
QUES 2!!!
Homework Answers

Add Answer to:
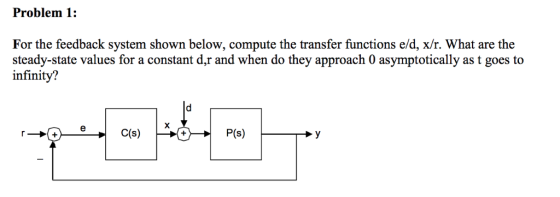
Problem 1: For the feedback system shown below, compute the transfer functions e/d, x/r. What are...
(19) For the unity feedback system whose transfer funcetion is shown below, deter- 19.) For the...
 (19) For the unity feedback system whose transfer funcetion is shown below, deter- 19.) For the unity feedback system whose transfer function is shown below, deter- mine the steady-state error for a: . Step input, rt) u(t) Ramp input, r(t) tul) 250 s(s 2Xs +5)
(19) For the unity feedback system whose transfer funcetion is shown below, deter- 19.) For the unity feedback system whose transfer function is shown below, deter- mine the steady-state error for a: . Step input, rt) u(t) Ramp input, r(t) tul) 250 s(s 2Xs +5)
Problem 3 (25) Consider the unity-feedback system with the open-loop transfer function: 10 G(s) = 1...
 Problem 3 (25) Consider the unity-feedback system with the open-loop transfer function: 10 G(s) = 1 Obtain the steady-state output of the system when it is subjected to each of the following inputs: a)r(t) sin(t30*) b) r(t) 2cos(2t - 45) c) r(t) sin(t+30") + 2cos(2t -45)
Problem 3 (25) Consider the unity-feedback system with the open-loop transfer function: 10 G(s) = 1 Obtain the steady-state output of the system when it is subjected to each of the following inputs: a)r(t)...
Problem 3 (25) Consider the unity-feedback system with the open-loop transfer function: 10 G(s) = 1 Obtain the steady-state output of the system when it is subjected to each of the following inputs: a)r(t) sin(t30*) b) r(t) 2cos(2t - 45) c) r(t) sin(t+30") + 2cos(2t -45)
Problem 3 (25) Consider the unity-feedback system with the open-loop transfer function: 10 G(s) = 1 Obtain the steady-state output of the system when it is subjected to each of the following inputs: a)r(t)...
Consider a plant with transfer function 5- Gp(s) = s2 Design a proper compensator Gc(s) and a gain p for the feedback system shown below so that the resulting system has all poles at s=-2, and the ou...
Consider a plant with transfer function 5- Gp(s) = s2 Design a proper compensator Gc(s) and a gain p for the feedback system shown below so that the resulting system has all poles at s=-2, and the output C(s) will track asymptotically any step reference input R(s). Find the resulting overall transfer function T(s) R(s) Consider a plant with transfer function 5- Gp(s) = s2 Design a proper compensator Gc(s) and a gain p for the feedback system shown below...
Q4. The feedback system shown below has a plant, a controller, and sensor transfer functions as...
 Q4. The feedback system shown below has a plant, a controller, and sensor transfer functions as G(s), Gc(s) and H(s), respectively. Find the output Y(s) and the input U(s) as a function of the inputs and transfer functions. (2 Points) D(s) R(s) + U(s) Gc (s) O G(s) - Y(s) H(S)
Q4. The feedback system shown below has a plant, a controller, and sensor transfer functions as G(s), Gc(s) and H(s), respectively. Find the output Y(s) and the input U(s) as a function of the inputs and transfer functions. (2 Points) D(s) R(s) + U(s) Gc (s) O G(s) - Y(s) H(S)
Problem #7 (10 points) For the feedback control system shown in figure (4), R) I. 2....
 Problem #7 (10 points) For the feedback control system shown in figure (4), R) I. 2. Determine the steady state error ess when K = 1 Determine the value of K to minimize the steady state error ess R(S) (s +2) 6+5 Figure (4) Problem #8 (10 points) For the feedback control system shown in figure (5, R(s)-ine the range of K such that the absolute value of the steady state error is less than 0.1 R(S) s+K Y(S) Figure...
Problem #7 (10 points) For the feedback control system shown in figure (4), R) I. 2. Determine the steady state error ess when K = 1 Determine the value of K to minimize the steady state error ess R(S) (s +2) 6+5 Figure (4) Problem #8 (10 points) For the feedback control system shown in figure (5, R(s)-ine the range of K such that the absolute value of the steady state error is less than 0.1 R(S) s+K Y(S) Figure...
Problem 3 A unity feedback system has the loop transfer function G(s) = Kata) s(s +...
