
Homework Answers
Add Answer to:
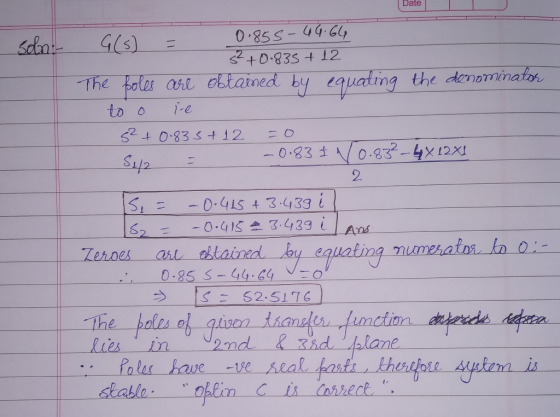
Poles and Zeros For the transfer function given: 0.85 8-44.64 G(s) = 긁+0.83 12.00 Part A-Poles Find the system pole 8 Submit Part B-Poles Find the system pole s2 Submit Part C-Zeros Find the system...
For the system shown below, find the followings; (a) Make an accurate plot of the root locus (b) The value of K that gives a stable system with critically damped second-order poles (c ) The value...
 For the system shown below, find the followings; (a) Make an accurate plot of the root locus (b) The value of K that gives a stable system with critically damped second-order poles (c ) The value of K that gives a marginally stable sytems Cs) (s-20s- I) 0.5 The characteristic equation (denominator of the closed-loop trans fer function set equal to zero) is given by
For the system shown below, find the followings; (a) Make an accurate plot of the...
For the system shown below, find the followings; (a) Make an accurate plot of the root locus (b) The value of K that gives a stable system with critically damped second-order poles (c ) The value of K that gives a marginally stable sytems Cs) (s-20s- I) 0.5 The characteristic equation (denominator of the closed-loop trans fer function set equal to zero) is given by
For the system shown below, find the followings; (a) Make an accurate plot of the...
Given h(t)=(e-t+e-3t)u(t) find: A) The transfer function H(s). B) The locations of all poles and zeros....
Given h(t)=(e-t+e-3t)u(t) find: A) The transfer function H(s). B) The locations of all poles and zeros. C) Determine if the system is stable or not D) Find the differential equation for this system.
2. The transfer function of a CT LTI system is given by H(s) (s2 +6s +10) (s2 -4s +8) a) Draw the...
 2. The transfer function of a CT LTI system is given by H(s) (s2 +6s +10) (s2 -4s +8) a) Draw the pole-zero plot of the transfer function. b) Show all possible ROC's associated with this transfer function. c) Obtain the impulse response h(t) associated with each ROC of the transfer function. d) Which one (if any) of the impulse responses of part c) is stable?
2. The transfer function of a CT LTI system is given by H(s) (s2...
2. The transfer function of a CT LTI system is given by H(s) (s2 +6s +10) (s2 -4s +8) a) Draw the pole-zero plot of the transfer function. b) Show all possible ROC's associated with this transfer function. c) Obtain the impulse response h(t) associated with each ROC of the transfer function. d) Which one (if any) of the impulse responses of part c) is stable?
2. The transfer function of a CT LTI system is given by H(s) (s2...
Problem 4: Given the transfer function, 25pts 25 H(s) S2+6s 25 (a) (b) (c) Fi Find...
 Problem 4: Given the transfer function, 25pts 25 H(s) S2+6s 25 (a) (b) (c) Fi Find Please put the units. Find the poles of the system. Is this system overdamped, underdamped, the settling time, peak time, percent overshoot, and rise time. undamped or critically damped. Explain. nd the state space representation in phase variable form of the above transfer function H(s)
Problem 4: Given the transfer function, 25pts 25 H(s) S2+6s 25 (a) (b) (c) Fi Find Please put the units. Find the poles of the system. Is this system overdamped, underdamped, the settling time, peak time, percent overshoot, and rise time. undamped or critically damped. Explain. nd the state space representation in phase variable form of the above transfer function H(s)
A second-order process is described by its transfer function G(s) = (s+1)(843) and a PI controlle...
