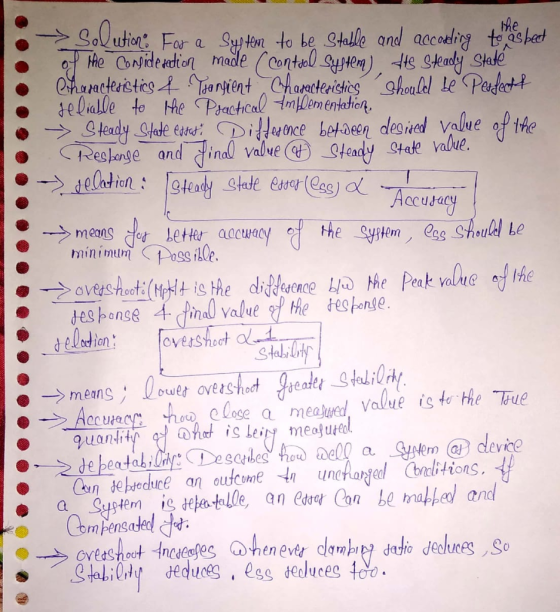
Explain how the accuracy and the repeatability are related to overshoot and steady state error.
Explain how the accuracy and the repeatability are related to overshoot and steady state error.
Homework Answers
Add Answer to:
Explain how the accuracy and the repeatability are related to overshoot and steady state error.
The speed control of is represented by the model below. Calculate the steady state error of...
 The speed control of is represented by the model below. Calculate the steady state error of the car to a step command in speed. Calculate the overshoot of the speed to a step command.
The speed control of is represented by the model below. Calculate the steady state error of the car to a step command in speed. Calculate the overshoot of the speed to a step command.
Design a compensator for the system below to provide a closed-loop response that satisfies the following requirements: Steady state error=0 for a constant reference, Percent Overshoot≈5%, Settling Tim...
Design a compensator for the system below to provide a closed-loop response that satisfies the following requirements: Steady state error=0 for a constant reference, Percent Overshoot≈5%, Settling Time≈1.2
3- Consider the following system. a) b) Select Ki so that the steady state error is zero. Determi...
 3- Consider the following system. a) b) Select Ki so that the steady state error is zero. Determine the percent overshoot P.O. and the time to peak To of the unit step response when Ki is as in part (a). R(G)
3- Consider the following system. a) b) Select Ki so that the steady state error is zero. Determine the percent overshoot P.O. and the time to peak To of the unit step response when Ki is as in part...
3- Consider the following system. a) b) Select Ki so that the steady state error is zero. Determine the percent overshoot P.O. and the time to peak To of the unit step response when Ki is as in part (a). R(G)
3- Consider the following system. a) b) Select Ki so that the steady state error is zero. Determine the percent overshoot P.O. and the time to peak To of the unit step response when Ki is as in part...
Q1. A closed-loop transfer function is G(s) Yo.108(s+3) els> ) Determine the steady-state error f...
 Q1. A closed-loop transfer function is G(s) Yo.108(s+3) els> ) Determine the steady-state error for a unit step imput R(s)-14s Error signal is E(s) - R(s)-Y(s). Assume that the complex of the final value. ii) poles dominate and determine the overshoot and settling time to within 2%
Q1. A closed-loop transfer function is G(s) Yo.108(s+3) els> ) Determine the steady-state error for a unit step imput R(s)-14s Error signal is E(s) - R(s)-Y(s). Assume that the complex of the final...
Q1. A closed-loop transfer function is G(s) Yo.108(s+3) els> ) Determine the steady-state error for a unit step imput R(s)-14s Error signal is E(s) - R(s)-Y(s). Assume that the complex of the final value. ii) poles dominate and determine the overshoot and settling time to within 2%
Q1. A closed-loop transfer function is G(s) Yo.108(s+3) els> ) Determine the steady-state error for a unit step imput R(s)-14s Error signal is E(s) - R(s)-Y(s). Assume that the complex of the final...
Find the steady state error constants and the steady-state error response for the digital control system...
 Find the steady state error constants and the steady-state error response for the digital control system shown below, if the inputs are: a. Unit Step, u(t) b. Unit Ramp, t u(t) c. Unit Parabola, 0.5t2u(t) 2. R(s) + C(s) s(s 2) T=0.1
Find the steady state error constants and the steady-state error response for the digital control system shown below, if the inputs are: a. Unit Step, u(t) b. Unit Ramp, t u(t) c. Unit Parabola, 0.5t2u(t) 2. R(s) + C(s) s(s 2) T=0.1
Problem 6.2 To avoid steady-state error for the thermal plant of Problem 6.1, a PI control is con...
 PROBLEM 6.3 ONLY
Problem 6.2 To avoid steady-state error for the thermal plant of Problem 6.1, a PI control is considered by using a compensator having the transfer function s+ e (a) For c-2 as in Problem 5.1, find the value of K which provides a damping factor(-.7. Using this value of K determine the closed-loop step response. (b) Using the "dominant pole" concept, and the standard response curves for second-order systems, (Unit 6 notes) estimate the overshoot and the...
