
Homework Answers
Add Answer to:
2. Consider the system described by the ODE's 2x1-3x2 +4u Using the State Function of Pontryagin ...
1. Consider the system described by the ODE's X1 = X2 i,--2x,-3x2 +11 Using the State Function of...
 Write neatly please =)
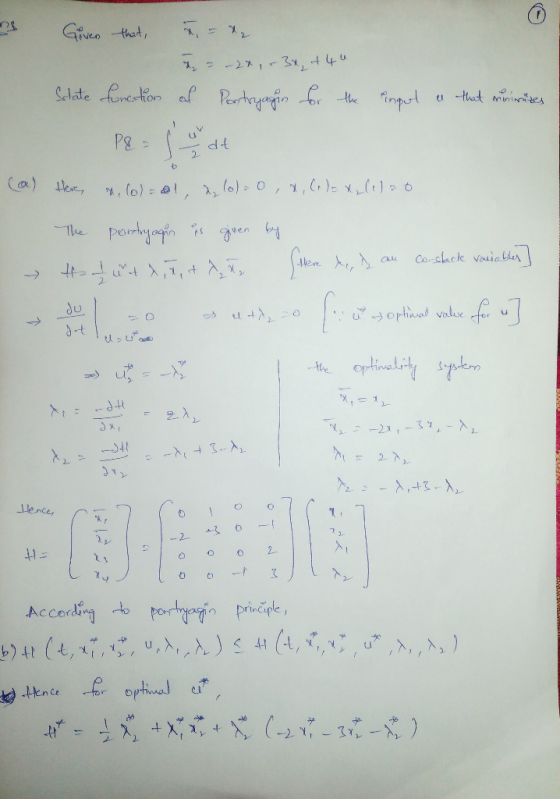
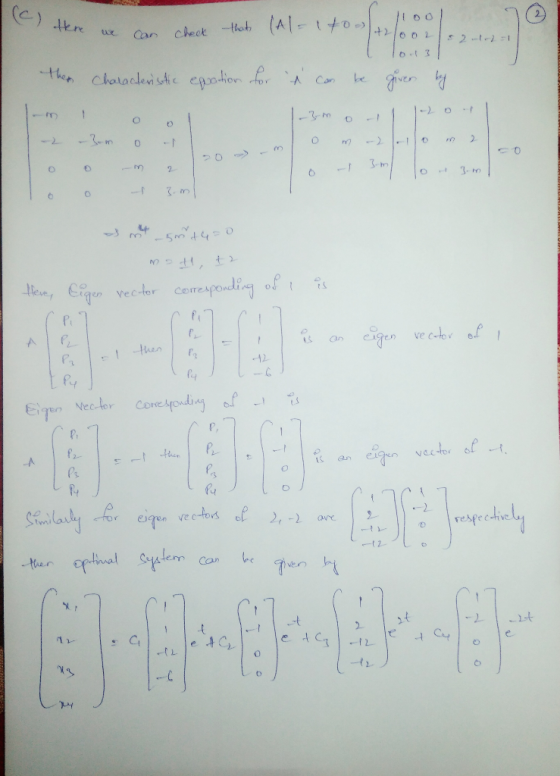
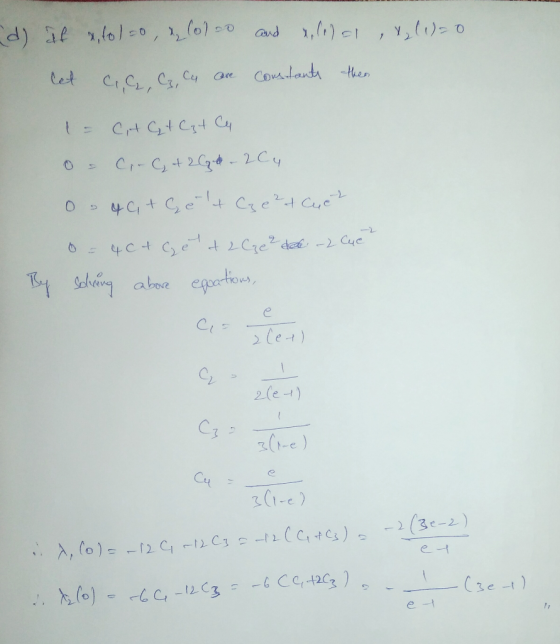
1. Consider the system described by the ODE's X1 = X2 i,--2x,-3x2 +11 Using the State Function of Pontryagin to find the input u that minimizes u2 a. Determine the state function of Pontryagin H b. Find the optimal input and Ho c. Find the matrix A that will yield the governing equations Xy x2 12 If X1 (0) = 1,x2(0)=0 and x1(1)-x-(1)=0 determine the govern equations for λ! (0) and d. (0) in terms of...