 A second-order process is described by its transfer function G(s) = (s+1)(843) and a PI controller by Consider feedback control with unit feedback gain as shown in Figure 1 A disturbance D(s) exists, and to achieve zero steady-state error, a small integral component is applied. Technical limitations restrict the controller gain kp to values of 0.2 or less. The goal is to examine the influence of the controller parameter k on the dynamic response. D(s) Controller Process X(s) Y(s) Figure...
A second-order process is described by its transfer function G(s) = (s+1)(843) and a PI controller by Consider feedback control with unit feedback gain as shown in Figure 1 A disturbance D(s) exists, and to achieve zero steady-state error, a small integral component is applied. Technical limitations restrict the controller gain kp to values of 0.2 or less. The goal is to examine the influence of the controller parameter k on the dynamic response. D(s) Controller Process X(s) Y(s) Figure...
For the given closed loop system, where: C(s)= 9.43 s+ 9.56 G(s)= 87.84 / ( s2+ 2.94 s+ 9.00 ) Part A: Obtain...
 For the given closed loop system, where:
C(s)= 9.43 s+ 9.56
G(s)= 87.84 / ( s2+ 2.94
s+ 9.00 )
Part A: Obtain the rise time of the step response of the plant
transfer function G(s).
Part B: Obtain the overshoot of the step response of the plant
transfer function G(s).
Part C: Obtain the 1% settling time of the step response of the
plant transfer function G(s).
Part D: Obtain the natural frequency ωn of the
characteristic polynomial of...
For the given closed loop system, where:
C(s)= 9.43 s+ 9.56
G(s)= 87.84 / ( s2+ 2.94
s+ 9.00 )
Part A: Obtain the rise time of the step response of the plant
transfer function G(s).
Part B: Obtain the overshoot of the step response of the plant
transfer function G(s).
Part C: Obtain the 1% settling time of the step response of the
plant transfer function G(s).
Part D: Obtain the natural frequency ωn of the
characteristic polynomial of...
For the closed-loop system shown, and given: C(s) 8.41 s+8.10 G(8 2 0.02 3.00 2out G(s) C(s) control plant Part A-Plant 1% settling time Find the 1% settling time of the plant G(s) to a unit step inp...
 For the closed-loop system shown, and given: C(s) 8.41 s+8.10 G(8 2 0.02 3.00 2out G(s) C(s) control plant Part A-Plant 1% settling time Find the 1% settling time of the plant G(s) to a unit step input. 15.38 t,3% - Submit X ncorrect; Try Again - Part B Plant: Overshoot Find the overshoot of the plant G(s)to a unit step input. Give your answer as a percentage Mp: | Value Units Submit Request Answer Part C - Closed-loop system:...
For the closed-loop system shown, and given: C(s) 8.41 s+8.10 G(8 2 0.02 3.00 2out G(s) C(s) control plant Part A-Plant 1% settling time Find the 1% settling time of the plant G(s) to a unit step input. 15.38 t,3% - Submit X ncorrect; Try Again - Part B Plant: Overshoot Find the overshoot of the plant G(s)to a unit step input. Give your answer as a percentage Mp: | Value Units Submit Request Answer Part C - Closed-loop system:...
Given the transfer function 4. G(s)H(s) - (s + 8) (s +6s + 13) (a) Sketch the root locus plot using Matlab. (b) Estimate the system gain when the damping ratio is 7 0.707 (c) Add a simple pole, (s...
 Given the transfer function 4. G(s)H(s) - (s + 8) (s +6s + 13) (a) Sketch the root locus plot using Matlab. (b) Estimate the system gain when the damping ratio is 7 0.707 (c) Add a simple pole, (s 2), to G (s)H (s) and examine the resulting root locus (d) Add a simple zero, (s +2), to G(s)H(s) and examine the resulting root locus
Given the transfer function 4. G(s)H(s) - (s + 8) (s +6s + 13)...
