
Homework Answers
(a) The transfer function is between position and the voltage applied. The differential equations can be written as, Let the torque produced by motor be T and the Backemf and Torque constant are considered as of same values k. Then we can write,

In Laplace domain we can write,

Eliminating I(s) between the equations we get the transfer function as,

Substituting values we get,

(b) Let us say that the sampling time is 0.1 seconds (10 Hz).
(c) The pulse transfer function will be,

(d) Now the closed loop system will be stable for values of K such that the poles remain in left side of the s-plane (ie. the real part is negative). For that we can use the Root locus plot, which gives,
(MATLAB Code: rlocus(sys)) sys is the transfer function in discrete domain.
The plot is,
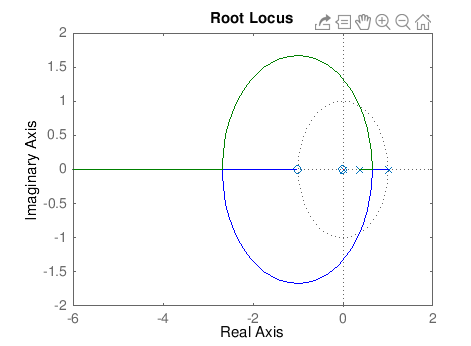
Hence the range of K values should be greater than 106.
Add Answer to:
Consider the model of a small DC motor, where the following parameter values are assumed: R-10 L-10mH,J-0.01kgm0.0.05 2. ra a. Write down the transfer function of the system b. Choose a sample ti...
Consider the model of a spring-mass-damper system, where the following parameter values are assum...
 answer 3 and 4 please
Consider the model of a spring-mass-damper system, where the following parameter values are assumed: m 1,b 2,k 2. 3. a. Write down the transfer function of the system b. Choose a sample time for the system c. Find the pulse transfer function (use MATLAB 'c2d' command) d. Find the range of K for stability for the closed-loop sampled-data system 4. Consider a series RLC circuit driven by a voltage source with capacitor voltage as output....
answer 3 and 4 please
Consider the model of a spring-mass-damper system, where the following parameter values are assumed: m 1,b 2,k 2. 3. a. Write down the transfer function of the system b. Choose a sample time for the system c. Find the pulse transfer function (use MATLAB 'c2d' command) d. Find the range of K for stability for the closed-loop sampled-data system 4. Consider a series RLC circuit driven by a voltage source with capacitor voltage as output....
Consider the model of a cylinderical hydraulic reservoir with a bottom flow valve with input qin ...
 Consider the model of a cylinderical hydraulic reservoir with a bottom flow valve with input qin and output ΔΡ where the parameter values are: A-1m2, ρ 20 ; let g 10. 1. 1 l 图,R- 20 let g10 , a. Write down the transfer function of the system b. Choose a sample time for the system c. Find the pulse transfer function (use MATLAB 'c2d' command) d. Find the range of K for stability for the closed-loop sampled-data system
Consider...
Consider the model of a cylinderical hydraulic reservoir with a bottom flow valve with input qin and output ΔΡ where the parameter values are: A-1m2, ρ 20 ; let g 10. 1. 1 l 图,R- 20 let g10 , a. Write down the transfer function of the system b. Choose a sample time for the system c. Find the pulse transfer function (use MATLAB 'c2d' command) d. Find the range of K for stability for the closed-loop sampled-data system
Consider...
4. Consider a series RLC circuit driven by a voltage source with capacitor voltage as output. Ass...
 4. Consider a series RLC circuit driven by a voltage source with capacitor voltage as output. Assume the following parameter values: R 20n, L ;: 1 mH, C : 5μF a. b. c. d. Write down the transfer function of the system Choose a sample time for the system Find the pulse transfer function (use MATLAB 'c2d' command) Find the range of K for stability for the closed-loop sampled-data system
4. Consider a series RLC circuit driven by a voltage...
4. Consider a series RLC circuit driven by a voltage source with capacitor voltage as output. Assume the following parameter values: R 20n, L ;: 1 mH, C : 5μF a. b. c. d. Write down the transfer function of the system Choose a sample time for the system Find the pulse transfer function (use MATLAB 'c2d' command) Find the range of K for stability for the closed-loop sampled-data system
4. Consider a series RLC circuit driven by a voltage...
Consider the model of a spring-mass-damper system, where the following parameter values are assum...
 Consider the model of a spring-mass-damper system, where the following parameter values are assumed: m-1,b 2, k- 2. a. Write down the transfer function of the system b. Sketch a root locus for static controller gain K c. Find the range of K for stability
Consider the model of a spring-mass-damper system, where the following parameter values are assumed: m-1,b 2, k- 2. a. Write down the transfer function of the system b. Sketch a root locus for static controller...
