
Homework Answers

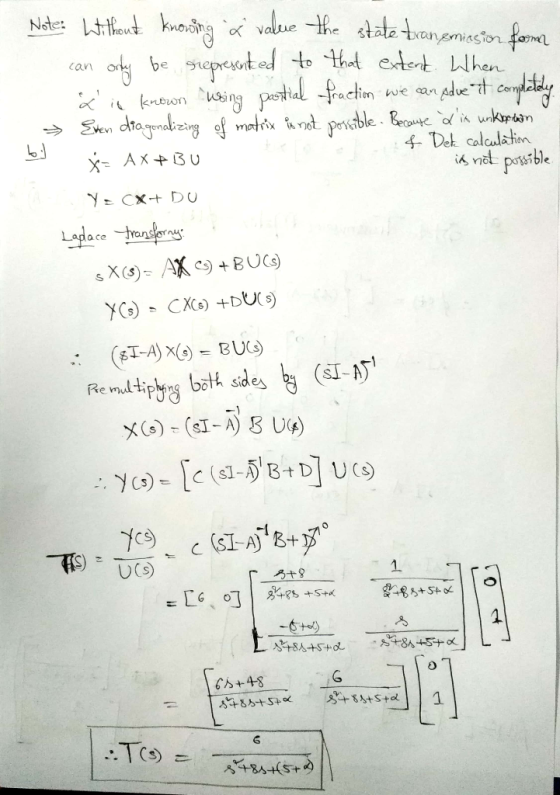
I tried for calculation procedure for alpha but, I find any such procedure. If u know anything of such comment below. I will solve it and give final value of state transmission form.
Please comment below for any further queries.
Thank you.
Add Answer to:
ote: Show all of your wo 1- A closed-loop system is described by the state equations...
UestionI. A system is represented by the following transfer function G(s)- (s+1)/(s2+5s+6) 1) Fin...
 uestionI. A system is represented by the following transfer function G(s)- (s+1)/(s2+5s+6) 1) Find a state equation and state transition matrices (A,B, C and D) of the system for a step input 6u(t). ii) Find the state transition matrix eAt) ii) Find the output response of system y(t) to a step input 6u(t) using state transition matrix, iv) Obtain the output response y(t) of the system with two other methods for step input óu(t). Question IV. A system is described...
uestionI. A system is represented by the following transfer function G(s)- (s+1)/(s2+5s+6) 1) Find a state equation and state transition matrices (A,B, C and D) of the system for a step input 6u(t). ii) Find the state transition matrix eAt) ii) Find the output response of system y(t) to a step input 6u(t) using state transition matrix, iv) Obtain the output response y(t) of the system with two other methods for step input óu(t). Question IV. A system is described...
1. Consider the system described by the ODE's X1 = X2 i,--2x,-3x2 +11 Using the State Function of...
 Write neatly please =)
1. Consider the system described by the ODE's X1 = X2 i,--2x,-3x2 +11 Using the State Function of Pontryagin to find the input u that minimizes u2 a. Determine the state function of Pontryagin H b. Find the optimal input and Ho c. Find the matrix A that will yield the governing equations Xy x2 12 If X1 (0) = 1,x2(0)=0 and x1(1)-x-(1)=0 determine the govern equations for λ! (0) and d. (0) in terms of...
Write neatly please =)
1. Consider the system described by the ODE's X1 = X2 i,--2x,-3x2 +11 Using the State Function of Pontryagin to find the input u that minimizes u2 a. Determine the state function of Pontryagin H b. Find the optimal input and Ho c. Find the matrix A that will yield the governing equations Xy x2 12 If X1 (0) = 1,x2(0)=0 and x1(1)-x-(1)=0 determine the govern equations for λ! (0) and d. (0) in terms of...
