Question
please help with part B of question
Homework Answers
Answer #1
The manipulator is planar, There is only one translation along X axis between the links apart from joint rotation.





Given:


and 
which gives:


square and add





Now consider:



by observation we get



cl -s10 11cl s パ 0 1s1
c2 -s2 0 12c2 1s2 c2 0 12s2 T:
2 CS01 0010 s2 e2 0 0 2200 CS 1 C 0 0 1 0010 1100 1100 T2
c12 -s12 0 11c1 12c12 s12 c12 0 1s112s12 0 0
We were unable to transcribe this image
We were unable to transcribe this image
We were unable to transcribe this image
11 = 2: 12 = 1
We were unable to transcribe this image
We were unable to transcribe this image
We were unable to transcribe this image
We were unable to transcribe this image
We were unable to transcribe this image
We were unable to transcribe this image
We were unable to transcribe this image
We were unable to transcribe this image
2cosĄ + cos(θ1 ) cos45-sin ( θί ) sin 45-V (2)
We were unable to transcribe this image
We were unable to transcribe this image
We were unable to transcribe this image
We were unable to transcribe this image
Know the answer?
Add Answer to:
please help with part B of question b) A planar manipulator has link lengths L1 2m and L2-1 m.Use the inverse kinematic equations to find the joint angles which will place the end point at the fol...
Not the answer you're looking for?
Ask your own homework help question.
Our experts will answer your question WITHIN MINUTES for Free.
Similar Homework Help Questions
please need assistance on part B of the question b) A planar manipulator has link lengths L1 2m and L2-1 m.Use the inverse kinematic equations to find the joint angles which will place the end poi...
 please need assistance on part B of the question
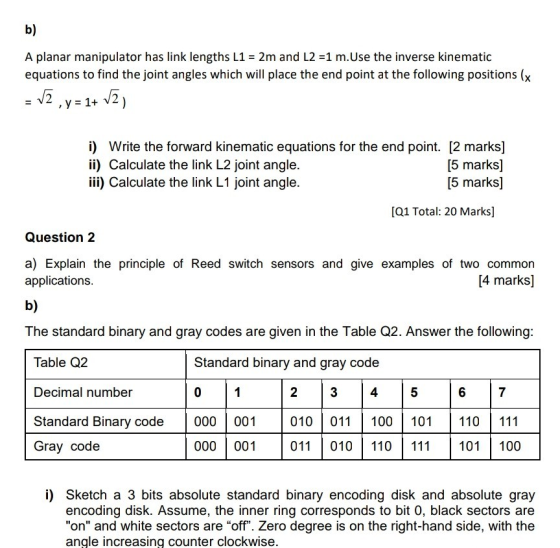
b) A planar manipulator has link lengths L1 2m and L2-1 m.Use the inverse kinematic equations to find the joint angles which will place the end point at the following positions (x V2 i) Write the forward kinematic equations for the end point. [2 marks] ii) Calculate the link L2 joint angle iii) Calculate the link L1 joint angle [5 marks] [5 marks] [Q1 Total: 20 Marks] Question 2 a) Explain...
please need assistance on part B of the question
b) A planar manipulator has link lengths L1 2m and L2-1 m.Use the inverse kinematic equations to find the joint angles which will place the end point at the following positions (x V2 i) Write the forward kinematic equations for the end point. [2 marks] ii) Calculate the link L2 joint angle iii) Calculate the link L1 joint angle [5 marks] [5 marks] [Q1 Total: 20 Marks] Question 2 a) Explain...
 please need assistance on part B of the question
b) A planar manipulator has link lengths L1 2m and L2-1 m.Use the inverse kinematic equations to find the joint angles which will place the end point at the following positions (x V2 i) Write the forward kinematic equations for the end point. [2 marks] ii) Calculate the link L2 joint angle iii) Calculate the link L1 joint angle [5 marks] [5 marks] [Q1 Total: 20 Marks] Question 2 a) Explain...
please need assistance on part B of the question
b) A planar manipulator has link lengths L1 2m and L2-1 m.Use the inverse kinematic equations to find the joint angles which will place the end point at the following positions (x V2 i) Write the forward kinematic equations for the end point. [2 marks] ii) Calculate the link L2 joint angle iii) Calculate the link L1 joint angle [5 marks] [5 marks] [Q1 Total: 20 Marks] Question 2 a) Explain...
ADVERTISEMENT
Need Online Homework Help?
Ask
a QuestionGet Answers For Free
Most questions answered within 3 hours.
Most questions answered within 3 hours.
ADVERTISEMENT
ADVERTISEMENT
Active Questions
-
10. Complete the table below
only using hexadecimal numbers:
AL CODE
EBX
EAX
[EAX]
mov eax,...
asked 16 minutes ago -
trust is best established through the combination of ------and
------- .
1. magnanimity and justice
2....
asked 31 minutes ago -
Blood pressure is normally taken on the upper arm at the level
of the heart. Suppose,...
asked 30 minutes ago -
Suppose that the satellite around the earth has an orbit that is
24 KM larger in...
asked 33 minutes ago -
Calculate the [OH (aq)] in limes which have a [H3O*(aq)] of 1.3 x
10 mol/L
asked 31 minutes ago -
A nozzle with a radius of 0.250 cm is attached to a garden hose
with a...
asked 43 minutes ago -
PLEASE do not use any loops for the program; only recursion is
allowed
4. Write a...
asked 51 minutes ago -
Please help me with me. I did the first part to write the operations but in...
asked 48 minutes ago -
Use Cryptool to find the Cryptographic SHA-1 hash value of the
string "abc". The calculator is...
asked 53 minutes ago -
You are attempting to calculate a firm’s free cash flow to
equity. You know the following...
asked 1 hour ago -
the following reaction occurs in a balloon containing
N2O2 gas
N2O4(g)=2NO2(g)
will the volume of the...
asked 2 hours ago -
answer the questions throughout this program
public class Day implements Comparable {
Private Boolean atWork;...
asked 2 hours ago
ADVERTISEMENT