
Homework Answers
Add Answer to:
1. Consider the following version of the equations for a pendulum with friction in R, *...
3. (6 marks) For b1,b2, 63, 64 € R, consider the linear system of equations +...
 3. (6 marks) For b1,b2, 63, 64 € R, consider the linear system of equations + 21 + 22 -11 + 22 23 624 = bi 3.13 + 2014 b2 23 + 2:04 b3 603 + 20:24 = 54 *) 21 + 2:01 + 4.22 where 11, 12, 13, 14 ER. (a) Find a system of equations that bı, b2, 63, 64 must satisfy in order for (+) to be consistent. bi [ must satisfy so (+) is (b) Using...
3. (6 marks) For b1,b2, 63, 64 € R, consider the linear system of equations + 21 + 22 -11 + 22 23 624 = bi 3.13 + 2014 b2 23 + 2:04 b3 603 + 20:24 = 54 *) 21 + 2:01 + 4.22 where 11, 12, 13, 14 ER. (a) Find a system of equations that bı, b2, 63, 64 must satisfy in order for (+) to be consistent. bi [ must satisfy so (+) is (b) Using...
4. Consider the pendulum with friction modeled by the second order ODE: where θ is the angle the ...
 4. please help with both parts a and b
4. Consider the pendulum with friction modeled by the second order ODE: where θ is the angle the pendulum makes with the vertical axis, α is a friction coefficient and w is the pendulum natural frequency. (a) Turn (4) into a first order system. (b) Use Euler method to find an approximation to the solution in [0,5] with initial conditions θ(0)-1 and θ'(0)-0. Take α-0.2 and w-2. Verify the expected order...
4. please help with both parts a and b
4. Consider the pendulum with friction modeled by the second order ODE: where θ is the angle the pendulum makes with the vertical axis, α is a friction coefficient and w is the pendulum natural frequency. (a) Turn (4) into a first order system. (b) Use Euler method to find an approximation to the solution in [0,5] with initial conditions θ(0)-1 and θ'(0)-0. Take α-0.2 and w-2. Verify the expected order...
Consider the inverted pendulum system presented in Fig. 1. The pivot of the pendulum is mounted o...
 Consider the inverted pendulum system presented in Fig. 1. The pivot of the pendulum is mounted on a cart, which can move in a horizontal direction. The pendulum can be kept balanced at a specific position by applying a horizontal force to drive the carriage. Assume that the pendulum mass, m, is concentrated ia at the end of the massless rod. The horizontal displacement of the pivot on the cart is x, the rotational angle of the pendulum is θ...
Consider the inverted pendulum system presented in Fig. 1. The pivot of the pendulum is mounted on a cart, which can move in a horizontal direction. The pendulum can be kept balanced at a specific position by applying a horizontal force to drive the carriage. Assume that the pendulum mass, m, is concentrated ia at the end of the massless rod. The horizontal displacement of the pivot on the cart is x, the rotational angle of the pendulum is θ...
Consider a system described by the following equations: · 1 = I1 – 2x122 + u,...
 Consider a system described by the following equations: · 1 = I1 – 2x122 + u, º2 = X122 – 22, where x = (x1, x2) is the state and u is an input. (a) Find all equilibrium points for u = 0. (b) For each equilibrium point x = (ū1, 72), find the linearization of the system about the equilibrium. Express your results in state- space form, ż= Az + Bu, where z=x-. Also give the output equation y=...
Consider a system described by the following equations: · 1 = I1 – 2x122 + u, º2 = X122 – 22, where x = (x1, x2) is the state and u is an input. (a) Find all equilibrium points for u = 0. (b) For each equilibrium point x = (ū1, 72), find the linearization of the system about the equilibrium. Express your results in state- space form, ż= Az + Bu, where z=x-. Also give the output equation y=...
. Consider the Furuta pendulum system; See Figure1 on the next page. The angle of the...
 . Consider the Furuta pendulum system; See Figure1 on the next page. The angle of the horizontal arm is denoted θ1 and the angle of the pendulum fron the vertically upward line is denoted θ2. Their corresponding angular velocities are denoted θ| and 02, respectively. The kinetic energy K and the potential energy V of the system are given by Vo COS in terms of some mechanical parameters Io, 111, 12, 112, Vo of the system that have all positive...