Consider the following system: -1-2-21 гг 1 0 1 L Where u is the system input and y is the measur...
 control system with observer
Consider the following system: -1-2-21 гг 1 0 1 L Where u is the system input and y is the measured output. 1. Find the transfer function of the system. 2. Design a state feedback controller with a full-state observer such that the step response of the closed loop system is second order dominant with an overshoot Mp settling time ts s 5 sec. Represent the observer-based control system in a compact state space form. 10%...
control system with observer
Consider the following system: -1-2-21 гг 1 0 1 L Where u is the system input and y is the measured output. 1. Find the transfer function of the system. 2. Design a state feedback controller with a full-state observer such that the step response of the closed loop system is second order dominant with an overshoot Mp settling time ts s 5 sec. Represent the observer-based control system in a compact state space form. 10%...
A system is described by the state variable equations 0 -2 1 10 y(t) =[1 0...
 A system is described by the state variable equations 0 -2 1 10 y(t) =[1 0 (ls(t). Determine G(s) = r(s)/U(s).
A system is described by the state variable equations 0 -2 1 10 y(t) =[1 0 (ls(t). Determine G(s) = r(s)/U(s).
1. Write the state-space equations for the system shown below ri (t) +2 (t) u (t) Figure 1: Syste...
 1. Write the state-space equations for the system shown below ri (t) +2 (t) u (t) Figure 1: System of Problem#1 2. Evaluate the state transition matrix eA for the matrix below and find the homogenous solution given x (0) 1 1 ] A=10-21 3. Find the power lution in powers of x. Show the details of your work. s (b) y" +4y=0 4. Determine if either the Frobenus or regular power series could be the method of your choice...
1. Write the state-space equations for the system shown below ri (t) +2 (t) u (t) Figure 1: System of Problem#1 2. Evaluate the state transition matrix eA for the matrix below and find the homogenous solution given x (0) 1 1 ] A=10-21 3. Find the power lution in powers of x. Show the details of your work. s (b) y" +4y=0 4. Determine if either the Frobenus or regular power series could be the method of your choice...
find the following: a)state transition matrix? b)output as function of time? c)design a state feedback controller to...
 find the following:
a)state transition matrix?
b)output as function of time?
c)design a state feedback controller to place closed loop at (-3)
and (-5)
Question (: (10 hO Considering the following system, 01x + 0 t<0 tt t20 Where x(0)-L1] , u(t)-(% ,u(t) a) Find the state transition matrix. (3 marks) b) Find the output as a function of time. (3 marks) c) Design a state feedback controller to place the closed loop poles at (-3) and (-5). (4 marks)...
find the following:
a)state transition matrix?
b)output as function of time?
c)design a state feedback controller to place closed loop at (-3)
and (-5)
Question (: (10 hO Considering the following system, 01x + 0 t<0 tt t20 Where x(0)-L1] , u(t)-(% ,u(t) a) Find the state transition matrix. (3 marks) b) Find the output as a function of time. (3 marks) c) Design a state feedback controller to place the closed loop poles at (-3) and (-5). (4 marks)...
Consider the following transfer function of a linear control system 1- Determine the state feedb...
 Consider the following transfer function of a linear control
system
1- Determine the state feedback gain matrix that places the
closed system at s=-32, -3.234 ± j3.3.
2- Design a full order observer which produces a set of desired
closed loop poles at s=-16, -16.15±j16.5
3-Assume X1 is measurable, design a reduced order observer with
desired closed loop poles at -16.15±j16.5
We were unable to transcribe this image1 Y(s) U(s) (s+1)(s2+0.7s+2) Consider the following transfer function of a linear control...
Consider the following transfer function of a linear control
system
1- Determine the state feedback gain matrix that places the
closed system at s=-32, -3.234 ± j3.3.
2- Design a full order observer which produces a set of desired
closed loop poles at s=-16, -16.15±j16.5
3-Assume X1 is measurable, design a reduced order observer with
desired closed loop poles at -16.15±j16.5
We were unable to transcribe this image1 Y(s) U(s) (s+1)(s2+0.7s+2) Consider the following transfer function of a linear control...
(a) (i) Show that the sensitivity of the closed-loop transfer function T(s) to variations in the...
 (a) (i) Show that the sensitivity of the closed-loop transfer function T(s) to variations in the plant transfer function G(s), in figure 4, is given by 1 SI - SG = 1+G(s)H(s) (ii) If G(s) = and H(s) = 10 (figure 4) and the dc gain of the plant transfer function G(s) changes by 1%, what is the corresponding change in the dc gain of the closed-loop system? [40%] (b) A feedback system is to control output angular position 0....