 Problem 3 A unity feedback system has the loop transfer function G(s) = Kata) s(s + (a) Find the breakway and entry points on the real axis. (b) Find the gain and the roots when the real part of the complex roots is located at -2 (c) Sketch the root locus. Problem 4 The forward path G(s) of a unity feedback system with input R(s) and output Y (s) is given by G(o) 106I) (a) What is the type of...
Problem 3 A unity feedback system has the loop transfer function G(s) = Kata) s(s + (a) Find the breakway and entry points on the real axis. (b) Find the gain and the roots when the real part of the complex roots is located at -2 (c) Sketch the root locus. Problem 4 The forward path G(s) of a unity feedback system with input R(s) and output Y (s) is given by G(o) 106I) (a) What is the type of...
Problem 1 The following transfer functions are given for a single-loop unity- feedback (H(s)-1) and nonunity-...
 Problem 1 The following transfer functions are given for a single-loop unity- feedback (H(s)-1) and nonunity- feedback control system. Find the steady-state errors for both cases due to a unit-step input 1(t),a unit-ramp inputt1(t), and a parabolic input (t2/2)1() (a) Go)+2) (b) Go)5 H(s) = 5 a) G)+12) ( H(s)-5(s + 2) 2)
Problem 1 The following transfer functions are given for a single-loop unity- feedback (H(s)-1) and nonunity- feedback control system. Find the steady-state errors for both cases due to a unit-step input 1(t),a unit-ramp inputt1(t), and a parabolic input (t2/2)1() (a) Go)+2) (b) Go)5 H(s) = 5 a) G)+12) ( H(s)-5(s + 2) 2)
A unity feedback system is shown in Fig. 1. The closed-loop transfer function ?(?) of this...
 A unity feedback system is shown in Fig. 1. The closed-loop
transfer function ?(?) of this system is given as
?(?)=?1?4+2?3+(?2+1)?2+?2?+?1.
a) (20%) Using Routh-Hurwitz criteria, find expression (in
terms of ?1 and ?2) and range of value of ?1 and ?2 such that the
above system is stable.
b) (4%) It is desired to achieve steady-state error of less
than 0.3 with a unit ramp input. Find an additional constrain in
terms of ?1 and ?2 such that the...
A unity feedback system is shown in Fig. 1. The closed-loop
transfer function ?(?) of this system is given as
?(?)=?1?4+2?3+(?2+1)?2+?2?+?1.
a) (20%) Using Routh-Hurwitz criteria, find expression (in
terms of ?1 and ?2) and range of value of ?1 and ?2 such that the
above system is stable.
b) (4%) It is desired to achieve steady-state error of less
than 0.3 with a unit ramp input. Find an additional constrain in
terms of ?1 and ?2 such that the...
Problem 1: Steady-state error analvsis (a) A block diagram of a feedback control system is given ...
 The Class Name is: MAE 318 System Dynamics and Control I
Problem 1: Steady-state error analvsis (a) A block diagram of a feedback control system is given below. Assuming that the tunable constant Khas a value that makes this closed-loop system stable, find the steady-state error of the closed-loop system for (a a step reference input with amplitude R, r(t)- R u(t) (ii) a ramp reference input with slope R, r(t) = Rt-us(t) R(s) Y(s) (s+2)(s +5) (b) A block...
The Class Name is: MAE 318 System Dynamics and Control I
Problem 1: Steady-state error analvsis (a) A block diagram of a feedback control system is given below. Assuming that the tunable constant Khas a value that makes this closed-loop system stable, find the steady-state error of the closed-loop system for (a a step reference input with amplitude R, r(t)- R u(t) (ii) a ramp reference input with slope R, r(t) = Rt-us(t) R(s) Y(s) (s+2)(s +5) (b) A block...
Consider the unity-feedback system shown below: R(s) E(s) input: r(t), output: y(t) C(s) P(s) error: e()...
 Consider the unity-feedback system shown below: R(s) E(s) input: r(t), output: y(t) C(s) P(s) error: e() r(t) y(t) closed-loop transfer-function: Hyr(sD t the closed-loop transfer-function be Hyr(s) Y (s) R(s) Let the transfer-function of the plant be P(s) 10 s (s 1) (s 5) The open-loop transfer-function is G(s) P(s) C(s) DESIGN OBJECTIVES: Find a controller C(s) such that the following are satisfied i) The closed-loop system is stable. ii) The steady-state error ess due to a unit-ramp input r(t)...
Consider the unity-feedback system shown below: R(s) E(s) input: r(t), output: y(t) C(s) P(s) error: e() r(t) y(t) closed-loop transfer-function: Hyr(sD t the closed-loop transfer-function be Hyr(s) Y (s) R(s) Let the transfer-function of the plant be P(s) 10 s (s 1) (s 5) The open-loop transfer-function is G(s) P(s) C(s) DESIGN OBJECTIVES: Find a controller C(s) such that the following are satisfied i) The closed-loop system is stable. ii) The steady-state error ess due to a unit-ramp input r(t)...