. Consider the Furuta pendulum system; See Figure1 on the next page. The angle of the horizontal arm is denoted θ1 and the angle of the pendulum fron the vertically upward line is denoted θ2. Their corresponding angular velocities are denoted θ| and 02, respectively. The kinetic energy K and the potential energy V of the system are given by Vo COS in terms of some mechanical parameters Io, 111, 12, 112, Vo of the system that have all positive...
Problem 2: Cart Standard Pendulum Model Consider the cart standard pendulum system shown in Figur...
 Problem 2: Cart Standard Pendulum Model Consider the cart standard pendulum system shown in Figure 1 with parameters given in Table 1 I C.8 I Ig Figure 1: Cart Standard Pendulum Schematic Syb Definition Unit Variablesr osition of the cart angle that the force applied on cart (control) mass of the cart mass ot t 123 lum makes with the vertic Parameters M5 kg utm 0.5 location of the c.g. of the pendulum above the 4 = m moment of...
Problem 2: Cart Standard Pendulum Model Consider the cart standard pendulum system shown in Figure 1 with parameters given in Table 1 I C.8 I Ig Figure 1: Cart Standard Pendulum Schematic Syb Definition Unit Variablesr osition of the cart angle that the force applied on cart (control) mass of the cart mass ot t 123 lum makes with the vertic Parameters M5 kg utm 0.5 location of the c.g. of the pendulum above the 4 = m moment of...
Problen /) Derive equations of motion of the system shown below in x and 0 by using Lagrange's method. The thin rigid rod of length is supported as a pendulum at end A, and has a mass m. The rod...
 Problen /) Derive equations of motion of the system shown below in x and 0 by using Lagrange's method. The thin rigid rod of length is supported as a pendulum at end A, and has a mass m. The rod is also pinned to a roller and held in place by two elastic springs with constants k .
Problen /) Derive equations of motion of the system shown below in x and 0 by using Lagrange's method. The thin rigid...
Problen /) Derive equations of motion of the system shown below in x and 0 by using Lagrange's method. The thin rigid rod of length is supported as a pendulum at end A, and has a mass m. The rod is also pinned to a roller and held in place by two elastic springs with constants k .
Problen /) Derive equations of motion of the system shown below in x and 0 by using Lagrange's method. The thin rigid...
Consider the second order equation r" + 2.3-r2-2x = 0. (a) Put y-', and transform the second orde...
 Consider the second order equation r" + 2.3-r2-2x = 0. (a) Put y-', and transform the second order equation into an equivalent system of first order equations for (x(t), y(t system Find al critical (equilibrium) points for the (b) For each critical point of the systern from part (a), use linearization to determine the local behaviour (if possible) and stability (if possible) of the critical point. Ski (lı ile 1",lobal phase portrait of the stem frolll pari a Dei ermine...
Consider the second order equation r" + 2.3-r2-2x = 0. (a) Put y-', and transform the second order equation into an equivalent system of first order equations for (x(t), y(t system Find al critical (equilibrium) points for the (b) For each critical point of the systern from part (a), use linearization to determine the local behaviour (if possible) and stability (if possible) of the critical point. Ski (lı ile 1",lobal phase portrait of the stem frolll pari a Dei ermine...