Given the transfer function 4. G(s)H(s) - (s + 8) (s +6s + 13) (a) Sketch the root locus plot using Matlab. (b) Estimate the system gain when the damping ratio is 7 0.707 (c) Add a simple pole, (s 2), to G (s)H (s) and examine the resulting root locus (d) Add a simple zero, (s +2), to G(s)H(s) and examine the resulting root locus
Given the transfer function 4. G(s)H(s) - (s + 8) (s +6s + 13)...
 For the system shown below, find the followings; (a) Make an accurate plot of the root locus (b) The value of K that gives a stable system with critically damped second-order poles (c ) The value of K that gives a marginally stable sytems Cs) (s-20s- I) 0.5 The characteristic equation (denominator of the closed-loop trans fer function set equal to zero) is given by
For the system shown below, find the followings; (a) Make an accurate plot of the...
For the system shown below, find the followings; (a) Make an accurate plot of the root locus (b) The value of K that gives a stable system with critically damped second-order poles (c ) The value of K that gives a marginally stable sytems Cs) (s-20s- I) 0.5 The characteristic equation (denominator of the closed-loop trans fer function set equal to zero) is given by
For the system shown below, find the followings; (a) Make an accurate plot of the...
 2. The transfer function of a CT LTI system is given by H(s) (s2 +6s +10) (s2 -4s +8) a) Draw the pole-zero plot of the transfer function. b) Show all possible ROC's associated with this transfer function. c) Obtain the impulse response h(t) associated with each ROC of the transfer function. d) Which one (if any) of the impulse responses of part c) is stable?
2. The transfer function of a CT LTI system is given by H(s) (s2...
2. The transfer function of a CT LTI system is given by H(s) (s2 +6s +10) (s2 -4s +8) a) Draw the pole-zero plot of the transfer function. b) Show all possible ROC's associated with this transfer function. c) Obtain the impulse response h(t) associated with each ROC of the transfer function. d) Which one (if any) of the impulse responses of part c) is stable?
2. The transfer function of a CT LTI system is given by H(s) (s2...
 Problem 4: Given the transfer function, 25pts 25 H(s) S2+6s 25 (a) (b) (c) Fi Find Please put the units. Find the poles of the system. Is this system overdamped, underdamped, the settling time, peak time, percent overshoot, and rise time. undamped or critically damped. Explain. nd the state space representation in phase variable form of the above transfer function H(s)
Problem 4: Given the transfer function, 25pts 25 H(s) S2+6s 25 (a) (b) (c) Fi Find Please put the units. Find the poles of the system. Is this system overdamped, underdamped, the settling time, peak time, percent overshoot, and rise time. undamped or critically damped. Explain. nd the state space representation in phase variable form of the above transfer function H(s)
 A second-order process is described by its transfer function G(s) = (s+1)(843) and a PI controller by Consider feedback control with unit feedback gain as shown in Figure 1 A disturbance D(s) exists, and to achieve zero steady-state error, a small integral component is applied. Technical limitations restrict the controller gain kp to values of 0.2 or less. The goal is to examine the influence of the controller parameter k on the dynamic response. D(s) Controller Process X(s) Y(s) Figure...
A second-order process is described by its transfer function G(s) = (s+1)(843) and a PI controller by Consider feedback control with unit feedback gain as shown in Figure 1 A disturbance D(s) exists, and to achieve zero steady-state error, a small integral component is applied. Technical limitations restrict the controller gain kp to values of 0.2 or less. The goal is to examine the influence of the controller parameter k on the dynamic response. D(s) Controller Process X(s) Y(s) Figure...
 For the given closed loop system, where:
C(s)= 9.43 s+ 9.56
G(s)= 87.84 / ( s2+ 2.94
s+ 9.00 )
Part A: Obtain the rise time of the step response of the plant
transfer function G(s).
