Please show all work and write neatly so that I can understand.
Also please show MATLAB code so I can learn how to do this on my
own. 
Homework Answers



Add Answer to:
Please show all work and write neatly so that I can understand. Also please show MATLAB code so I can learn how to do this on my own. Problem 2 Consider a system 0 11 0 -10 T21 T2 T2 a) Design a stat...
[0 111x1 -10-10」[22 T2 a) Design a state-feedback controller so that the closed-loop step response has an overshoot of less than 25% and a 1% settling time under 0.115 sec. b) Use MATLAB to verify t...
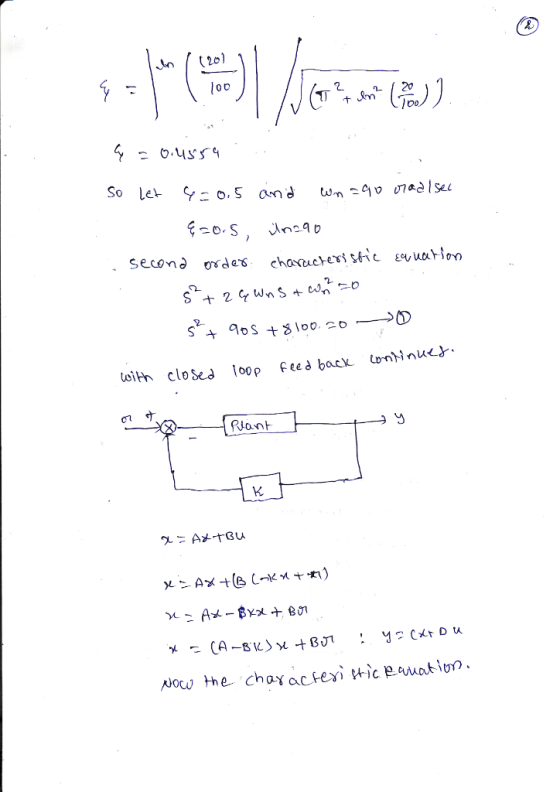
 [0 111x1 -10-10」[22 T2 a) Design a state-feedback controller so that the closed-loop step response has an overshoot of less than 25% and a 1% settling time under 0.115 sec. b) Use MATLAB to verify that your design meets the specifications. If it does not, modify your feedback gains accordingly.
[0 111x1 -10-10」[22 T2 a) Design a state-feedback controller so that the closed-loop step response has an overshoot of less than 25% and a 1% settling time under 0.115 sec....
[0 111x1 -10-10」[22 T2 a) Design a state-feedback controller so that the closed-loop step response has an overshoot of less than 25% and a 1% settling time under 0.115 sec. b) Use MATLAB to verify that your design meets the specifications. If it does not, modify your feedback gains accordingly.
[0 111x1 -10-10」[22 T2 a) Design a state-feedback controller so that the closed-loop step response has an overshoot of less than 25% and a 1% settling time under 0.115 sec....
Design Project #1 : Design of PID Controller Design a PID controller so that the step...
 Design Project #1 : Design of PID Controller Design a PID controller so that the step response of the following closed-loop system satisfy (settling time) 3sec, POS(% overshoot) 20%, and steady state tracking error (ess)<0. R(s) Y(s) K, ss +1 If you can reduce both settling time and overshoot, then it would be much better. To verify your answer, you should use Matlab simulink and show that your answer is correct in your report. Describe the detailed design procedure (as...
Design Project #1 : Design of PID Controller Design a PID controller so that the step response of the following closed-loop system satisfy (settling time) 3sec, POS(% overshoot) 20%, and steady state tracking error (ess)<0. R(s) Y(s) K, ss +1 If you can reduce both settling time and overshoot, then it would be much better. To verify your answer, you should use Matlab simulink and show that your answer is correct in your report. Describe the detailed design procedure (as...
on Matlab please!!!! Problem 1- (a) Design a controller for a plant with transfer function, G(s)-(+ to obtain (i) estep(00)s 0, (ii) T12%) < 1 s, and (iii) an-5 rad/s (4 points). (b) Plot the u...
 on Matlab please!!!!
Problem 1- (a) Design a controller for a plant with transfer function, G(s)-(+ to obtain (i) estep(00)s 0, (ii) T12%) < 1 s, and (iii) an-5 rad/s (4 points). (b) Plot the unit step response of the closed-loop system you design and find the percentage of overshoot, the time to the first peak, settling time and eramp[oo) (4 points). (c) Can you modify your design, without compromising design specifications, in order to further shorten T1296) while keeping...
on Matlab please!!!!