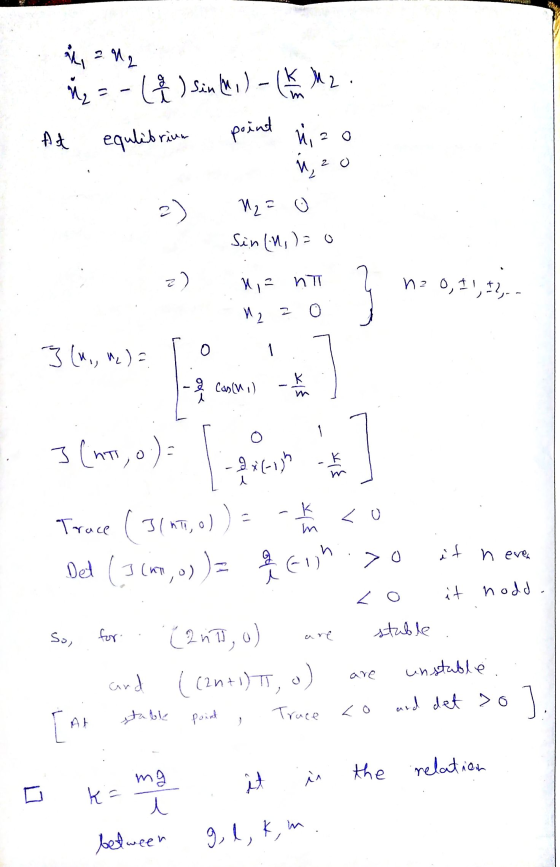
2. For the simple pendulum shown in Figure 2, the nonlinear equations of motion are given by θ(t)...
 do (b) and (c) only.
2. For the simple pendulum shown in Figure 2, the nonlinear equations of motion are given by θ(t) + 믈 sin θ(t) + m 0(t)-0 Pivot point L, length Massless rod , mass Figure 2. A simple pendulum 3. Consider again the pendulum of Figure 2 of problem 2 when g = 9.8 m/s, 1 = 4.9m, k =0.3, and (a) Determine whether the system is stable by finding the characteristic equation obtained from setting...
do (b) and (c) only.
2. For the simple pendulum shown in Figure 2, the nonlinear equations of motion are given by θ(t) + 믈 sin θ(t) + m 0(t)-0 Pivot point L, length Massless rod , mass Figure 2. A simple pendulum 3. Consider again the pendulum of Figure 2 of problem 2 when g = 9.8 m/s, 1 = 4.9m, k =0.3, and (a) Determine whether the system is stable by finding the characteristic equation obtained from setting...
A. Consider the characteristic equations below, comment on their system stability? 1. D(s)=s4 +253 +852 +...
 A. Consider the characteristic equations below, comment on their system stability? 1. D(s)=s4 +253 +852 + 4s + 3 2. D(s)=s5 +54 +353 +352 + 6s + 4 B. Find the range of values of K for the closed loop system to remain stable? R(s) C(s) K s(s? +5 +1)(8+3)(s+4)
A. Consider the characteristic equations below, comment on their system stability? 1. D(s)=s4 +253 +852 + 4s + 3 2. D(s)=s5 +54 +353 +352 + 6s + 4 B. Find the range of values of K for the closed loop system to remain stable? R(s) C(s) K s(s? +5 +1)(8+3)(s+4)
 3. (6 marks) For b1,b2, 63, 64 € R, consider the linear system of equations + 21 + 22 -11 + 22 23 624 = bi 3.13 + 2014 b2 23 + 2:04 b3 603 + 20:24 = 54 *) 21 + 2:01 + 4.22 where 11, 12, 13, 14 ER. (a) Find a system of equations that bı, b2, 63, 64 must satisfy in order for (+) to be consistent. bi [ must satisfy so (+) is (b) Using...
3. (6 marks) For b1,b2, 63, 64 € R, consider the linear system of equations + 21 + 22 -11 + 22 23 624 = bi 3.13 + 2014 b2 23 + 2:04 b3 603 + 20:24 = 54 *) 21 + 2:01 + 4.22 where 11, 12, 13, 14 ER. (a) Find a system of equations that bı, b2, 63, 64 must satisfy in order for (+) to be consistent. bi [ must satisfy so (+) is (b) Using...
 4. please help with both parts a and b
4. Consider the pendulum with friction modeled by the second order ODE: where θ is the angle the pendulum makes with the vertical axis, α is a friction coefficient and w is the pendulum natural frequency. (a) Turn (4) into a first order system. (b) Use Euler method to find an approximation to the solution in [0,5] with initial conditions θ(0)-1 and θ'(0)-0. Take α-0.2 and w-2. Verify the expected order...