 (19) For the unity feedback system whose transfer funcetion is shown below, deter- 19.) For the unity feedback system whose transfer function is shown below, deter- mine the steady-state error for a: . Step input, rt) u(t) Ramp input, r(t) tul) 250 s(s 2Xs +5)
(19) For the unity feedback system whose transfer funcetion is shown below, deter- 19.) For the unity feedback system whose transfer function is shown below, deter- mine the steady-state error for a: . Step input, rt) u(t) Ramp input, r(t) tul) 250 s(s 2Xs +5)
 Problem 3 (25) Consider the unity-feedback system with the open-loop transfer function: 10 G(s) = 1 Obtain the steady-state output of the system when it is subjected to each of the following inputs: a)r(t) sin(t30*) b) r(t) 2cos(2t - 45) c) r(t) sin(t+30") + 2cos(2t -45)
Problem 3 (25) Consider the unity-feedback system with the open-loop transfer function: 10 G(s) = 1 Obtain the steady-state output of the system when it is subjected to each of the following inputs: a)r(t)...
Problem 3 (25) Consider the unity-feedback system with the open-loop transfer function: 10 G(s) = 1 Obtain the steady-state output of the system when it is subjected to each of the following inputs: a)r(t) sin(t30*) b) r(t) 2cos(2t - 45) c) r(t) sin(t+30") + 2cos(2t -45)
Problem 3 (25) Consider the unity-feedback system with the open-loop transfer function: 10 G(s) = 1 Obtain the steady-state output of the system when it is subjected to each of the following inputs: a)r(t)...
 Q4. The feedback system shown below has a plant, a controller, and sensor transfer functions as G(s), Gc(s) and H(s), respectively. Find the output Y(s) and the input U(s) as a function of the inputs and transfer functions. (2 Points) D(s) R(s) + U(s) Gc (s) O G(s) - Y(s) H(S)
Q4. The feedback system shown below has a plant, a controller, and sensor transfer functions as G(s), Gc(s) and H(s), respectively. Find the output Y(s) and the input U(s) as a function of the inputs and transfer functions. (2 Points) D(s) R(s) + U(s) Gc (s) O G(s) - Y(s) H(S)
 Problem #7 (10 points) For the feedback control system shown in figure (4), R) I. 2. Determine the steady state error ess when K = 1 Determine the value of K to minimize the steady state error ess R(S) (s +2) 6+5 Figure (4) Problem #8 (10 points) For the feedback control system shown in figure (5, R(s)-ine the range of K such that the absolute value of the steady state error is less than 0.1 R(S) s+K Y(S) Figure...
Problem #7 (10 points) For the feedback control system shown in figure (4), R) I. 2. Determine the steady state error ess when K = 1 Determine the value of K to minimize the steady state error ess R(S) (s +2) 6+5 Figure (4) Problem #8 (10 points) For the feedback control system shown in figure (5, R(s)-ine the range of K such that the absolute value of the steady state error is less than 0.1 R(S) s+K Y(S) Figure...
 Problem 3 A unity feedback system has the loop transfer function G(s) = Kata) s(s + (a) Find the breakway and entry points on the real axis. (b) Find the gain and the roots when the real part of the complex roots is located at -2 (c) Sketch the root locus. Problem 4 The forward path G(s) of a unity feedback system with input R(s) and output Y (s) is given by G(o) 106I) (a) What is the type of...
Problem 3 A unity feedback system has the loop transfer function G(s) = Kata) s(s + (a) Find the breakway and entry points on the real axis. (b) Find the gain and the roots when the real part of the complex roots is located at -2 (c) Sketch the root locus. Problem 4 The forward path G(s) of a unity feedback system with input R(s) and output Y (s) is given by G(o) 106I) (a) What is the type of...
 Problem 1 The following transfer functions are given for a single-loop unity- feedback (H(s)-1) and nonunity- feedback control system. Find the steady-state errors for both cases due to a unit-step input 1(t),a unit-ramp inputt1(t), and a parabolic input (t2/2)1() (a) Go)+2) (b) Go)5 H(s) = 5 a) G)+12) ( H(s)-5(s + 2) 2)
Problem 1 The following transfer functions are given for a single-loop unity- feedback (H(s)-1) and nonunity- feedback control system. Find the steady-state errors for both cases due to a unit-step input 1(t),a unit-ramp inputt1(t), and a parabolic input (t2/2)1() (a) Go)+2) (b) Go)5 H(s) = 5 a) G)+12) ( H(s)-5(s + 2) 2)
 A unity feedback system is shown in Fig. 1. The closed-loop
transfer function ?(?) of this system is given as
?(?)=?1?4+2?3+(?2+1)?2+?2?+?1.
a) (20%) Using Routh-Hurwitz criteria, find expression (in
terms of ?1 and ?2) and range of value of ?1 and ?2 such that the
above system is stable.
b) (4%) It is desired to achieve steady-state error of less
than 0.3 with a unit ramp input. Find an additional constrain in
terms of ?1 and ?2 such that the...