Part B: Obtain the overshoot of the step response of the plant
transfer function G(s).
Part C: Obtain the 1% settling time of the step response of the
plant transfer function G(s).
Part D: Obtain the natural frequency ωn of the
characteristic polynomial of...
For the given closed loop system, where:
C(s)= 9.43 s+ 9.56
G(s)= 87.84 / ( s2+ 2.94
s+ 9.00 )
Part A: Obtain the rise time of the step response of the plant
transfer function G(s).
Part B: Obtain the overshoot of the step response of the plant
transfer function G(s).
Part C: Obtain the 1% settling time of the step response of the
plant transfer function G(s).
Part D: Obtain the natural frequency ωn of the
characteristic polynomial of...
 For the closed-loop system shown, and given: C(s) 8.41 s+8.10 G(8 2 0.02 3.00 2out G(s) C(s) control plant Part A-Plant 1% settling time Find the 1% settling time of the plant G(s) to a unit step input. 15.38 t,3% - Submit X ncorrect; Try Again - Part B Plant: Overshoot Find the overshoot of the plant G(s)to a unit step input. Give your answer as a percentage Mp: | Value Units Submit Request Answer Part C - Closed-loop system:...
For the closed-loop system shown, and given: C(s) 8.41 s+8.10 G(8 2 0.02 3.00 2out G(s) C(s) control plant Part A-Plant 1% settling time Find the 1% settling time of the plant G(s) to a unit step input. 15.38 t,3% - Submit X ncorrect; Try Again - Part B Plant: Overshoot Find the overshoot of the plant G(s)to a unit step input. Give your answer as a percentage Mp: | Value Units Submit Request Answer Part C - Closed-loop system:...
 Given the transfer function 4. G(s)H(s) - (s + 8) (s +6s + 13) (a) Sketch the root locus plot using Matlab. (b) Estimate the system gain when the damping ratio is 7 0.707 (c) Add a simple pole, (s 2), to G (s)H (s) and examine the resulting root locus (d) Add a simple zero, (s +2), to G(s)H(s) and examine the resulting root locus
Given the transfer function 4. G(s)H(s) - (s + 8) (s +6s + 13)...
Given the transfer function 4. G(s)H(s) - (s + 8) (s +6s + 13) (a) Sketch the root locus plot using Matlab. (b) Estimate the system gain when the damping ratio is 7 0.707 (c) Add a simple pole, (s 2), to G (s)H (s) and examine the resulting root locus (d) Add a simple zero, (s +2), to G(s)H(s) and examine the resulting root locus
Given the transfer function 4. G(s)H(s) - (s + 8) (s +6s + 13)...
Most questions answered within 3 hours.
-
Two particles each have a rest mass energy of 30 MeV and are
traveling with a...
asked 1 hour ago -
why
is vectorization a faster alternative to loops?
asked 2 hours ago -
General Matter’s outstanding bond issue has a coupon rate of
11.8%, and it sells at a...
asked 2 hours ago -
Write a one page essay on how important is it to know your basic
accounting knowledge...
asked 2 hours ago -
You are a Senior Civil Engineer posted at the Contracts and
Procurement Division of the Ministry...
asked 2 hours ago -
When using the percentage of completion method, the
company
- recognizes revenues and gross profit each...
asked 2 hours ago -
Is a level production strategy suitable for a pure service
industry, such as professional accounting and...
asked 2 hours ago -
Baker Industries’ net income is $23000, its interest expense is
$4000, and its tax rate is...
asked 3 hours ago -
a) A proton moves at 500 m/s in a 2 T magnetic field. What is
the...
asked 3 hours ago -
Anderson Systems is considering a project that has the following
cash flow and WACC data. What...
asked 3 hours ago -
MARIE Assembly Code Problem
For the following problem, please create new MARIE instructions
by providing the...
asked 3 hours ago -
Which ligands are similar to each other in how they bind to
metals?
A) methyl, amine,...
asked 3 hours ago