Problem 1- (a) Design a controller for a plant with transfer function, G(s)-(+ to obtain (i) estep(00)s 0, (ii) T12%) < 1 s, and (iii) an-5 rad/s (4 points). (b) Plot the unit step response of the closed-loop system you design and find the percentage of overshoot, the time to the first peak, settling time and eramp[oo) (4 points). (c) Can you modify your design, without compromising design specifications, in order to further shorten T1296) while keeping...
Please show all work and write neatly so that I can understand. All information is given Problem 4 The state-space equations for the simple pendulum is 0 1 25 02 T2 C2 a) Design a state feedback con...
 Please show all work and write neatly so that I can understand.
All
information is given
Problem 4 The state-space equations for the simple pendulum is 0 1 25 02 T2 C2 a) Design a state feedback controller such that the roots of the closed-loop characteristic equation arc at s-41 4j b) Design an estimator that reconstructs the state of the pendulum. Pick the estimator roots to be at s--10 ± 10, (Make sure to provide the dynamics equation of...
Please show all work and write neatly so that I can understand.
All
information is given
Problem 4 The state-space equations for the simple pendulum is 0 1 25 02 T2 C2 a) Design a state feedback controller such that the roots of the closed-loop characteristic equation arc at s-41 4j b) Design an estimator that reconstructs the state of the pendulum. Pick the estimator roots to be at s--10 ± 10, (Make sure to provide the dynamics equation of...
Consider the following system: -1-2-21 гг 1 0 1 L Where u is the system input and y is the measur...
 control system with observer
Consider the following system: -1-2-21 гг 1 0 1 L Where u is the system input and y is the measured output. 1. Find the transfer function of the system. 2. Design a state feedback controller with a full-state observer such that the step response of the closed loop system is second order dominant with an overshoot Mp settling time ts s 5 sec. Represent the observer-based control system in a compact state space form. 10%...
control system with observer
Consider the following system: -1-2-21 гг 1 0 1 L Where u is the system input and y is the measured output. 1. Find the transfer function of the system. 2. Design a state feedback controller with a full-state observer such that the step response of the closed loop system is second order dominant with an overshoot Mp settling time ts s 5 sec. Represent the observer-based control system in a compact state space form. 10%...
Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%....
 Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
Write as MATLAB code with comments thank you. The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t) Ct, smaller than 0...
 Write as MATLAB code with comments thank you.
The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t) Ct, smaller than 0.01C. Here, C is a constant. The overshoot for step input must be such that P.0.S 5% and the settling time with a 2% error should be T. 2 seconds. (a) Based on rlocus function, write a piece of MATLAB code which establishes the controller. (b)...
Write as MATLAB code with comments thank you.
The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t) Ct, smaller than 0.01C. Here, C is a constant. The overshoot for step input must be such that P.0.S 5% and the settling time with a 2% error should be T. 2 seconds. (a) Based on rlocus function, write a piece of MATLAB code which establishes the controller. (b)...
Please do what the top question asks. Question from textbook is for reference. Problem 3.27: You...
 Please do what the top question asks. Question from textbook is
for reference.
Problem 3.27: You must find K and a. In addition: (i) plot the admissible domain corresponding to the specs, and (ii) plot, using Matlab, the step response of your closed loop system with K and a that you computed (don't forget to title your plot with your name and mark your axes) sPs to 327 For the unity feedback system shown in Fig. 3.55, specify the gain...
Please do what the top question asks. Question from textbook is
for reference.
Problem 3.27: You must find K and a. In addition: (i) plot the admissible domain corresponding to the specs, and (ii) plot, using Matlab, the step response of your closed loop system with K and a that you computed (don't forget to title your plot with your name and mark your axes) sPs to 327 For the unity feedback system shown in Fig. 3.55, specify the gain...
Questions 14-17: For the control system shown below Design the compensator so that the unit-step response...
 Questions 14-17: For the control system shown below Design the compensator so that the unit-step response has a settling-time ofless then twe seconds, rise-time of less th 025seconds, and overshoot ofless than 29%1, adion maximum value ofthe actuator signal ) must be kept under five14) Indicate the allowable region of the complex plane for the closed-loop poles 15) Deterine K and a, the answers are nos unique). 16.) Use Matlab to plot the step-response of the control system using your...
Questions 14-17: For the control system shown below Design the compensator so that the unit-step response has a settling-time ofless then twe seconds, rise-time of less th 025seconds, and overshoot ofless than 29%1, adion maximum value ofthe actuator signal ) must be kept under five14) Indicate the allowable region of the complex plane for the closed-loop poles 15) Deterine K and a, the answers are nos unique). 16.) Use Matlab to plot the step-response of the control system using your...
Please help as much as you can, I want to use this probem as a study guide for the final so any and all help / code is super appreciatted. Thanks Consider a simple direct current motor with transfer...