(a) (i) Show that the sensitivity of the closed-loop transfer function T(s) to variations in the plant transfer function G(s), in figure 4, is given by 1 SI - SG = 1+G(s)H(s) (ii) If G(s) = and H(s) = 10 (figure 4) and the dc gain of the plant transfer function G(s) changes by 1%, what is the corresponding change in the dc gain of the closed-loop system? [40%] (b) A feedback system is to control output angular position 0....
2. Consider the system described by the ODE's 2x1-3x2 +4u Using the State Function of Pontryagin ...
 2. Consider the system described by the ODE's 2x1-3x2 +4u Using the State Function of Pontryagin to find the input u that minimizes dt a. Determine the state function of Pontryagin H. b. Find the optimal input and H c. Find the matrix A that will yield the governing equations x1 ai If xi (0) : 0.x2(0) = O and xi (1) = İ. x 2(1) =0 determine the govem equations for λǐ(0) and λ2(0) in terms of the elements...
2. Consider the system described by the ODE's 2x1-3x2 +4u Using the State Function of Pontryagin to find the input u that minimizes dt a. Determine the state function of Pontryagin H. b. Find the optimal input and H c. Find the matrix A that will yield the governing equations x1 ai If xi (0) : 0.x2(0) = O and xi (1) = İ. x 2(1) =0 determine the govem equations for λǐ(0) and λ2(0) in terms of the elements...
Consider the following transfer function of a linear control system Determine the state feedba...
 Consider the following transfer function of a linear control
system
Determine the state feedback gain matrix that places the closed
system at s=-32, -3.234 ± j3.3.
Design a full order observer which produces a set of desired
closed loop poles at s=-16, -16.15±j16.5
Assume X1 is measurable, design a reduced order observer with
desired closed loop poles at -16.15±j16.5
We were unable to transcribe this image1 Y(s) U(s) (s+1)(s2+0.7s+2) Consider the following transfer function of a linear control system (a)...
Consider the following transfer function of a linear control
system
Determine the state feedback gain matrix that places the closed
system at s=-32, -3.234 ± j3.3.
Design a full order observer which produces a set of desired
closed loop poles at s=-16, -16.15±j16.5
Assume X1 is measurable, design a reduced order observer with
desired closed loop poles at -16.15±j16.5
We were unable to transcribe this image1 Y(s) U(s) (s+1)(s2+0.7s+2) Consider the following transfer function of a linear control system (a)...
 uestionI. A system is represented by the following transfer function G(s)- (s+1)/(s2+5s+6) 1) Find a state equation and state transition matrices (A,B, C and D) of the system for a step input 6u(t). ii) Find the state transition matrix eAt) ii) Find the output response of system y(t) to a step input 6u(t) using state transition matrix, iv) Obtain the output response y(t) of the system with two other methods for step input óu(t). Question IV. A system is described...
uestionI. A system is represented by the following transfer function G(s)- (s+1)/(s2+5s+6) 1) Find a state equation and state transition matrices (A,B, C and D) of the system for a step input 6u(t). ii) Find the state transition matrix eAt) ii) Find the output response of system y(t) to a step input 6u(t) using state transition matrix, iv) Obtain the output response y(t) of the system with two other methods for step input óu(t). Question IV. A system is described...
 Write neatly please =)
1. Consider the system described by the ODE's X1 = X2 i,--2x,-3x2 +11 Using the State Function of Pontryagin to find the input u that minimizes u2 a. Determine the state function of Pontryagin H b. Find the optimal input and Ho c. Find the matrix A that will yield the governing equations Xy x2 12 If X1 (0) = 1,x2(0)=0 and x1(1)-x-(1)=0 determine the govern equations for λ! (0) and d. (0) in terms of...