Consider the model of a spring-mass-damper system, where the following parameter values are assumed: m-1,b 2, k- 2. a. Write down the transfer function of the system b. Sketch a root locus for static controller gain K c. Find the range of K for stability
Consider the model of a spring-mass-damper system, where the following parameter values are assumed: m-1,b 2, k- 2. a. Write down the transfer function of the system b. Sketch a root locus for static controller...
Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%....
 Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
Consider the following closed-loop system, in which the plant model is P(s) = elave R()2-CO POTY()...
 Consider the following closed-loop system, in which the plant model is P(s) = elave R()2-CO POTY() a) Assume C(s) = K. Determine the range of K for which the closed-loop system is stable via: (1.) the routh-hurwitz stability criteria, (ii.) the margin() command in Matlab, and (lii.) the rlocus command in Matlab. b) Assume a proportional controller of C(s) = K = 40, and a time delay T, located between the controller and plant. Determine the maximum T, value that...
Consider the following closed-loop system, in which the plant model is P(s) = elave R()2-CO POTY() a) Assume C(s) = K. Determine the range of K for which the closed-loop system is stable via: (1.) the routh-hurwitz stability criteria, (ii.) the margin() command in Matlab, and (lii.) the rlocus command in Matlab. b) Assume a proportional controller of C(s) = K = 40, and a time delay T, located between the controller and plant. Determine the maximum T, value that...
2:50 PM Sun May 12 89%- X 2012 Spring All Exams.pdf 5. (30 pts) A unity feedback system has the loop transfer function shown below. a) Draw the complete Nyquist HG(s)-plane plot for both small K...
 2:50 PM Sun May 12 89%- X 2012 Spring All Exams.pdf 5. (30 pts) A unity feedback system has the loop transfer function shown below. a) Draw the complete Nyquist HG(s)-plane plot for both small K and large K. Use the Nyquist Path which encloses the pole of HG(s) that is at the origin. No other path will be accepted. b) Determine whether the closed loop system is stable for both small K and large Argue in terms of the...
2:50 PM Sun May 12 89%- X 2012 Spring All Exams.pdf 5. (30 pts) A unity feedback system has the loop transfer function shown below. a) Draw the complete Nyquist HG(s)-plane plot for both small K and large K. Use the Nyquist Path which encloses the pole of HG(s) that is at the origin. No other path will be accepted. b) Determine whether the closed loop system is stable for both small K and large Argue in terms of the...
 answer 3 and 4 please
Consider the model of a spring-mass-damper system, where the following parameter values are assumed: m 1,b 2,k 2. 3. a. Write down the transfer function of the system b. Choose a sample time for the system c. Find the pulse transfer function (use MATLAB 'c2d' command) d. Find the range of K for stability for the closed-loop sampled-data system 4. Consider a series RLC circuit driven by a voltage source with capacitor voltage as output....
answer 3 and 4 please
Consider the model of a spring-mass-damper system, where the following parameter values are assumed: m 1,b 2,k 2. 3. a. Write down the transfer function of the system b. Choose a sample time for the system c. Find the pulse transfer function (use MATLAB 'c2d' command) d. Find the range of K for stability for the closed-loop sampled-data system 4. Consider a series RLC circuit driven by a voltage source with capacitor voltage as output....
 Consider the model of a cylinderical hydraulic reservoir with a bottom flow valve with input qin and output ΔΡ where the parameter values are: A-1m2, ρ 20 ; let g 10. 1. 1 l 图,R- 20 let g10 , a. Write down the transfer function of the system b. Choose a sample time for the system c. Find the pulse transfer function (use MATLAB 'c2d' command) d. Find the range of K for stability for the closed-loop sampled-data system
Consider...
Consider the model of a cylinderical hydraulic reservoir with a bottom flow valve with input qin and output ΔΡ where the parameter values are: A-1m2, ρ 20 ; let g 10. 1. 1 l 图,R- 20 let g10 , a. Write down the transfer function of the system b. Choose a sample time for the system c. Find the pulse transfer function (use MATLAB 'c2d' command) d. Find the range of K for stability for the closed-loop sampled-data system
Consider...
 4. Consider a series RLC circuit driven by a voltage source with capacitor voltage as output. Assume the following parameter values: R 20n, L ;: 1 mH, C : 5μF a. b. c. d. Write down the transfer function of the system Choose a sample time for the system Find the pulse transfer function (use MATLAB 'c2d' command) Find the range of K for stability for the closed-loop sampled-data system