Write neatly please =)
1. Consider the system described by the ODE's X1 = X2 i,--2x,-3x2 +11 Using the State Function of Pontryagin to find the input u that minimizes u2 a. Determine the state function of Pontryagin H b. Find the optimal input and Ho c. Find the matrix A that will yield the governing equations Xy x2 12 If X1 (0) = 1,x2(0)=0 and x1(1)-x-(1)=0 determine the govern equations for λ! (0) and d. (0) in terms of...
8. Consider the system where the performance of the system is given by V -d a. Find the state function of Pontryagin H. b. Using the state function determine the optimal input c. Determine the eq...
 8. Consider the system where the performance of the system is given by V -d a. Find the state function of Pontryagin H. b. Using the state function determine the optimal input c. Determine the equations governing λ and x. d. Determine u°()given x(0)-0 and x(1) I
8. Consider the system where the performance of the system is given by V -d a. Find the state function of Pontryagin H. b. Using the state function determine the optimal input c....
8. Consider the system where the performance of the system is given by V -d a. Find the state function of Pontryagin H. b. Using the state function determine the optimal input c. Determine the equations governing λ and x. d. Determine u°()given x(0)-0 and x(1) I
8. Consider the system where the performance of the system is given by V -d a. Find the state function of Pontryagin H. b. Using the state function determine the optimal input c....
Problem 13.13. Consider the system of three linear differential equations: xt = 2x1 + 3x2 +...
 Problem 13.13. Consider the system of three linear differential equations: xt = 2x1 + 3x2 + 4.13 where the unknowns are the three functions xi(t), x2(t), and 23(t). x'a = 2x2 + 6.13 (a) Write the system in the form x' = Ax, where A is a (3 x 3) matrix. X'z = 2x3 (b) Write A as the sum of two matrices, A=D+U, where D is a diagonal matrix (all of the off-diagonal entries are zero, and the diagonal...
Problem 13.13. Consider the system of three linear differential equations: xt = 2x1 + 3x2 + 4.13 where the unknowns are the three functions xi(t), x2(t), and 23(t). x'a = 2x2 + 6.13 (a) Write the system in the form x' = Ax, where A is a (3 x 3) matrix. X'z = 2x3 (b) Write A as the sum of two matrices, A=D+U, where D is a diagonal matrix (all of the off-diagonal entries are zero, and the diagonal...
UestionI. A system is represented by the following transfer function G(s)- (s+1)/(s2+5s+6) 1) Fin...
 uestionI. A system is represented by the following transfer function G(s)- (s+1)/(s2+5s+6) 1) Find a state equation and state transition matrices (A,B, C and D) of the system for a step input 6u(t). ii) Find the state transition matrix eAt) ii) Find the output response of system y(t) to a step input 6u(t) using state transition matrix, iv) Obtain the output response y(t) of the system with two other methods for step input óu(t). Question IV. A system is described...
uestionI. A system is represented by the following transfer function G(s)- (s+1)/(s2+5s+6) 1) Find a state equation and state transition matrices (A,B, C and D) of the system for a step input 6u(t). ii) Find the state transition matrix eAt) ii) Find the output response of system y(t) to a step input 6u(t) using state transition matrix, iv) Obtain the output response y(t) of the system with two other methods for step input óu(t). Question IV. A system is described...
