
Homework Answers


Add Answer to:
[0 111x1 -10-10」[22 T2 a) Design a state-feedback controller so that the closed-loop step response has an overshoot of less than 25% and a 1% settling time under 0.115 sec. b) Use MATLAB to verify t...
Please show all work and write neatly so that I can understand. Also please show MATLAB code so I can learn how to do this on my own. Problem 2 Consider a system 0 11 0 -10 T21 T2 T2 a) Design a stat...
 Please show all work and write neatly so that I can understand.
Also please show MATLAB code so I can learn how to do this on my
own.
Problem 2 Consider a system 0 11 0 -10 T21 T2 T2 a) Design a state-feedback controller so that the closed-loop step response has an overshoot of less than 25% and a 1% settling time under 0.115 sec. b) Usc MATLAB to verify that your design mects the specifications. If it docs...
Please show all work and write neatly so that I can understand.
Also please show MATLAB code so I can learn how to do this on my
own.
Problem 2 Consider a system 0 11 0 -10 T21 T2 T2 a) Design a state-feedback controller so that the closed-loop step response has an overshoot of less than 25% and a 1% settling time under 0.115 sec. b) Usc MATLAB to verify that your design mects the specifications. If it docs...
a. Design a state feedback controller with integral control to yield a 10% overshoot and a...
a. Design a state feedback controller with integral control to yield a 10% overshoot and a settling time of 0.5 sec. (tip: place the third pole to have the same real part as the two dominant, complex poles.) b. Assume that the system is initially relaxed at t=0. With the controller design in (c), what is the steady-state response y(t) excited by the unit step reference signal r(t)=1, for .
Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%....
 Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
Design Project #1 : Design of PID Controller Design a PID controller so that the step...
 Design Project #1 : Design of PID Controller Design a PID controller so that the step response of the following closed-loop system satisfy (settling time) 3sec, POS(% overshoot) 20%, and steady state tracking error (ess)<0. R(s) Y(s) K, ss +1 If you can reduce both settling time and overshoot, then it would be much better. To verify your answer, you should use Matlab simulink and show that your answer is correct in your report. Describe the detailed design procedure (as...
Design Project #1 : Design of PID Controller Design a PID controller so that the step response of the following closed-loop system satisfy (settling time) 3sec, POS(% overshoot) 20%, and steady state tracking error (ess)<0. R(s) Y(s) K, ss +1 If you can reduce both settling time and overshoot, then it would be much better. To verify your answer, you should use Matlab simulink and show that your answer is correct in your report. Describe the detailed design procedure (as...
Design a compensator for the system below to provide a closed-loop response that satisfies the following requirements: Steady state error=0 for a constant reference, Percent Overshoot≈5%, Settling Tim...
Design a compensator for the system below to provide a closed-loop response that satisfies the following requirements: Steady state error=0 for a constant reference, Percent Overshoot≈5%, Settling Time≈1.2
I required to design a PID controller that has overshoot less than 10% with minimise rise...
 I required to design a PID controller that has overshoot less
than 10% with minimise rise time, settling time, peak time and
steady-state error.
The transfer function of the plant is shown below:
and the step response of the open loop system by using unit-step
is shown below:
Then I have designed my PID controller by referring to the
example from Modern Control Engineering 5th Edition by Katsuhiko
Ogata page 572 by using Ziegler Nichols 2nd Method.
I get Kcr...
I required to design a PID controller that has overshoot less
than 10% with minimise rise time, settling time, peak time and
steady-state error.
The transfer function of the plant is shown below:
and the step response of the open loop system by using unit-step
is shown below:
Then I have designed my PID controller by referring to the
example from Modern Control Engineering 5th Edition by Katsuhiko
Ogata page 572 by using Ziegler Nichols 2nd Method.
I get Kcr...
1. [25%] Consider the closed-loop system shown where it is desired to stabilize the system with...
 1. [25%] Consider the closed-loop system shown where it is desired to stabilize the system with feedback where the control law is a form of a PID controller. Design using the Root Locus Method such that the: a. percent overshoot is less than 10% for a unit step b. settling time is less than 4 seconds, c. steady-state absolute error (not percent error) due to a unit ramp input (r=t) is less than 1. d. Note: The actuator u(t) saturates...
