
Homework Answers

Add Answer to:
Question 6. 30) Design a controller for the following open loop transfer function to achieve a da...
PD & PID controller design Consider a unity feedback system with open loop transfer function, G(s)...
 PD & PID controller design Consider a unity feedback system with open loop transfer function, G(s) = 20/s(s+2)(8+4). Design a PD controller so that the closed loop has a damping ratio of 0.8 and natural frequency of oscillation as 2 rad/sec. b) 100 Consider a unity feedback system with open loop transfer function, aus. Design a PID controller, so that the phase margin of (S-1) (s + 2) (s+10) the system is 45° at a frequency of 4 rad/scc and...
PD & PID controller design Consider a unity feedback system with open loop transfer function, G(s) = 20/s(s+2)(8+4). Design a PD controller so that the closed loop has a damping ratio of 0.8 and natural frequency of oscillation as 2 rad/sec. b) 100 Consider a unity feedback system with open loop transfer function, aus. Design a PID controller, so that the phase margin of (S-1) (s + 2) (s+10) the system is 45° at a frequency of 4 rad/scc and...
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller trans...
 Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
K and consider a PI s+4 A unity feedback system has an open loop transfer function G(s) [4] S+a controller Ge(s) S Sele...
 K and consider a PI s+4 A unity feedback system has an open loop transfer function G(s) [4] S+a controller Ge(s) S Select the values of K and a to achieve a) (i) Peak overshoot of about 20% (ii) Settling time (2% bases) ~ 1 sec b) For the values of K and a found in part (a), calculate the unit ramp input steady state error
K and consider a PI s+4 A unity feedback system has an open loop...
K and consider a PI s+4 A unity feedback system has an open loop transfer function G(s) [4] S+a controller Ge(s) S Select the values of K and a to achieve a) (i) Peak overshoot of about 20% (ii) Settling time (2% bases) ~ 1 sec b) For the values of K and a found in part (a), calculate the unit ramp input steady state error
K and consider a PI s+4 A unity feedback system has an open loop...
Question #4 (25 points): Consider the open loop system that has the following transfer function 1 G(S) = 10s+ 35 Us...
 Question #4 (25 points): Consider the open loop system that has the following transfer function 1 G(S) = 10s+ 35 Using Matlab: a) Plot the step response of the open loop system and note the settling time and steady state 15 pts error. b) Add proportional control K 300 and simulate the step response of the closed loop 15 pts system. Note the settling time, %OS and steady state error. c) Add proportional derivate control Kp 300, Ko 10 and...
Question #4 (25 points): Consider the open loop system that has the following transfer function 1 G(S) = 10s+ 35 Using Matlab: a) Plot the step response of the open loop system and note the settling time and steady state 15 pts error. b) Add proportional control K 300 and simulate the step response of the closed loop 15 pts system. Note the settling time, %OS and steady state error. c) Add proportional derivate control Kp 300, Ko 10 and...
b) Given a second order system with the following open loop transfer function where damping ratio,...
 b) Given a second order system with the following open loop transfer function where damping ratio, } = 0.707 and natural frequency, Wn= 2.5. wn? G(S) = S2 + 23wns +wn? i. Determine the steady state error to an appropriate input via a calculation method using the transfer function. Compare your answer with the steady state error from the exact frequency response for this system given in Figure Q4(b). (5 marks) ii. Evaluate the difference of the exact frequency response...
b) Given a second order system with the following open loop transfer function where damping ratio, } = 0.707 and natural frequency, Wn= 2.5. wn? G(S) = S2 + 23wns +wn? i. Determine the steady state error to an appropriate input via a calculation method using the transfer function. Compare your answer with the steady state error from the exact frequency response for this system given in Figure Q4(b). (5 marks) ii. Evaluate the difference of the exact frequency response...
Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%....
 Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
17. Consider unity feedback system with uncompensated forward transfer function a given by: K G(s) s+3)(s 6) The system...
 17. Consider unity feedback system with uncompensated forward transfer function a given by: K G(s) s+3)(s 6) The system requires a damping ratio of 0.5. If the design point is at -1.54 j2.66, design a PI controller to drive the steady-state error of the response to zero
17. Consider unity feedback system with uncompensated forward transfer function a given by: K G(s) s+3)(s 6) The system requires a damping ratio of 0.5. If the design point is at -1.54 j2.66,...