3. (l’+2° +1²=4') Topic: Laplace transform, CT system described by differential equations, LTI system properties. Consider...
 3. (l’+2° +1²=4') Topic: Laplace transform, CT system described by differential equations, LTI system properties. Consider a differential equation system for which the input x(t) and output y(t) are related by the differential equation d’y(t) dy(t) -6y(t) = 5x(t). dt dt Assume that the system is initially at rest. a) Determine the transfer function. b) Specify the ROC of H(s) and justify it. c) Determine the system impulse response h(t).
3. (l’+2° +1²=4') Topic: Laplace transform, CT system described by differential equations, LTI system properties. Consider a differential equation system for which the input x(t) and output y(t) are related by the differential equation d’y(t) dy(t) -6y(t) = 5x(t). dt dt Assume that the system is initially at rest. a) Determine the transfer function. b) Specify the ROC of H(s) and justify it. c) Determine the system impulse response h(t).
Consider a mass-spring-damper system whose motion is described by the following system of differe...
 Consider a mass-spring-damper system whose motion is described by the following system of differentiat equations [c1(f-k)+k,(f-х)-c2(x-9), f=f(t), y:' y(t) with x=x( t), where the function fit) is the input displacement function (known), while xit) and yt) are the two generalized coordinates (both unknown) of the mass-spring-damper systenm. 1. Identify the type of equations (e.g. H/NH, ODE/PDE, L/NL, order, type of coefficients, etc.J. 2. Express this system of differential equations in matrix form, assume f 0 and then determine its general...
Consider a mass-spring-damper system whose motion is described by the following system of differentiat equations [c1(f-k)+k,(f-х)-c2(x-9), f=f(t), y:' y(t) with x=x( t), where the function fit) is the input displacement function (known), while xit) and yt) are the two generalized coordinates (both unknown) of the mass-spring-damper systenm. 1. Identify the type of equations (e.g. H/NH, ODE/PDE, L/NL, order, type of coefficients, etc.J. 2. Express this system of differential equations in matrix form, assume f 0 and then determine its general...
ote: Show all of your wo 1- A closed-loop system is described by the state equations...
 ote: Show all of your wo 1- A closed-loop system is described by the state equations x(t)-|-(5+α) . -8 | x(t) + 1 1」 u(t), y(t)= [6 0] x(t) a) Find the state transition matrix Ф (t) b) Determine the transfer function T(s) = Y(s) / U(s)
ote: Show all of your wo 1- A closed-loop system is described by the state equations x(t)-|-(5+α) . -8 | x(t) + 1 1」 u(t), y(t)= [6 0] x(t) a) Find the state transition matrix Ф (t) b) Determine the transfer function T(s) = Y(s) / U(s)
1. Consider the system described by: *(t) - 6 m (0) + veu(t): y(t) = 01...
 1. Consider the system described by: *(t) - 6 m (0) + veu(t): y(t) = 01 (1) 60 = {1, 1421 a) Find the state transition matrix and the impulse response matrix of the system. b) Determine whether the system is (i) completely state controllable, (ii) differentially control- lable, (iii) instantaneously controllable, (iv) stabilizable at time to = 0. c) Repeat part (b) for to = 1. d) Determine whether the system is (i) observable, (ii) differentially observable, (iii) instanta-...
1. Consider the system described by: *(t) - 6 m (0) + veu(t): y(t) = 01 (1) 60 = {1, 1421 a) Find the state transition matrix and the impulse response matrix of the system. b) Determine whether the system is (i) completely state controllable, (ii) differentially control- lable, (iii) instantaneously controllable, (iv) stabilizable at time to = 0. c) Repeat part (b) for to = 1. d) Determine whether the system is (i) observable, (ii) differentially observable, (iii) instanta-...
Consider a system described by the following equations: · 1 = I1 – 2x122 + u,...