Write neatly please =)
1. Consider the system described by the ODE's X1 = X2 i,--2x,-3x2 +11 Using the State Function of Pontryagin to find the input u that minimizes u2 a. Determine the state function of Pontryagin H b. Find the optimal input and Ho c. Find the matrix A that will yield the governing equations Xy x2 12 If X1 (0) = 1,x2(0)=0 and x1(1)-x-(1)=0 determine the govern equations for λ! (0) and d. (0) in terms of...
 control system with observer
Consider the following system: -1-2-21 гг 1 0 1 L Where u is the system input and y is the measured output. 1. Find the transfer function of the system. 2. Design a state feedback controller with a full-state observer such that the step response of the closed loop system is second order dominant with an overshoot Mp settling time ts s 5 sec. Represent the observer-based control system in a compact state space form. 10%...
control system with observer
Consider the following system: -1-2-21 гг 1 0 1 L Where u is the system input and y is the measured output. 1. Find the transfer function of the system. 2. Design a state feedback controller with a full-state observer such that the step response of the closed loop system is second order dominant with an overshoot Mp settling time ts s 5 sec. Represent the observer-based control system in a compact state space form. 10%...
 A system is described by the state variable equations 0 -2 1 10 y(t) =[1 0 (ls(t). Determine G(s) = r(s)/U(s).
A system is described by the state variable equations 0 -2 1 10 y(t) =[1 0 (ls(t). Determine G(s) = r(s)/U(s).
 1. Write the state-space equations for the system shown below ri (t) +2 (t) u (t) Figure 1: System of Problem#1 2. Evaluate the state transition matrix eA for the matrix below and find the homogenous solution given x (0) 1 1 ] A=10-21 3. Find the power lution in powers of x. Show the details of your work. s (b) y" +4y=0 4. Determine if either the Frobenus or regular power series could be the method of your choice...
1. Write the state-space equations for the system shown below ri (t) +2 (t) u (t) Figure 1: System of Problem#1 2. Evaluate the state transition matrix eA for the matrix below and find the homogenous solution given x (0) 1 1 ] A=10-21 3. Find the power lution in powers of x. Show the details of your work. s (b) y" +4y=0 4. Determine if either the Frobenus or regular power series could be the method of your choice...
 find the following:
a)state transition matrix?
b)output as function of time?
c)design a state feedback controller to place closed loop at (-3)
and (-5)
Question (: (10 hO Considering the following system, 01x + 0 t<0 tt t20 Where x(0)-L1] , u(t)-(% ,u(t) a) Find the state transition matrix. (3 marks) b) Find the output as a function of time. (3 marks) c) Design a state feedback controller to place the closed loop poles at (-3) and (-5). (4 marks)...
find the following:
a)state transition matrix?
b)output as function of time?
c)design a state feedback controller to place closed loop at (-3)
and (-5)
Question (: (10 hO Considering the following system, 01x + 0 t<0 tt t20 Where x(0)-L1] , u(t)-(% ,u(t) a) Find the state transition matrix. (3 marks) b) Find the output as a function of time. (3 marks) c) Design a state feedback controller to place the closed loop poles at (-3) and (-5). (4 marks)...
 Consider the following transfer function of a linear control
system
1- Determine the state feedback gain matrix that places the
closed system at s=-32, -3.234 ± j3.3.
2- Design a full order observer which produces a set of desired
closed loop poles at s=-16, -16.15±j16.5
3-Assume X1 is measurable, design a reduced order observer with
desired closed loop poles at -16.15±j16.5
We were unable to transcribe this image1 Y(s) U(s) (s+1)(s2+0.7s+2) Consider the following transfer function of a linear control...
Consider the following transfer function of a linear control
system
1- Determine the state feedback gain matrix that places the
closed system at s=-32, -3.234 ± j3.3.
2- Design a full order observer which produces a set of desired
closed loop poles at s=-16, -16.15±j16.5
3-Assume X1 is measurable, design a reduced order observer with
desired closed loop poles at -16.15±j16.5
We were unable to transcribe this image1 Y(s) U(s) (s+1)(s2+0.7s+2) Consider the following transfer function of a linear control...
 (a) (i) Show that the sensitivity of the closed-loop transfer function T(s) to variations in the plant transfer function G(s), in figure 4, is given by 1 SI - SG = 1+G(s)H(s) (ii) If G(s) = and H(s) = 10 (figure 4) and the dc gain of the plant transfer function G(s) changes by 1%, what is the corresponding change in the dc gain of the closed-loop system? [40%] (b) A feedback system is to control output angular position 0....