17. Consider unity feedback system with uncompensated forward transfer function a given by: K G(s) s+3)(s 6) The system requires a damping ratio of 0.5. If the design point is at -1.54 j2.66, design a PI controller to drive the steady-state error of the response to zero
17. Consider unity feedback system with uncompensated forward transfer function a given by: K G(s) s+3)(s 6) The system requires a damping ratio of 0.5. If the design point is at -1.54 j2.66,...
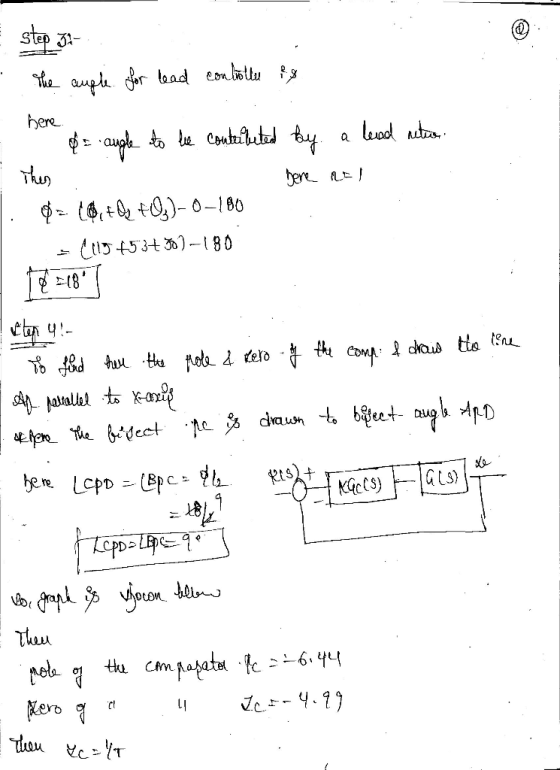
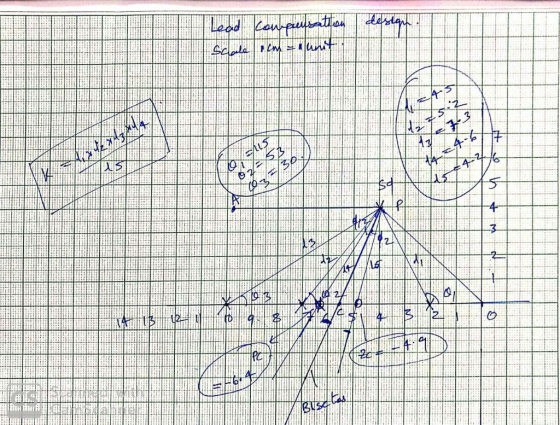
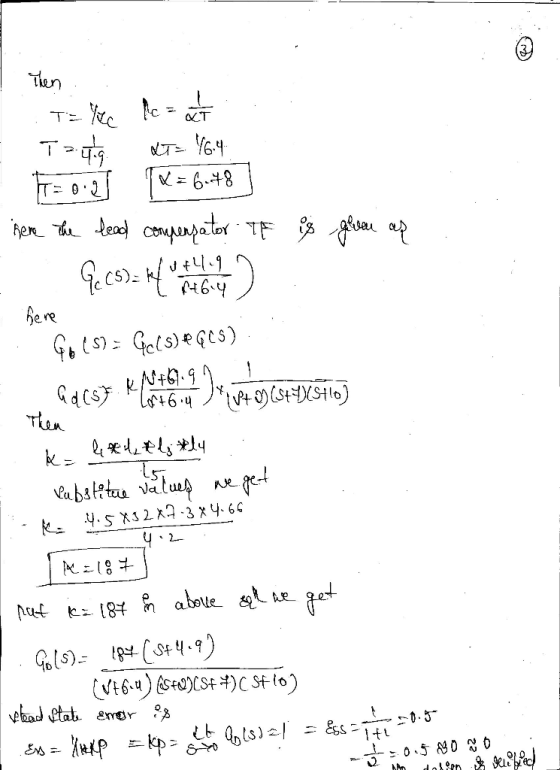
show steps please 10 A second-order open-loop system with transfer function G(s) = is to be...
 show steps please
10 A second-order open-loop system with transfer function G(s) = is to be $2+45+10 controlled with unity negative feedback. (a) Derive the error transfer functions E(s) of the closed-loop system subjected to a unit step input, when using a P controller and a PI controller, respectively, in terms P control gain kp, and PI control gains kp and ki, respectively. [7] (b) Determine the steady-state errors in (a). Briefly comment on the differences in control performance by...
show steps please
10 A second-order open-loop system with transfer function G(s) = is to be $2+45+10 controlled with unity negative feedback. (a) Derive the error transfer functions E(s) of the closed-loop system subjected to a unit step input, when using a P controller and a PI controller, respectively, in terms P control gain kp, and PI control gains kp and ki, respectively. [7] (b) Determine the steady-state errors in (a). Briefly comment on the differences in control performance by...