 Consider a system described by the following equations: · 1 = I1 – 2x122 + u, º2 = X122 – 22, where x = (x1, x2) is the state and u is an input. (a) Find all equilibrium points for u = 0. (b) For each equilibrium point x = (ū1, 72), find the linearization of the system about the equilibrium. Express your results in state- space form, ż= Az + Bu, where z=x-. Also give the output equation y=...
Consider a system described by the following equations: · 1 = I1 – 2x122 + u, º2 = X122 – 22, where x = (x1, x2) is the state and u is an input. (a) Find all equilibrium points for u = 0. (b) For each equilibrium point x = (ū1, 72), find the linearization of the system about the equilibrium. Express your results in state- space form, ż= Az + Bu, where z=x-. Also give the output equation y=...
3. [20 marks] Consider the multinomial distribution with 3 categories, where the random variables Xi, X2 and X3 have the joint probability function where x = (zi, 2 2:23), θ = (θί, θ2), n = x1 + 2 2...
 3. [20 marks] Consider the multinomial distribution with 3 categories, where the random variables Xi, X2 and X3 have the joint probability function where x = (zi, 2 2:23), θ = (θί, θ2), n = x1 + 2 2 + x3, θι, θ2 > 0 and 1-0,-26, > 0. (a) [4 marks] Find the maximum likelihood estimator θ of θ. (b) [4 marks] Find that the Fisher information matrix I(0) (c) [4 marks] Show that θ is an MVUE. (d)...
3. [20 marks] Consider the multinomial distribution with 3 categories, where the random variables Xi, X2 and X3 have the joint probability function where x = (zi, 2 2:23), θ = (θί, θ2), n = x1 + 2 2 + x3, θι, θ2 > 0 and 1-0,-26, > 0. (a) [4 marks] Find the maximum likelihood estimator θ of θ. (b) [4 marks] Find that the Fisher information matrix I(0) (c) [4 marks] Show that θ is an MVUE. (d)...
 Write neatly please =)
1. Consider the system described by the ODE's X1 = X2 i,--2x,-3x2 +11 Using the State Function of Pontryagin to find the input u that minimizes u2 a. Determine the state function of Pontryagin H b. Find the optimal input and Ho c. Find the matrix A that will yield the governing equations Xy x2 12 If X1 (0) = 1,x2(0)=0 and x1(1)-x-(1)=0 determine the govern equations for λ! (0) and d. (0) in terms of...
Write neatly please =)
1. Consider the system described by the ODE's X1 = X2 i,--2x,-3x2 +11 Using the State Function of Pontryagin to find the input u that minimizes u2 a. Determine the state function of Pontryagin H b. Find the optimal input and Ho c. Find the matrix A that will yield the governing equations Xy x2 12 If X1 (0) = 1,x2(0)=0 and x1(1)-x-(1)=0 determine the govern equations for λ! (0) and d. (0) in terms of...
 8. Consider the system where the performance of the system is given by V -d a. Find the state function of Pontryagin H. b. Using the state function determine the optimal input c. Determine the equations governing λ and x. d. Determine u°()given x(0)-0 and x(1) I
8. Consider the system where the performance of the system is given by V -d a. Find the state function of Pontryagin H. b. Using the state function determine the optimal input c....
8. Consider the system where the performance of the system is given by V -d a. Find the state function of Pontryagin H. b. Using the state function determine the optimal input c. Determine the equations governing λ and x. d. Determine u°()given x(0)-0 and x(1) I
8. Consider the system where the performance of the system is given by V -d a. Find the state function of Pontryagin H. b. Using the state function determine the optimal input c....
 Problem 13.13. Consider the system of three linear differential equations: xt = 2x1 + 3x2 + 4.13 where the unknowns are the three functions xi(t), x2(t), and 23(t). x'a = 2x2 + 6.13 (a) Write the system in the form x' = Ax, where A is a (3 x 3) matrix. X'z = 2x3 (b) Write A as the sum of two matrices, A=D+U, where D is a diagonal matrix (all of the off-diagonal entries are zero, and the diagonal...