PROBLEM 6.3 ONLY
Problem 6.2 To avoid steady-state error for the thermal plant of Problem 6.1, a PI control is considered by using a compensator having the transfer function s+ e (a) For c-2 as in Problem 5.1, find the value of K which provides a damping factor(-.7. Using this value of K determine the closed-loop step response. (b) Using the "dominant pole" concept, and the standard response curves for second-order systems, (Unit 6 notes) estimate the overshoot and the...
1. Steady-State Error question Nise (7.13) For the system in Fig P7.4 find Kp, K,, Kg and state the system type 3) FIGURE P7.4 2. Nise (9.3) For a unity feedback system with 10% OS: KG(s) 1 +KG...
 1. Steady-State Error question Nise (7.13) For the system in Fig P7.4 find Kp, K,, Kg and state the system type 3) FIGURE P7.4 2. Nise (9.3) For a unity feedback system with 10% OS: KG(s) 1 +KG(s) NOTE: the 10% overshoot line is 126.16" with a (-59. a. Find the K value of the system at 10% OS if this corresponds to a point on the root locus of s-1.87+j2.56 NOTE: use the fact that 1 + KG(s)- 0...
1. Steady-State Error question Nise (7.13) For the system in Fig P7.4 find Kp, K,, Kg and state the system type 3) FIGURE P7.4 2. Nise (9.3) For a unity feedback system with 10% OS: KG(s) 1 +KG(s) NOTE: the 10% overshoot line is 126.16" with a (-59. a. Find the K value of the system at 10% OS if this corresponds to a point on the root locus of s-1.87+j2.56 NOTE: use the fact that 1 + KG(s)- 0...
Question 6: a) Derive and expression for the steady state error of the system described below...
 Question 6: a) Derive and expression for the steady state error of the system described below when a unit ramp function is used as input. r(t) —+ Q G.(s) Gy(s) y(t) H(s) 10 b) Find the steady state error with a ramp input as a function of K, when the transfer functions of the system are given as: Gc= + 3 G p = Gips? +45 +10 and H= 0.1 c) For what values of K would the system have...
Question 6: a) Derive and expression for the steady state error of the system described below when a unit ramp function is used as input. r(t) —+ Q G.(s) Gy(s) y(t) H(s) 10 b) Find the steady state error with a ramp input as a function of K, when the transfer functions of the system are given as: Gc= + 3 G p = Gips? +45 +10 and H= 0.1 c) For what values of K would the system have...
Assuming the closed-loop system is stable, find the steady-state error if
 Assuming the closed-loop system is stable, find the steady-state
error if
Assuming the closed-loop system is stable, find the steady-state
error if
Problem 7. (15 pts] Given the system below, find the following: a. The steady-state error for...
 Problem 7. (15 pts] Given the system below, find the following: a. The steady-state error for 15u(t) b. The steady state error for 20tu(t) R(s) 255 +1 10
Problem 7. (15 pts] Given the system below, find the following: a. The steady-state error for 15u(t) b. The steady state error for 20tu(t) R(s) 255 +1 10
 The speed control of is represented by the model below. Calculate the steady state error of the car to a step command in speed. Calculate the overshoot of the speed to a step command.
The speed control of is represented by the model below. Calculate the steady state error of the car to a step command in speed. Calculate the overshoot of the speed to a step command.
 3- Consider the following system. a) b) Select Ki so that the steady state error is zero. Determine the percent overshoot P.O. and the time to peak To of the unit step response when Ki is as in part (a). R(G)
3- Consider the following system. a) b) Select Ki so that the steady state error is zero. Determine the percent overshoot P.O. and the time to peak To of the unit step response when Ki is as in part...
3- Consider the following system. a) b) Select Ki so that the steady state error is zero. Determine the percent overshoot P.O. and the time to peak To of the unit step response when Ki is as in part (a). R(G)
3- Consider the following system. a) b) Select Ki so that the steady state error is zero. Determine the percent overshoot P.O. and the time to peak To of the unit step response when Ki is as in part...
 Q1. A closed-loop transfer function is G(s) Yo.108(s+3) els> ) Determine the steady-state error for a unit step imput R(s)-14s Error signal is E(s) - R(s)-Y(s). Assume that the complex of the final value. ii) poles dominate and determine the overshoot and settling time to within 2%
Q1. A closed-loop transfer function is G(s) Yo.108(s+3) els> ) Determine the steady-state error for a unit step imput R(s)-14s Error signal is E(s) - R(s)-Y(s). Assume that the complex of the final...
Q1. A closed-loop transfer function is G(s) Yo.108(s+3) els> ) Determine the steady-state error for a unit step imput R(s)-14s Error signal is E(s) - R(s)-Y(s). Assume that the complex of the final value. ii) poles dominate and determine the overshoot and settling time to within 2%
Q1. A closed-loop transfer function is G(s) Yo.108(s+3) els> ) Determine the steady-state error for a unit step imput R(s)-14s Error signal is E(s) - R(s)-Y(s). Assume that the complex of the final...