A unity feedback system is shown in Fig. 1. The closed-loop
transfer function ?(?) of this system is given as
?(?)=?1?4+2?3+(?2+1)?2+?2?+?1.
a) (20%) Using Routh-Hurwitz criteria, find expression (in
terms of ?1 and ?2) and range of value of ?1 and ?2 such that the
above system is stable.
b) (4%) It is desired to achieve steady-state error of less
than 0.3 with a unit ramp input. Find an additional constrain in
terms of ?1 and ?2 such that the...
 The Class Name is: MAE 318 System Dynamics and Control I
Problem 1: Steady-state error analvsis (a) A block diagram of a feedback control system is given below. Assuming that the tunable constant Khas a value that makes this closed-loop system stable, find the steady-state error of the closed-loop system for (a a step reference input with amplitude R, r(t)- R u(t) (ii) a ramp reference input with slope R, r(t) = Rt-us(t) R(s) Y(s) (s+2)(s +5) (b) A block...
The Class Name is: MAE 318 System Dynamics and Control I
Problem 1: Steady-state error analvsis (a) A block diagram of a feedback control system is given below. Assuming that the tunable constant Khas a value that makes this closed-loop system stable, find the steady-state error of the closed-loop system for (a a step reference input with amplitude R, r(t)- R u(t) (ii) a ramp reference input with slope R, r(t) = Rt-us(t) R(s) Y(s) (s+2)(s +5) (b) A block...
 Consider the unity-feedback system shown below: R(s) E(s) input: r(t), output: y(t) C(s) P(s) error: e() r(t) y(t) closed-loop transfer-function: Hyr(sD t the closed-loop transfer-function be Hyr(s) Y (s) R(s) Let the transfer-function of the plant be P(s) 10 s (s 1) (s 5) The open-loop transfer-function is G(s) P(s) C(s) DESIGN OBJECTIVES: Find a controller C(s) such that the following are satisfied i) The closed-loop system is stable. ii) The steady-state error ess due to a unit-ramp input r(t)...
Consider the unity-feedback system shown below: R(s) E(s) input: r(t), output: y(t) C(s) P(s) error: e() r(t) y(t) closed-loop transfer-function: Hyr(sD t the closed-loop transfer-function be Hyr(s) Y (s) R(s) Let the transfer-function of the plant be P(s) 10 s (s 1) (s 5) The open-loop transfer-function is G(s) P(s) C(s) DESIGN OBJECTIVES: Find a controller C(s) such that the following are satisfied i) The closed-loop system is stable. ii) The steady-state error ess due to a unit-ramp input r(t)...
Most questions answered within 3 hours.
-
At the beginning of the period, the Fabricating Department
budgeted direct labor of $136,500 and equipment...
asked 21 seconds ago -
PARTS A-D HAVE BEEN ANSWERED. WAS TOLD TO REPOST. ONLY ANSWER
PARTS E and F.
A...
asked 17 minutes ago -
2) You are given the task of finding a representation for a
circle in a drawing...
asked 1 hour ago -
STUDY QUESTION: Does use of diet drug fen-phen
(fenfluramine-phentermine) cause valvular heart disease?
HINT: Valvular heart...
asked 1 hour ago -
1. An object weighing 40 N rests on a surface. The coefficient
of friction is 0.35....
asked 2 hours ago -
Investor company owns 35% of investee company voting stock and
accounts for the investment under the...
asked 3 hours ago -
The number of major faults on a randomly chosen 1 km stretch of
highway has a...
asked 4 hours ago -
Consider the competitive environment of Starbuck's, Progressive
Insurance, a manufacturing firm with low turnover, or a...
asked 4 hours ago -
3. Gains from trade
Consider two neighbouring island countries called Euphoria and
Contente. They each have...
asked 6 hours ago -
A business executive has the option to invest money in two
plans: Plan A guarantees that...
asked 9 hours ago -
Hello, can someone please help me answer this question?
How much heat is absorbed by a...
asked 9 hours ago -
. A marketing researcher conducted a survey of 25 shoppers
randomly selected at the local mall...
asked 9 hours ago