Q. Motion of a system is defined as a curve q : R + Qon Q. Conventionally, we use a rather than 1 to...
 8. More generally, let X be any infinite-dimensional vector space equipped with an inner product ,) in such a way that the induced metric is complete. In particular, there is a norm on X defined by and the metric is given by d(r, y) yl Let A denote the unit ball A x E X < 1} We know that A is closed and bounded essentially from the definitions. Show that A is not compact. (Hint: Construct a sequence xn...
8. More generally, let X be any infinite-dimensional vector space equipped with an inner product ,) in such a way that the induced metric is complete. In particular, there is a norm on X defined by and the metric is given by d(r, y) yl Let A denote the unit ball A x E X < 1} We know that A is closed and bounded essentially from the definitions. Show that A is not compact. (Hint: Construct a sequence xn...
 1. Sketch the vector fields: (a) F(F) (b) F(r, y)(+ y)+ (x- y)
1. Sketch the vector fields: (a) F(F) (b) F(r, y)(+ y)+ (x- y)
 all a,b,c,d
1. Suppose C is simple closed curve in the plane given by the parametric equation and recall that the outward unit normal vector n to C is given by y(t r'(t) If g is a scalar field on C with gradient Vg, we define the normal derivative Dng by and we define the Laplacian, V2g, of g by For this problem, assume D and C satisfy the hypotheses of Green's Theorem and the appropriate partial derivatives of f...
all a,b,c,d
1. Suppose C is simple closed curve in the plane given by the parametric equation and recall that the outward unit normal vector n to C is given by y(t r'(t) If g is a scalar field on C with gradient Vg, we define the normal derivative Dng by and we define the Laplacian, V2g, of g by For this problem, assume D and C satisfy the hypotheses of Green's Theorem and the appropriate partial derivatives of f...
 QB(27pts)(a). Evaluate the circulation ofF(xy)-<x,y+x> on the curve r(t)=<2cost, 2sinp, foross2n (b) Evaluate J F.dr, where C is a piecewise smooth path from (1,0) to (2,1) and F- (e'cos x)i +(e'sinx)j [Hint: Test F for conservative (c). Use green theorem to express the line integral as a double integral and then evaluate. where C is the circle x+y-4 with counterclockwise orientation. (d(Bonus10 pts) Consider the vector field Foxyz) a. Find curl F y, ,z> F.dr where C is the curve...
QB(27pts)(a). Evaluate the circulation ofF(xy)-<x,y+x> on the curve r(t)=<2cost, 2sinp, foross2n (b) Evaluate J F.dr, where C is a piecewise smooth path from (1,0) to (2,1) and F- (e'cos x)i +(e'sinx)j [Hint: Test F for conservative (c). Use green theorem to express the line integral as a double integral and then evaluate. where C is the circle x+y-4 with counterclockwise orientation. (d(Bonus10 pts) Consider the vector field Foxyz) a. Find curl F y, ,z> F.dr where C is the curve...
 1. Show that the Lagrangians L(t,q, y) and Īct, 4, ) = L(1,4,0) + f/10, 9) yield the same Euler-Lagrange equations. Here q e R and f(t,q) is an arbitrary function. 2 Lagrangian mechanics In mechanics, the space where the motion of a system lies is called the configuration space, which is usually an n-dimensional manifold Q. Motion of a system is defined as a curve q : R + Qon Q. Conventionally, we use a rather than 1 to...
1. Show that the Lagrangians L(t,q, y) and Īct, 4, ) = L(1,4,0) + f/10, 9) yield the same Euler-Lagrange equations. Here q e R and f(t,q) is an arbitrary function. 2 Lagrangian mechanics In mechanics, the space where the motion of a system lies is called the configuration space, which is usually an n-dimensional manifold Q. Motion of a system is defined as a curve q : R + Qon Q. Conventionally, we use a rather than 1 to...
Most questions answered within 3 hours.
-
This table shows the US domestic demand and supply schedules
for oranges. Suppose the world price...
asked 57 seconds ago -
Please use python to explain.
Assume that the variables x and
y refer to strings. Write...
asked 1 minute ago -
Please help me create a CLASS DIAGRAM for this code:
import pygame
from pygame.sprite import Sprite...
asked 2 minutes ago -
The Merriweather Printing Company is trying to decide on the
merits of constructing a new publishing...
asked 21 minutes ago -
29) Insulin is a water-soluble hormone transported in the blood.
Which describes a likely way in...
asked 28 minutes ago -
Harden, Harden, & Harden is a venerable Wall Street stock
brokerage firm. It has its business...
asked 28 minutes ago -
How do we determine the ultimate radioactive decay product of
the uranium-238 series is lead?
asked 33 minutes ago -
> Women’s pulse rates are normally distributed with a mean of
68.5 beats per minute and...
asked 39 minutes ago -
Briefly describe an aspect of the strengths perspective that is
consistent with your own understanding of...
asked 41 minutes ago -
Step by step method of using Sparse Identification of Nonlinear
Dynamics (SINDy) to model your own...
asked 49 minutes ago -
3) What are the typical social structures in a global city?
asked 3 hours ago -
Luther Corporation
Consolidated Balance Sheet
December 31, 2019 and 2018 (in $ millions)
Assets
2019
2018...
asked 3 hours ago