(a) (i) Show that the sensitivity of the closed-loop transfer function T(s) to variations in the plant transfer function G(s), in figure 4, is given by 1 SI - SG = 1+G(s)H(s) (ii) If G(s) = and H(s) = 10 (figure 4) and the dc gain of the plant transfer function G(s) changes by 1%, what is the corresponding change in the dc gain of the closed-loop system? [40%] (b) A feedback system is to control output angular position 0....
 2. Consider the system described by the ODE's 2x1-3x2 +4u Using the State Function of Pontryagin to find the input u that minimizes dt a. Determine the state function of Pontryagin H. b. Find the optimal input and H c. Find the matrix A that will yield the governing equations x1 ai If xi (0) : 0.x2(0) = O and xi (1) = İ. x 2(1) =0 determine the govem equations for λǐ(0) and λ2(0) in terms of the elements...
2. Consider the system described by the ODE's 2x1-3x2 +4u Using the State Function of Pontryagin to find the input u that minimizes dt a. Determine the state function of Pontryagin H. b. Find the optimal input and H c. Find the matrix A that will yield the governing equations x1 ai If xi (0) : 0.x2(0) = O and xi (1) = İ. x 2(1) =0 determine the govem equations for λǐ(0) and λ2(0) in terms of the elements...
 Consider the following transfer function of a linear control
system
Determine the state feedback gain matrix that places the closed
system at s=-32, -3.234 ± j3.3.
Design a full order observer which produces a set of desired
closed loop poles at s=-16, -16.15±j16.5
Assume X1 is measurable, design a reduced order observer with
desired closed loop poles at -16.15±j16.5
We were unable to transcribe this image1 Y(s) U(s) (s+1)(s2+0.7s+2) Consider the following transfer function of a linear control system (a)...
Consider the following transfer function of a linear control
system
Determine the state feedback gain matrix that places the closed
system at s=-32, -3.234 ± j3.3.
Design a full order observer which produces a set of desired
closed loop poles at s=-16, -16.15±j16.5
Assume X1 is measurable, design a reduced order observer with
desired closed loop poles at -16.15±j16.5
We were unable to transcribe this image1 Y(s) U(s) (s+1)(s2+0.7s+2) Consider the following transfer function of a linear control system (a)...
Most questions answered within 3 hours.
-
The mayor of a town has proposed a plan for the construction of
a new community....
asked 33 seconds from now -
2. KopyKat is a firm that specializes in printing business cards
using the latest laser technology....
asked 18 minutes ago -
What type of stock pays dividends in arrears?
A.
Nonminus−cumulative
preferred stock
B.
Cumulative preferred stock...
asked 16 minutes ago -
Discuss what issues you see as needing to be addressed in an
organization in order to...
asked 18 minutes ago -
Why does varying input frequency to a buck converter affect the
magnitude of the output voltage...
asked 21 minutes ago -
Given the following reduction half-reactions:
Fe3+(aq)+e−→Fe2+(aq)
E∘red=+0.77V
S2O2−6(aq)+4H+(aq)+2e−→2H2SO3(aq)
E∘red=+0.60V
N2O(g)+2H+(aq)+2e−→N2(g)+H2O(l)
E∘red=−1.77V
VO+2(aq)+2H+(aq)+e−→VO2+(aq)+H2O(l)
E∘red=+1.00V
Write balanced chemica
asked 22 minutes ago -
Consider a random variable X with PDF given by f(x)=1/10 for x =
0, 1, 2,...,9....
asked 20 minutes ago -
This is QA Tester's task
What was the most heinous bug that you let slip through?...
asked 34 minutes ago -
What is the chemical equation (with states) for this
reaction in balanced and unbalanced form?
In...
asked 37 minutes ago -
In engineering and product design, it is important to consider
the weights of people so that...
asked 42 minutes ago -
The first-order decomposition of N2O5 at 328 K has a rate
constant of 1.70 × 10-3...
asked 44 minutes ago -
Do you believe that some things that fall into the category of
“pseudoscience” are worth believing...
asked 1 hour ago