I have no more posting for this month, please solve these for me thanks 1. Given...
 I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
A uncompensated (un-controlled) feedback system with and plant transfer function are shown below. Design a PI...
 A uncompensated (un-controlled) feedback system with and plant
transfer function are shown below. Design a PI controller that you
could add that will drive the steady-state error to zero for a
unity step reference, and operate with a damping ratio of 0.5.
Provide the resulting %OS, and 2% settling time. You must show the
analytical process and all steps you took to design your
controller.
Use MATLAB/Simulink to simulate the system and your feed-back
controller for a unity step input...
A uncompensated (un-controlled) feedback system with and plant
transfer function are shown below. Design a PI controller that you
could add that will drive the steady-state error to zero for a
unity step reference, and operate with a damping ratio of 0.5.
Provide the resulting %OS, and 2% settling time. You must show the
analytical process and all steps you took to design your
controller.
Use MATLAB/Simulink to simulate the system and your feed-back
controller for a unity step input...
 PD & PID controller design Consider a unity feedback system with open loop transfer function, G(s) = 20/s(s+2)(8+4). Design a PD controller so that the closed loop has a damping ratio of 0.8 and natural frequency of oscillation as 2 rad/sec. b) 100 Consider a unity feedback system with open loop transfer function, aus. Design a PID controller, so that the phase margin of (S-1) (s + 2) (s+10) the system is 45° at a frequency of 4 rad/scc and...
PD & PID controller design Consider a unity feedback system with open loop transfer function, G(s) = 20/s(s+2)(8+4). Design a PD controller so that the closed loop has a damping ratio of 0.8 and natural frequency of oscillation as 2 rad/sec. b) 100 Consider a unity feedback system with open loop transfer function, aus. Design a PID controller, so that the phase margin of (S-1) (s + 2) (s+10) the system is 45° at a frequency of 4 rad/scc and...
 Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
 K and consider a PI s+4 A unity feedback system has an open loop transfer function G(s) [4] S+a controller Ge(s) S Select the values of K and a to achieve a) (i) Peak overshoot of about 20% (ii) Settling time (2% bases) ~ 1 sec b) For the values of K and a found in part (a), calculate the unit ramp input steady state error
K and consider a PI s+4 A unity feedback system has an open loop...
K and consider a PI s+4 A unity feedback system has an open loop transfer function G(s) [4] S+a controller Ge(s) S Select the values of K and a to achieve a) (i) Peak overshoot of about 20% (ii) Settling time (2% bases) ~ 1 sec b) For the values of K and a found in part (a), calculate the unit ramp input steady state error
K and consider a PI s+4 A unity feedback system has an open loop...
 Question #4 (25 points): Consider the open loop system that has the following transfer function 1 G(S) = 10s+ 35 Using Matlab: a) Plot the step response of the open loop system and note the settling time and steady state 15 pts error. b) Add proportional control K 300 and simulate the step response of the closed loop 15 pts system. Note the settling time, %OS and steady state error. c) Add proportional derivate control Kp 300, Ko 10 and...
Question #4 (25 points): Consider the open loop system that has the following transfer function 1 G(S) = 10s+ 35 Using Matlab: a) Plot the step response of the open loop system and note the settling time and steady state 15 pts error. b) Add proportional control K 300 and simulate the step response of the closed loop 15 pts system. Note the settling time, %OS and steady state error. c) Add proportional derivate control Kp 300, Ko 10 and...
 b) Given a second order system with the following open loop transfer function where damping ratio, } = 0.707 and natural frequency, Wn= 2.5. wn? G(S) = S2 + 23wns +wn? i. Determine the steady state error to an appropriate input via a calculation method using the transfer function. Compare your answer with the steady state error from the exact frequency response for this system given in Figure Q4(b). (5 marks) ii. Evaluate the difference of the exact frequency response...
b) Given a second order system with the following open loop transfer function where damping ratio, } = 0.707 and natural frequency, Wn= 2.5. wn? G(S) = S2 + 23wns +wn? i. Determine the steady state error to an appropriate input via a calculation method using the transfer function. Compare your answer with the steady state error from the exact frequency response for this system given in Figure Q4(b). (5 marks) ii. Evaluate the difference of the exact frequency response...
 Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
 17. Consider unity feedback system with uncompensated forward transfer function a given by: K G(s) s+3)(s 6) The system requires a damping ratio of 0.5. If the design point is at -1.54 j2.66, design a PI controller to drive the steady-state error of the response to zero
17. Consider unity feedback system with uncompensated forward transfer function a given by: K G(s) s+3)(s 6) The system requires a damping ratio of 0.5. If the design point is at -1.54 j2.66,...
17. Consider unity feedback system with uncompensated forward transfer function a given by: K G(s) s+3)(s 6) The system requires a damping ratio of 0.5. If the design point is at -1.54 j2.66, design a PI controller to drive the steady-state error of the response to zero
17. Consider unity feedback system with uncompensated forward transfer function a given by: K G(s) s+3)(s 6) The system requires a damping ratio of 0.5. If the design point is at -1.54 j2.66,...
 show steps please
10 A second-order open-loop system with transfer function G(s) = is to be $2+45+10 controlled with unity negative feedback. (a) Derive the error transfer functions E(s) of the closed-loop system subjected to a unit step input, when using a P controller and a PI controller, respectively, in terms P control gain kp, and PI control gains kp and ki, respectively. [7] (b) Determine the steady-state errors in (a). Briefly comment on the differences in control performance by...
show steps please
10 A second-order open-loop system with transfer function G(s) = is to be $2+45+10 controlled with unity negative feedback. (a) Derive the error transfer functions E(s) of the closed-loop system subjected to a unit step input, when using a P controller and a PI controller, respectively, in terms P control gain kp, and PI control gains kp and ki, respectively. [7] (b) Determine the steady-state errors in (a). Briefly comment on the differences in control performance by...
 I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
 A uncompensated (un-controlled) feedback system with and plant
transfer function are shown below. Design a PI controller that you
could add that will drive the steady-state error to zero for a
unity step reference, and operate with a damping ratio of 0.5.
Provide the resulting %OS, and 2% settling time. You must show the
analytical process and all steps you took to design your
controller.
Use MATLAB/Simulink to simulate the system and your feed-back
controller for a unity step input...
A uncompensated (un-controlled) feedback system with and plant
transfer function are shown below. Design a PI controller that you
could add that will drive the steady-state error to zero for a
unity step reference, and operate with a damping ratio of 0.5.
Provide the resulting %OS, and 2% settling time. You must show the
analytical process and all steps you took to design your
controller.
Use MATLAB/Simulink to simulate the system and your feed-back
controller for a unity step input...
Most questions answered within 3 hours.
-
You are helping the CFO of a manufacturing company assess
whether the firm should embark on...
asked 1 minute ago -
a) Given these data for the reaction , write the rate-law
expression.
(Use k for the...
asked 5 minutes ago -
Choose an enzyme and tell its function and what substrate it
works on.
asked 5 minutes ago -
How many moles of oxygen would be consumed during the aerobic
oxidation of one mole of...
asked 6 minutes ago -
Compare two countries how the culture
of those country enhances or impedes your understanding of the...
asked 7 minutes ago -
Identify the incorrect statement.
A. An increase in mol does not increase the average force of...
asked 8 minutes ago -
In broadcast authentication, a senderaims to send
oneauthentication code for multiple receivers to verify. Explain
why...
asked 8 minutes ago -
A student studying for a vocabulary test knows the meanings of
16 words from a list...
asked 40 minutes ago -
List the most common organic functional groups that function as
acids or bases. Write an equation...
asked 21 minutes ago -
1) A protein is 435 amino acids long, which of the genes below
COULD NOT code...
asked 23 minutes ago -
What do the phenomena of overshadowing, the CS preexposure
effect, and relative validity of cues have...
asked 51 minutes ago -
Assuming air has a density of 1.17 g/L and .973 atm what is the
average molar...
asked 45 minutes ago