Problem 13.13. Consider the system of three linear differential equations: xt = 2x1 + 3x2 + 4.13 where the unknowns are the three functions xi(t), x2(t), and 23(t). x'a = 2x2 + 6.13 (a) Write the system in the form x' = Ax, where A is a (3 x 3) matrix. X'z = 2x3 (b) Write A as the sum of two matrices, A=D+U, where D is a diagonal matrix (all of the off-diagonal entries are zero, and the diagonal...
 uestionI. A system is represented by the following transfer function G(s)- (s+1)/(s2+5s+6) 1) Find a state equation and state transition matrices (A,B, C and D) of the system for a step input 6u(t). ii) Find the state transition matrix eAt) ii) Find the output response of system y(t) to a step input 6u(t) using state transition matrix, iv) Obtain the output response y(t) of the system with two other methods for step input óu(t). Question IV. A system is described...
uestionI. A system is represented by the following transfer function G(s)- (s+1)/(s2+5s+6) 1) Find a state equation and state transition matrices (A,B, C and D) of the system for a step input 6u(t). ii) Find the state transition matrix eAt) ii) Find the output response of system y(t) to a step input 6u(t) using state transition matrix, iv) Obtain the output response y(t) of the system with two other methods for step input óu(t). Question IV. A system is described...
 3. (l’+2° +1²=4') Topic: Laplace transform, CT system described by differential equations, LTI system properties. Consider a differential equation system for which the input x(t) and output y(t) are related by the differential equation d’y(t) dy(t) -6y(t) = 5x(t). dt dt Assume that the system is initially at rest. a) Determine the transfer function. b) Specify the ROC of H(s) and justify it. c) Determine the system impulse response h(t).
3. (l’+2° +1²=4') Topic: Laplace transform, CT system described by differential equations, LTI system properties. Consider a differential equation system for which the input x(t) and output y(t) are related by the differential equation d’y(t) dy(t) -6y(t) = 5x(t). dt dt Assume that the system is initially at rest. a) Determine the transfer function. b) Specify the ROC of H(s) and justify it. c) Determine the system impulse response h(t).
 Consider a mass-spring-damper system whose motion is described by the following system of differentiat equations [c1(f-k)+k,(f-х)-c2(x-9), f=f(t), y:' y(t) with x=x( t), where the function fit) is the input displacement function (known), while xit) and yt) are the two generalized coordinates (both unknown) of the mass-spring-damper systenm. 1. Identify the type of equations (e.g. H/NH, ODE/PDE, L/NL, order, type of coefficients, etc.J. 2. Express this system of differential equations in matrix form, assume f 0 and then determine its general...
Consider a mass-spring-damper system whose motion is described by the following system of differentiat equations [c1(f-k)+k,(f-х)-c2(x-9), f=f(t), y:' y(t) with x=x( t), where the function fit) is the input displacement function (known), while xit) and yt) are the two generalized coordinates (both unknown) of the mass-spring-damper systenm. 1. Identify the type of equations (e.g. H/NH, ODE/PDE, L/NL, order, type of coefficients, etc.J. 2. Express this system of differential equations in matrix form, assume f 0 and then determine its general...
 ote: Show all of your wo 1- A closed-loop system is described by the state equations x(t)-|-(5+α) . -8 | x(t) + 1 1」 u(t), y(t)= [6 0] x(t) a) Find the state transition matrix Ф (t) b) Determine the transfer function T(s) = Y(s) / U(s)
ote: Show all of your wo 1- A closed-loop system is described by the state equations x(t)-|-(5+α) . -8 | x(t) + 1 1」 u(t), y(t)= [6 0] x(t) a) Find the state transition matrix Ф (t) b) Determine the transfer function T(s) = Y(s) / U(s)
 1. Consider the system described by: *(t) - 6 m (0) + veu(t): y(t) = 01 (1) 60 = {1, 1421 a) Find the state transition matrix and the impulse response matrix of the system. b) Determine whether the system is (i) completely state controllable, (ii) differentially control- lable, (iii) instantaneously controllable, (iv) stabilizable at time to = 0. c) Repeat part (b) for to = 1. d) Determine whether the system is (i) observable, (ii) differentially observable, (iii) instanta-...