1. [25%] Consider the closed-loop system shown where it is desired to stabilize the system with feedback where the control law is a form of a PID controller. Design using the Root Locus Method such that the: a. percent overshoot is less than 10% for a unit step b. settling time is less than 4 seconds, c. steady-state absolute error (not percent error) due to a unit ramp input (r=t) is less than 1. d. Note: The actuator u(t) saturates...
Consider the same plant G(s) Design a controller so that if you desire an angle of...
 Consider the same plant G(s) Design a controller so that if you desire an angle of r 1 rad, s(s+10) (s+20) (R the actual angle of the motor y(t) has an overshoot less than or equal to 20% and a settling time less than or equal to 0.3s as it is settling down to the steady state angle. Write down the steps you followed in the sisotool (or otherwise), include: i. ii. iii. iv. Your error calculations and calculations for...
Consider the same plant G(s) Design a controller so that if you desire an angle of r 1 rad, s(s+10) (s+20) (R the actual angle of the motor y(t) has an overshoot less than or equal to 20% and a settling time less than or equal to 0.3s as it is settling down to the steady state angle. Write down the steps you followed in the sisotool (or otherwise), include: i. ii. iii. iv. Your error calculations and calculations for...
Given the following open loop plant: 48 G(s) s +2) (s+4)(s +6) (a) Design a state feedback contro...
 Need help with this problem asap, will rate it. Thank you.
Given the following open loop plant: 48 G(s) s +2) (s+4)(s +6) (a) Design a state feedback controller to yield a 20% overshoot and a settling time of 1 second (2%). Place the third pole 10 times farther from the imaginary axis than the dominant pole pair (b) Determine the pre-filter constant N needed to reduce the steady-state error to a unit step input for the closed-loop system. (c)...
Need help with this problem asap, will rate it. Thank you.
Given the following open loop plant: 48 G(s) s +2) (s+4)(s +6) (a) Design a state feedback controller to yield a 20% overshoot and a settling time of 1 second (2%). Place the third pole 10 times farther from the imaginary axis than the dominant pole pair (b) Determine the pre-filter constant N needed to reduce the steady-state error to a unit step input for the closed-loop system. (c)...
3. Consider a system with the following state equation h(t)] [0 0 21 [X1(t) [x1(t) y(t)...
 3. Consider a system with the following state equation h(t)] [0 0 21 [X1(t) [x1(t) y(t) [0.1 0 0.1x2(t) X3(t) The unit step response is required to have a settling time of less than 2 seconds and a percent overshoot of less than 5%. In addition a zero steady-state error is needed. The goal is to design the state feedback control law in the form of u(t) Kx(t) + Gr(t) (a) Find the desired regon of the S-plane for two...
3. Consider a system with the following state equation h(t)] [0 0 21 [X1(t) [x1(t) y(t) [0.1 0 0.1x2(t) X3(t) The unit step response is required to have a settling time of less than 2 seconds and a percent overshoot of less than 5%. In addition a zero steady-state error is needed. The goal is to design the state feedback control law in the form of u(t) Kx(t) + Gr(t) (a) Find the desired regon of the S-plane for two...
 Please show all work and write neatly so that I can understand.
Also please show MATLAB code so I can learn how to do this on my
own.