 Please help as much as you can, I want to use this probem as a
study guide for the final so any and all help / code is super
appreciatted. Thanks
Consider a simple direct current motor with transfer function 10 P(s) = 2s2+s (a) Plot a Bode plot for the plant's transfer function. (b) Design a PD-controller that gives a closed loop bandwidth, wBw, of at least 10 rad/sec and has a phase margin of at least 30°· Using...
Please help as much as you can, I want to use this probem as a
study guide for the final so any and all help / code is super
appreciatted. Thanks
Consider a simple direct current motor with transfer function 10 P(s) = 2s2+s (a) Plot a Bode plot for the plant's transfer function. (b) Design a PD-controller that gives a closed loop bandwidth, wBw, of at least 10 rad/sec and has a phase margin of at least 30°· Using...
 [0 111x1 -10-10」[22 T2 a) Design a state-feedback controller so that the closed-loop step response has an overshoot of less than 25% and a 1% settling time under 0.115 sec. b) Use MATLAB to verify that your design meets the specifications. If it does not, modify your feedback gains accordingly.
[0 111x1 -10-10」[22 T2 a) Design a state-feedback controller so that the closed-loop step response has an overshoot of less than 25% and a 1% settling time under 0.115 sec....
[0 111x1 -10-10」[22 T2 a) Design a state-feedback controller so that the closed-loop step response has an overshoot of less than 25% and a 1% settling time under 0.115 sec. b) Use MATLAB to verify that your design meets the specifications. If it does not, modify your feedback gains accordingly.
[0 111x1 -10-10」[22 T2 a) Design a state-feedback controller so that the closed-loop step response has an overshoot of less than 25% and a 1% settling time under 0.115 sec....
 Design Project #1 : Design of PID Controller Design a PID controller so that the step response of the following closed-loop system satisfy (settling time) 3sec, POS(% overshoot) 20%, and steady state tracking error (ess)<0. R(s) Y(s) K, ss +1 If you can reduce both settling time and overshoot, then it would be much better. To verify your answer, you should use Matlab simulink and show that your answer is correct in your report. Describe the detailed design procedure (as...
Design Project #1 : Design of PID Controller Design a PID controller so that the step response of the following closed-loop system satisfy (settling time) 3sec, POS(% overshoot) 20%, and steady state tracking error (ess)<0. R(s) Y(s) K, ss +1 If you can reduce both settling time and overshoot, then it would be much better. To verify your answer, you should use Matlab simulink and show that your answer is correct in your report. Describe the detailed design procedure (as...
 on Matlab please!!!!
Problem 1- (a) Design a controller for a plant with transfer function, G(s)-(+ to obtain (i) estep(00)s 0, (ii) T12%) < 1 s, and (iii) an-5 rad/s (4 points). (b) Plot the unit step response of the closed-loop system you design and find the percentage of overshoot, the time to the first peak, settling time and eramp[oo) (4 points). (c) Can you modify your design, without compromising design specifications, in order to further shorten T1296) while keeping...
on Matlab please!!!!
Problem 1- (a) Design a controller for a plant with transfer function, G(s)-(+ to obtain (i) estep(00)s 0, (ii) T12%) < 1 s, and (iii) an-5 rad/s (4 points). (b) Plot the unit step response of the closed-loop system you design and find the percentage of overshoot, the time to the first peak, settling time and eramp[oo) (4 points). (c) Can you modify your design, without compromising design specifications, in order to further shorten T1296) while keeping...
 Please show all work and write neatly so that I can understand.
All
information is given
Problem 4 The state-space equations for the simple pendulum is 0 1 25 02 T2 C2 a) Design a state feedback controller such that the roots of the closed-loop characteristic equation arc at s-41 4j b) Design an estimator that reconstructs the state of the pendulum. Pick the estimator roots to be at s--10 ± 10, (Make sure to provide the dynamics equation of...
Please show all work and write neatly so that I can understand.
All
information is given
Problem 4 The state-space equations for the simple pendulum is 0 1 25 02 T2 C2 a) Design a state feedback controller such that the roots of the closed-loop characteristic equation arc at s-41 4j b) Design an estimator that reconstructs the state of the pendulum. Pick the estimator roots to be at s--10 ± 10, (Make sure to provide the dynamics equation of...
 control system with observer
Consider the following system: -1-2-21 гг 1 0 1 L Where u is the system input and y is the measured output. 1. Find the transfer function of the system. 2. Design a state feedback controller with a full-state observer such that the step response of the closed loop system is second order dominant with an overshoot Mp settling time ts s 5 sec. Represent the observer-based control system in a compact state space form. 10%...
control system with observer
Consider the following system: -1-2-21 гг 1 0 1 L Where u is the system input and y is the measured output. 1. Find the transfer function of the system. 2. Design a state feedback controller with a full-state observer such that the step response of the closed loop system is second order dominant with an overshoot Mp settling time ts s 5 sec. Represent the observer-based control system in a compact state space form. 10%...
 Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
 Write as MATLAB code with comments thank you.
The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t) Ct, smaller than 0.01C. Here, C is a constant. The overshoot for step input must be such that P.0.S 5% and the settling time with a 2% error should be T. 2 seconds. (a) Based on rlocus function, write a piece of MATLAB code which establishes the controller. (b)...
Write as MATLAB code with comments thank you.
The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t) Ct, smaller than 0.01C. Here, C is a constant. The overshoot for step input must be such that P.0.S 5% and the settling time with a 2% error should be T. 2 seconds. (a) Based on rlocus function, write a piece of MATLAB code which establishes the controller. (b)...
 Please do what the top question asks. Question from textbook is
for reference.
Problem 3.27: You must find K and a. In addition: (i) plot the admissible domain corresponding to the specs, and (ii) plot, using Matlab, the step response of your closed loop system with K and a that you computed (don't forget to title your plot with your name and mark your axes) sPs to 327 For the unity feedback system shown in Fig. 3.55, specify the gain...
Please do what the top question asks. Question from textbook is
for reference.
Problem 3.27: You must find K and a. In addition: (i) plot the admissible domain corresponding to the specs, and (ii) plot, using Matlab, the step response of your closed loop system with K and a that you computed (don't forget to title your plot with your name and mark your axes) sPs to 327 For the unity feedback system shown in Fig. 3.55, specify the gain...
 Questions 14-17: For the control system shown below Design the compensator so that the unit-step response has a settling-time ofless then twe seconds, rise-time of less th 025seconds, and overshoot ofless than 29%1, adion maximum value ofthe actuator signal ) must be kept under five14) Indicate the allowable region of the complex plane for the closed-loop poles 15) Deterine K and a, the answers are nos unique). 16.) Use Matlab to plot the step-response of the control system using your...
Questions 14-17: For the control system shown below Design the compensator so that the unit-step response has a settling-time ofless then twe seconds, rise-time of less th 025seconds, and overshoot ofless than 29%1, adion maximum value ofthe actuator signal ) must be kept under five14) Indicate the allowable region of the complex plane for the closed-loop poles 15) Deterine K and a, the answers are nos unique). 16.) Use Matlab to plot the step-response of the control system using your...
 Please help as much as you can, I want to use this probem as a
study guide for the final so any and all help / code is super
appreciatted. Thanks
Consider a simple direct current motor with transfer function 10 P(s) = 2s2+s (a) Plot a Bode plot for the plant's transfer function. (b) Design a PD-controller that gives a closed loop bandwidth, wBw, of at least 10 rad/sec and has a phase margin of at least 30°· Using...
Please help as much as you can, I want to use this probem as a
study guide for the final so any and all help / code is super
appreciatted. Thanks
Consider a simple direct current motor with transfer function 10 P(s) = 2s2+s (a) Plot a Bode plot for the plant's transfer function. (b) Design a PD-controller that gives a closed loop bandwidth, wBw, of at least 10 rad/sec and has a phase margin of at least 30°· Using...
Most questions answered within 3 hours.
-
a. Discuss the reciprocal/opposite “hormonal” regulation of the
most highly regulated steps of these two pathways....
asked 9 minutes ago -
Suppose a floor on a hospital has 12 physicians at any given
time. You are brought...
asked 2 minutes ago -
Members of unions had mounted campaigns to persuade customers
not to shop at a company because...
asked 10 minutes ago -
Why is the alpha carboxyl group pka value 2 ?
And why is an alpha amino...
asked 19 minutes ago -
Identify and assess an intrapreneurial
opportunities within Bank of America and
intrapreneurial assessment. Assess its impact...
asked 25 minutes ago -
How do I figure out the range of possible numbers that can be
represented by the...
asked 26 minutes ago -
A 0.48-kg metal sphere oscillates at the end of a vertical
spring. As the spring stretches...
asked 30 minutes ago -
If a block of Si is doped with 10^17 Boron atom/cm^3 and 5X10^16
Arsenic atoms/cm^3,
(a)...
asked 56 minutes ago -
Why would natural selection not minimize costs (in the form of
symptoms) of evolved defenses? (choose...
asked 1 hour ago -
What is true about a critical task?
Latest finish time - latest start time = 0...
asked 1 hour ago -
A company uses a
process costing system. Its Assembly Department's beginning
inventory consisted of 56,800 units,...
asked 1 hour ago -
a
sealed glass cylinder contains 325 g of N2 gas at 1.02 atm at 20 c....
asked 1 hour ago