4. Consider a series RLC circuit driven by a voltage...
4. Consider a series RLC circuit driven by a voltage source with capacitor voltage as output. Assume the following parameter values: R 20n, L ;: 1 mH, C : 5μF a. b. c. d. Write down the transfer function of the system Choose a sample time for the system Find the pulse transfer function (use MATLAB 'c2d' command) Find the range of K for stability for the closed-loop sampled-data system
4. Consider a series RLC circuit driven by a voltage...
 Consider the model of a spring-mass-damper system, where the following parameter values are assumed: m-1,b 2, k- 2. a. Write down the transfer function of the system b. Sketch a root locus for static controller gain K c. Find the range of K for stability
Consider the model of a spring-mass-damper system, where the following parameter values are assumed: m-1,b 2, k- 2. a. Write down the transfer function of the system b. Sketch a root locus for static controller...
Consider the model of a spring-mass-damper system, where the following parameter values are assumed: m-1,b 2, k- 2. a. Write down the transfer function of the system b. Sketch a root locus for static controller gain K c. Find the range of K for stability
Consider the model of a spring-mass-damper system, where the following parameter values are assumed: m-1,b 2, k- 2. a. Write down the transfer function of the system b. Sketch a root locus for static controller...
 Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
 Consider the following closed-loop system, in which the plant model is P(s) = elave R()2-CO POTY() a) Assume C(s) = K. Determine the range of K for which the closed-loop system is stable via: (1.) the routh-hurwitz stability criteria, (ii.) the margin() command in Matlab, and (lii.) the rlocus command in Matlab. b) Assume a proportional controller of C(s) = K = 40, and a time delay T, located between the controller and plant. Determine the maximum T, value that...
Consider the following closed-loop system, in which the plant model is P(s) = elave R()2-CO POTY() a) Assume C(s) = K. Determine the range of K for which the closed-loop system is stable via: (1.) the routh-hurwitz stability criteria, (ii.) the margin() command in Matlab, and (lii.) the rlocus command in Matlab. b) Assume a proportional controller of C(s) = K = 40, and a time delay T, located between the controller and plant. Determine the maximum T, value that...
 2:50 PM Sun May 12 89%- X 2012 Spring All Exams.pdf 5. (30 pts) A unity feedback system has the loop transfer function shown below. a) Draw the complete Nyquist HG(s)-plane plot for both small K and large K. Use the Nyquist Path which encloses the pole of HG(s) that is at the origin. No other path will be accepted. b) Determine whether the closed loop system is stable for both small K and large Argue in terms of the...
2:50 PM Sun May 12 89%- X 2012 Spring All Exams.pdf 5. (30 pts) A unity feedback system has the loop transfer function shown below. a) Draw the complete Nyquist HG(s)-plane plot for both small K and large K. Use the Nyquist Path which encloses the pole of HG(s) that is at the origin. No other path will be accepted. b) Determine whether the closed loop system is stable for both small K and large Argue in terms of the...
Most questions answered within 3 hours.
-
Assume an array list is declared as follows:
int list[100]
and that all other variables have...
asked 13 seconds ago -
Do you believe that as the pool of engineers decrease, or become
in higher demand, that...
asked 8 minutes ago -
A
700 kg car is coasting along a level road, slowing down at an
acceleration of...
asked 16 minutes ago -
find dB IL for a sound with the intensity of 3x10^-13 w/sq meter
with a reference...
asked 17 minutes ago -
Case 7-3: Wentworth Hospital Discussion Questions: essay
paragraph
Is there anything irregular here?
What is your...
asked 20 minutes ago -
1- A) How many milliliters of 0.100 M NaOH are needed to
neutralize 50.00 mL of...
asked 37 minutes ago -
It is determined that a reaction is 1st order in [BrO3-], 1st
order in [Br-] and...
asked 39 minutes ago -
Write a JavaScript program to implement the Least-Squares Linear
Regression algorithm shown below, for an arbitrary...
asked 49 minutes ago -
Determine the solubility of Cadmium in equilibrium with Cadmium
hydroxide, Cd(OH)2, as a function of pH....
asked 53 minutes ago -
When 34.2 grams of strontium reacts with excess molecular
oxygen, how many grams of the product...
asked 1 hour ago -
nformation related to the Berkley Company for the calendar year
2015 follows:
Liabilities, December 31, 2015...
asked 56 minutes ago -
Please help!
A voltaic cell consists of a Mn/Mn2+ anode (E°= -1.18 V) and a
Fe/Fe2+...
asked 1 hour ago