 Find the steady state error constants and the steady-state error response for the digital control system shown below, if the inputs are: a. Unit Step, u(t) b. Unit Ramp, t u(t) c. Unit Parabola, 0.5t2u(t) 2. R(s) + C(s) s(s 2) T=0.1
Find the steady state error constants and the steady-state error response for the digital control system shown below, if the inputs are: a. Unit Step, u(t) b. Unit Ramp, t u(t) c. Unit Parabola, 0.5t2u(t) 2. R(s) + C(s) s(s 2) T=0.1
 PROBLEM 6.3 ONLY
Problem 6.2 To avoid steady-state error for the thermal plant of Problem 6.1, a PI control is considered by using a compensator having the transfer function s+ e (a) For c-2 as in Problem 5.1, find the value of K which provides a damping factor(-.7. Using this value of K determine the closed-loop step response. (b) Using the "dominant pole" concept, and the standard response curves for second-order systems, (Unit 6 notes) estimate the overshoot and the...
PROBLEM 6.3 ONLY
Problem 6.2 To avoid steady-state error for the thermal plant of Problem 6.1, a PI control is considered by using a compensator having the transfer function s+ e (a) For c-2 as in Problem 5.1, find the value of K which provides a damping factor(-.7. Using this value of K determine the closed-loop step response. (b) Using the "dominant pole" concept, and the standard response curves for second-order systems, (Unit 6 notes) estimate the overshoot and the...
 1. Steady-State Error question Nise (7.13) For the system in Fig P7.4 find Kp, K,, Kg and state the system type 3) FIGURE P7.4 2. Nise (9.3) For a unity feedback system with 10% OS: KG(s) 1 +KG(s) NOTE: the 10% overshoot line is 126.16" with a (-59. a. Find the K value of the system at 10% OS if this corresponds to a point on the root locus of s-1.87+j2.56 NOTE: use the fact that 1 + KG(s)- 0...
1. Steady-State Error question Nise (7.13) For the system in Fig P7.4 find Kp, K,, Kg and state the system type 3) FIGURE P7.4 2. Nise (9.3) For a unity feedback system with 10% OS: KG(s) 1 +KG(s) NOTE: the 10% overshoot line is 126.16" with a (-59. a. Find the K value of the system at 10% OS if this corresponds to a point on the root locus of s-1.87+j2.56 NOTE: use the fact that 1 + KG(s)- 0...
 Question 6: a) Derive and expression for the steady state error of the system described below when a unit ramp function is used as input. r(t) —+ Q G.(s) Gy(s) y(t) H(s) 10 b) Find the steady state error with a ramp input as a function of K, when the transfer functions of the system are given as: Gc= + 3 G p = Gips? +45 +10 and H= 0.1 c) For what values of K would the system have...
Question 6: a) Derive and expression for the steady state error of the system described below when a unit ramp function is used as input. r(t) —+ Q G.(s) Gy(s) y(t) H(s) 10 b) Find the steady state error with a ramp input as a function of K, when the transfer functions of the system are given as: Gc= + 3 G p = Gips? +45 +10 and H= 0.1 c) For what values of K would the system have...
 Assuming the closed-loop system is stable, find the steady-state
error if
Assuming the closed-loop system is stable, find the steady-state
error if
 Problem 7. (15 pts] Given the system below, find the following: a. The steady-state error for 15u(t) b. The steady state error for 20tu(t) R(s) 255 +1 10
Problem 7. (15 pts] Given the system below, find the following: a. The steady-state error for 15u(t) b. The steady state error for 20tu(t) R(s) 255 +1 10
Most questions answered within 3 hours.
-
Please Help ASAP.
1Consider the below code which iterates over a linked
list of n nodes...
asked 4 minutes ago -
Determine the air to fuel ratio of:
Canadian natural gas, with 93.9% methane, 4.2% ethane, 0.3%...
asked 4 minutes ago -
A manufacturer of power tools claims that the average amount of
time required to assemble their...
asked 7 minutes ago -
"electron-withdrawing substituents on carbon encourage back
donation", then on the next page he says that "greater...
asked 18 minutes ago -
On December 31, 2016, the shareholders’ equity section of the
balance sheet of R & L...
asked 26 minutes ago -
16.7
At t=0s a small "upward" (positive y) pulse centered at x = 5.0
m is...
asked 40 minutes ago -
Twitter Users and News: A poll conducted in 2013 found that 52%
of U.S. adult Twitter...
asked 55 minutes ago -
How
would I know whether a given amino acid has an ionizable group or
not? please...
asked 1 hour ago -
True or false?
True False The function of the enzyme acyl CoA
synthetase is the ATP-dependent coupling...
asked 1 hour ago -
Nadia Corporation adjusts its debt so that its interest coverage
(EBIT/Interest) remains constant at 3. Nadia’s...
asked 1 hour ago -
In a clinical trial, 20 out of 600 patients taking a
prescription drug complained of flulike...
asked 1 hour ago -
7. How many types of nuclear processes can produce energy? 8.
How many types of radioactive...
asked 1 hour ago