4. please help with both parts a and b
4. Consider the pendulum with friction modeled by the second order ODE: where θ is the angle the pendulum makes with the vertical axis, α is a friction coefficient and w is the pendulum natural frequency. (a) Turn (4) into a first order system. (b) Use Euler method to find an approximation to the solution in [0,5] with initial conditions θ(0)-1 and θ'(0)-0. Take α-0.2 and w-2. Verify the expected order...
 Consider the inverted pendulum system presented in Fig. 1. The pivot of the pendulum is mounted on a cart, which can move in a horizontal direction. The pendulum can be kept balanced at a specific position by applying a horizontal force to drive the carriage. Assume that the pendulum mass, m, is concentrated ia at the end of the massless rod. The horizontal displacement of the pivot on the cart is x, the rotational angle of the pendulum is θ...
Consider the inverted pendulum system presented in Fig. 1. The pivot of the pendulum is mounted on a cart, which can move in a horizontal direction. The pendulum can be kept balanced at a specific position by applying a horizontal force to drive the carriage. Assume that the pendulum mass, m, is concentrated ia at the end of the massless rod. The horizontal displacement of the pivot on the cart is x, the rotational angle of the pendulum is θ...
 Consider a system described by the following equations: · 1 = I1 – 2x122 + u, º2 = X122 – 22, where x = (x1, x2) is the state and u is an input. (a) Find all equilibrium points for u = 0. (b) For each equilibrium point x = (ū1, 72), find the linearization of the system about the equilibrium. Express your results in state- space form, ż= Az + Bu, where z=x-. Also give the output equation y=...
Consider a system described by the following equations: · 1 = I1 – 2x122 + u, º2 = X122 – 22, where x = (x1, x2) is the state and u is an input. (a) Find all equilibrium points for u = 0. (b) For each equilibrium point x = (ū1, 72), find the linearization of the system about the equilibrium. Express your results in state- space form, ż= Az + Bu, where z=x-. Also give the output equation y=...
 . Consider the Furuta pendulum system; See Figure1 on the next page. The angle of the horizontal arm is denoted θ1 and the angle of the pendulum fron the vertically upward line is denoted θ2. Their corresponding angular velocities are denoted θ| and 02, respectively. The kinetic energy K and the potential energy V of the system are given by Vo COS in terms of some mechanical parameters Io, 111, 12, 112, Vo of the system that have all positive...
. Consider the Furuta pendulum system; See Figure1 on the next page. The angle of the horizontal arm is denoted θ1 and the angle of the pendulum fron the vertically upward line is denoted θ2. Their corresponding angular velocities are denoted θ| and 02, respectively. The kinetic energy K and the potential energy V of the system are given by Vo COS in terms of some mechanical parameters Io, 111, 12, 112, Vo of the system that have all positive...
 Problem 2: Cart Standard Pendulum Model Consider the cart standard pendulum system shown in Figure 1 with parameters given in Table 1 I C.8 I Ig Figure 1: Cart Standard Pendulum Schematic Syb Definition Unit Variablesr osition of the cart angle that the force applied on cart (control) mass of the cart mass ot t 123 lum makes with the vertic Parameters M5 kg utm 0.5 location of the c.g. of the pendulum above the 4 = m moment of...
Problem 2: Cart Standard Pendulum Model Consider the cart standard pendulum system shown in Figure 1 with parameters given in Table 1 I C.8 I Ig Figure 1: Cart Standard Pendulum Schematic Syb Definition Unit Variablesr osition of the cart angle that the force applied on cart (control) mass of the cart mass ot t 123 lum makes with the vertic Parameters M5 kg utm 0.5 location of the c.g. of the pendulum above the 4 = m moment of...
 Problen /) Derive equations of motion of the system shown below in x and 0 by using Lagrange's method. The thin rigid rod of length is supported as a pendulum at end A, and has a mass m. The rod is also pinned to a roller and held in place by two elastic springs with constants k .
Problen /) Derive equations of motion of the system shown below in x and 0 by using Lagrange's method. The thin rigid...
Problen /) Derive equations of motion of the system shown below in x and 0 by using Lagrange's method. The thin rigid rod of length is supported as a pendulum at end A, and has a mass m. The rod is also pinned to a roller and held in place by two elastic springs with constants k .