1. Consider the system described by: *(t) - 6 m (0) + veu(t): y(t) = 01 (1) 60 = {1, 1421 a) Find the state transition matrix and the impulse response matrix of the system. b) Determine whether the system is (i) completely state controllable, (ii) differentially control- lable, (iii) instantaneously controllable, (iv) stabilizable at time to = 0. c) Repeat part (b) for to = 1. d) Determine whether the system is (i) observable, (ii) differentially observable, (iii) instanta-...
 Consider a system described by the following equations: · 1 = I1 – 2x122 + u, º2 = X122 – 22, where x = (x1, x2) is the state and u is an input. (a) Find all equilibrium points for u = 0. (b) For each equilibrium point x = (ū1, 72), find the linearization of the system about the equilibrium. Express your results in state- space form, ż= Az + Bu, where z=x-. Also give the output equation y=...
Consider a system described by the following equations: · 1 = I1 – 2x122 + u, º2 = X122 – 22, where x = (x1, x2) is the state and u is an input. (a) Find all equilibrium points for u = 0. (b) For each equilibrium point x = (ū1, 72), find the linearization of the system about the equilibrium. Express your results in state- space form, ż= Az + Bu, where z=x-. Also give the output equation y=...
 3. [20 marks] Consider the multinomial distribution with 3 categories, where the random variables Xi, X2 and X3 have the joint probability function where x = (zi, 2 2:23), θ = (θί, θ2), n = x1 + 2 2 + x3, θι, θ2 > 0 and 1-0,-26, > 0. (a) [4 marks] Find the maximum likelihood estimator θ of θ. (b) [4 marks] Find that the Fisher information matrix I(0) (c) [4 marks] Show that θ is an MVUE. (d)...
3. [20 marks] Consider the multinomial distribution with 3 categories, where the random variables Xi, X2 and X3 have the joint probability function where x = (zi, 2 2:23), θ = (θί, θ2), n = x1 + 2 2 + x3, θι, θ2 > 0 and 1-0,-26, > 0. (a) [4 marks] Find the maximum likelihood estimator θ of θ. (b) [4 marks] Find that the Fisher information matrix I(0) (c) [4 marks] Show that θ is an MVUE. (d)...
Most questions answered within 3 hours.
-
The blues made its way into many kinds of music. Eric Clapton,
The Beatles, and Elvis...
asked 6 minutes ago -
If you’re standing at the bottom of a hill and asked to evaluate
it while being...
asked 1 hour ago -
1. Which region has taken the lead in the world of
e-waste handling?
a) European Union...
asked 55 minutes ago -
A 8.15- g bullet from a 9-mm pistol has a velocity of 366.0 m/s.
It strikes...
asked 2 hours ago -
The outstanding bonds of Alpha Extracts have a yield to maturity
of 7.4 percent and a...
asked 2 hours ago -
The Problem: The Case of the Harmonizing Vacations
Your CEO is exploring partnering with a European...
asked 3 hours ago -
A chemical equation is balanced by adding coefficients in front
of some formulas so that the...
asked 3 hours ago -
From the literature (reference your sources): What are the
lattice parameters of calcite and aragonite? Why...
asked 4 hours ago -
Your system is rejecting the question am asking which is
preceded by a case study. It...
asked 4 hours ago -
3. On January 2, 2000, Larry creates a trust with himself as
trustee. Larry as trustee...
asked 4 hours ago -
A member of the volleyball team spikes the ball. During this
process, she changes the velocity...
asked 4 hours ago -
Are adult gamers less likely to use a gaming console (Xbox,
PlayStation, Wii, etc...) than teen...
asked 5 hours ago