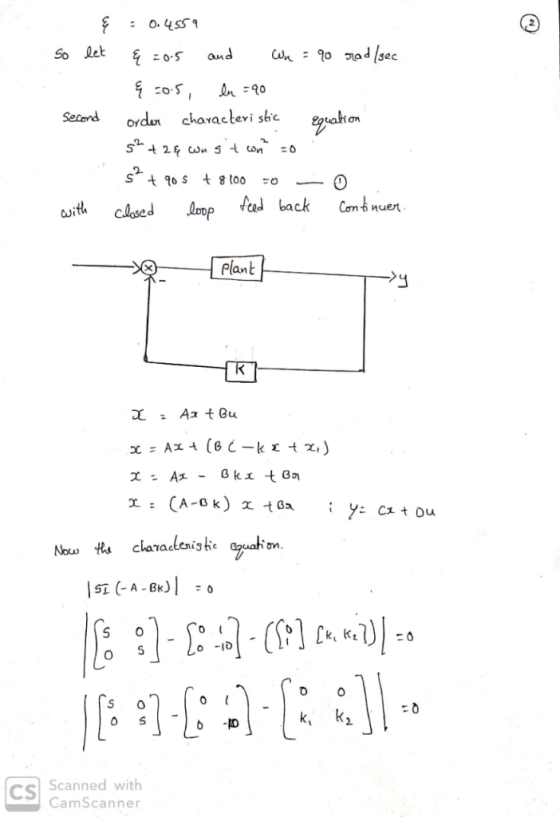
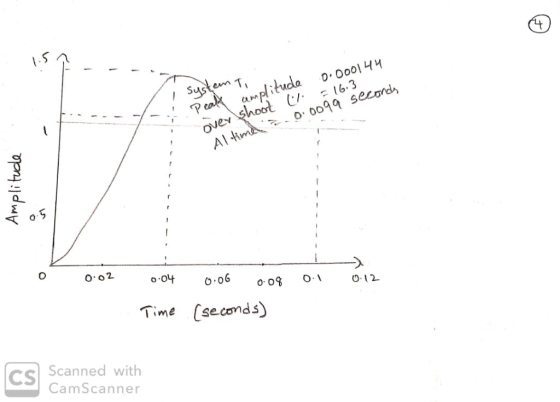
Problem 2 Consider a system 0 11 0 -10 T21 T2 T2 a) Design a state-feedback controller so that the closed-loop step response has an overshoot of less than 25% and a 1% settling time under 0.115 sec. b) Usc MATLAB to verify that your design mects the specifications. If it docs...
Please show all work and write neatly so that I can understand.
Also please show MATLAB code so I can learn how to do this on my
own.
Problem 2 Consider a system 0 11 0 -10 T21 T2 T2 a) Design a state-feedback controller so that the closed-loop step response has an overshoot of less than 25% and a 1% settling time under 0.115 sec. b) Usc MATLAB to verify that your design mects the specifications. If it docs...
 Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
 Design Project #1 : Design of PID Controller Design a PID controller so that the step response of the following closed-loop system satisfy (settling time) 3sec, POS(% overshoot) 20%, and steady state tracking error (ess)<0. R(s) Y(s) K, ss +1 If you can reduce both settling time and overshoot, then it would be much better. To verify your answer, you should use Matlab simulink and show that your answer is correct in your report. Describe the detailed design procedure (as...
Design Project #1 : Design of PID Controller Design a PID controller so that the step response of the following closed-loop system satisfy (settling time) 3sec, POS(% overshoot) 20%, and steady state tracking error (ess)<0. R(s) Y(s) K, ss +1 If you can reduce both settling time and overshoot, then it would be much better. To verify your answer, you should use Matlab simulink and show that your answer is correct in your report. Describe the detailed design procedure (as...
 I required to design a PID controller that has overshoot less
than 10% with minimise rise time, settling time, peak time and
steady-state error.
The transfer function of the plant is shown below:
and the step response of the open loop system by using unit-step
is shown below:
Then I have designed my PID controller by referring to the
example from Modern Control Engineering 5th Edition by Katsuhiko
Ogata page 572 by using Ziegler Nichols 2nd Method.
I get Kcr...
I required to design a PID controller that has overshoot less
than 10% with minimise rise time, settling time, peak time and
steady-state error.
The transfer function of the plant is shown below:
and the step response of the open loop system by using unit-step
is shown below:
Then I have designed my PID controller by referring to the
example from Modern Control Engineering 5th Edition by Katsuhiko
Ogata page 572 by using Ziegler Nichols 2nd Method.
I get Kcr...
 1. [25%] Consider the closed-loop system shown where it is desired to stabilize the system with feedback where the control law is a form of a PID controller. Design using the Root Locus Method such that the: a. percent overshoot is less than 10% for a unit step b. settling time is less than 4 seconds, c. steady-state absolute error (not percent error) due to a unit ramp input (r=t) is less than 1. d. Note: The actuator u(t) saturates...