Problen /) Derive equations of motion of the system shown below in x and 0 by using Lagrange's method. The thin rigid...
 Consider the second order equation r" + 2.3-r2-2x = 0. (a) Put y-', and transform the second order equation into an equivalent system of first order equations for (x(t), y(t system Find al critical (equilibrium) points for the (b) For each critical point of the systern from part (a), use linearization to determine the local behaviour (if possible) and stability (if possible) of the critical point. Ski (lı ile 1",lobal phase portrait of the stem frolll pari a Dei ermine...
Consider the second order equation r" + 2.3-r2-2x = 0. (a) Put y-', and transform the second order equation into an equivalent system of first order equations for (x(t), y(t system Find al critical (equilibrium) points for the (b) For each critical point of the systern from part (a), use linearization to determine the local behaviour (if possible) and stability (if possible) of the critical point. Ski (lı ile 1",lobal phase portrait of the stem frolll pari a Dei ermine...
 do (b) and (c) only.
2. For the simple pendulum shown in Figure 2, the nonlinear equations of motion are given by θ(t) + 믈 sin θ(t) + m 0(t)-0 Pivot point L, length Massless rod , mass Figure 2. A simple pendulum 3. Consider again the pendulum of Figure 2 of problem 2 when g = 9.8 m/s, 1 = 4.9m, k =0.3, and (a) Determine whether the system is stable by finding the characteristic equation obtained from setting...
do (b) and (c) only.
2. For the simple pendulum shown in Figure 2, the nonlinear equations of motion are given by θ(t) + 믈 sin θ(t) + m 0(t)-0 Pivot point L, length Massless rod , mass Figure 2. A simple pendulum 3. Consider again the pendulum of Figure 2 of problem 2 when g = 9.8 m/s, 1 = 4.9m, k =0.3, and (a) Determine whether the system is stable by finding the characteristic equation obtained from setting...
 A. Consider the characteristic equations below, comment on their system stability? 1. D(s)=s4 +253 +852 + 4s + 3 2. D(s)=s5 +54 +353 +352 + 6s + 4 B. Find the range of values of K for the closed loop system to remain stable? R(s) C(s) K s(s? +5 +1)(8+3)(s+4)
A. Consider the characteristic equations below, comment on their system stability? 1. D(s)=s4 +253 +852 + 4s + 3 2. D(s)=s5 +54 +353 +352 + 6s + 4 B. Find the range of values of K for the closed loop system to remain stable? R(s) C(s) K s(s? +5 +1)(8+3)(s+4)
Most questions answered within 3 hours.
-
2) You are given the task of finding a representation for a
circle in a drawing...
asked 36 minutes ago -
STUDY QUESTION: Does use of diet drug fen-phen
(fenfluramine-phentermine) cause valvular heart disease?
HINT: Valvular heart...
asked 28 minutes ago -
1. An object weighing 40 N rests on a surface. The coefficient
of friction is 0.35....
asked 1 hour ago -
Investor company owns 35% of investee company voting stock and
accounts for the investment under the...
asked 2 hours ago -
The number of major faults on a randomly chosen 1 km stretch of
highway has a...
asked 3 hours ago -
Consider the competitive environment of Starbuck's, Progressive
Insurance, a manufacturing firm with low turnover, or a...
asked 4 hours ago -
3. Gains from trade
Consider two neighbouring island countries called Euphoria and
Contente. They each have...
asked 5 hours ago -
A business executive has the option to invest money in two
plans: Plan A guarantees that...
asked 8 hours ago -
Hello, can someone please help me answer this question?
How much heat is absorbed by a...
asked 8 hours ago -
. A marketing researcher conducted a survey of 25 shoppers
randomly selected at the local mall...
asked 8 hours ago -
Create an comprehensive response to the
following:
Antimicrobial agents work on a multitude of microbes (bacteria,...
asked 8 hours ago -
6.13 LAB: Step counter. Section 6.3.
A pedometer treats walking 2,000 steps as walking 1 mile....
asked 8 hours ago