1. [25%] Consider the closed-loop system shown where it is desired to stabilize the system with feedback where the control law is a form of a PID controller. Design using the Root Locus Method such that the: a. percent overshoot is less than 10% for a unit step b. settling time is less than 4 seconds, c. steady-state absolute error (not percent error) due to a unit ramp input (r=t) is less than 1. d. Note: The actuator u(t) saturates...
 Consider the same plant G(s) Design a controller so that if you desire an angle of r 1 rad, s(s+10) (s+20) (R the actual angle of the motor y(t) has an overshoot less than or equal to 20% and a settling time less than or equal to 0.3s as it is settling down to the steady state angle. Write down the steps you followed in the sisotool (or otherwise), include: i. ii. iii. iv. Your error calculations and calculations for...
Consider the same plant G(s) Design a controller so that if you desire an angle of r 1 rad, s(s+10) (s+20) (R the actual angle of the motor y(t) has an overshoot less than or equal to 20% and a settling time less than or equal to 0.3s as it is settling down to the steady state angle. Write down the steps you followed in the sisotool (or otherwise), include: i. ii. iii. iv. Your error calculations and calculations for...
 Need help with this problem asap, will rate it. Thank you.
Given the following open loop plant: 48 G(s) s +2) (s+4)(s +6) (a) Design a state feedback controller to yield a 20% overshoot and a settling time of 1 second (2%). Place the third pole 10 times farther from the imaginary axis than the dominant pole pair (b) Determine the pre-filter constant N needed to reduce the steady-state error to a unit step input for the closed-loop system. (c)...
Need help with this problem asap, will rate it. Thank you.
Given the following open loop plant: 48 G(s) s +2) (s+4)(s +6) (a) Design a state feedback controller to yield a 20% overshoot and a settling time of 1 second (2%). Place the third pole 10 times farther from the imaginary axis than the dominant pole pair (b) Determine the pre-filter constant N needed to reduce the steady-state error to a unit step input for the closed-loop system. (c)...
 3. Consider a system with the following state equation h(t)] [0 0 21 [X1(t) [x1(t) y(t) [0.1 0 0.1x2(t) X3(t) The unit step response is required to have a settling time of less than 2 seconds and a percent overshoot of less than 5%. In addition a zero steady-state error is needed. The goal is to design the state feedback control law in the form of u(t) Kx(t) + Gr(t) (a) Find the desired regon of the S-plane for two...
3. Consider a system with the following state equation h(t)] [0 0 21 [X1(t) [x1(t) y(t) [0.1 0 0.1x2(t) X3(t) The unit step response is required to have a settling time of less than 2 seconds and a percent overshoot of less than 5%. In addition a zero steady-state error is needed. The goal is to design the state feedback control law in the form of u(t) Kx(t) + Gr(t) (a) Find the desired regon of the S-plane for two...
Most questions answered within 3 hours.
-
Determine the temperature (in Celsius) at which 1.00 mole of an
ideal gas will have a...
asked 21 minutes ago -
Japan’s combination of X and Y
Canada’s combination of X and Y
100x and 0y
50x...
asked 13 minutes ago -
[1] Household statistics include individuals living alone or in
groups in:
A) apartments.
B) military barracks....
asked 24 minutes ago -
What is the % w/v when 80 mL of a 2.0% solution is mixed with 50...
asked 27 minutes ago -
How can I solve the following using a TI83
Claim: Most adults would erase all of...
asked 40 minutes ago -
Analysis of 3-ethyl-3-buten-2-ol gave C, 72.13%; H, 11.92%.
Calculate the percent deviation of these results from...
asked 37 minutes ago -
Which VALS segment is most likely to have a top of the line
brand new (2015)...
asked 41 minutes ago -
Write a program to score the paper-rock-scissor game. Each of
two users types in either P,R...
asked 1 hour ago -
Calculate the equillibrium constent K for a redox reaction that
has E°cell = -.98 V at...
asked 1 hour ago -
A concave spherical mirror has a radius of curvature of
magnitude 19.6 cm.
(a) Find the...
asked 1 hour ago -
3. draw a diagram of the magnetic field:
a. around a long straight wire with a...
asked 1 hour ago -
If you titrated 30.0 mL of 0.1 M HCl with 0.1 M NaOH, indicate
the approximate...
asked 1 hour ago