
Homework Answers
Solution:3(a)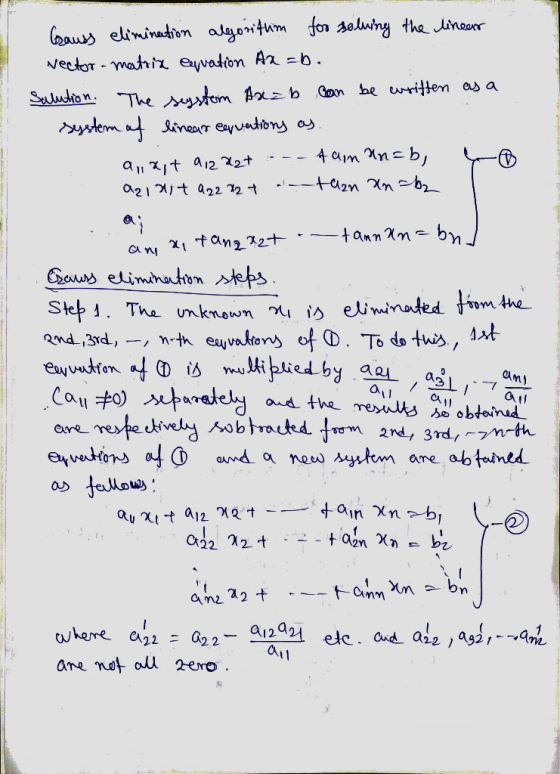


Add Answer to:
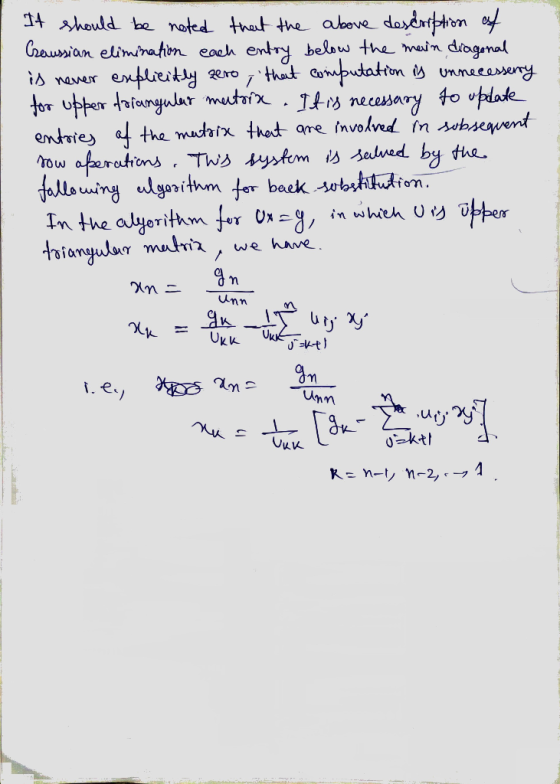
(a) Suppose we want to solve the linear vector-matrix equation Ax b for the vector x. Show that the Gauss elimination algorithm may be written bAbm,B where m 1, This process produces a matrix equa...
a. Every matrix equation Ax b corresponds to a vector equation with the same solution set....
 a. Every matrix equation Ax b corresponds to a vector equation with the same solution set. Choose the correct answer below. O A. False. The matrix equation Ax-b does not correspond to a vector equation with the same solution set. O B. False. The matrix equation Ax b only corresponds to an inconsistent system of vector equations. O c. True. The matrix equation Ax-bis simply another notation for the vector equation x1a1 + x2a2 +·.. + xnan-b, where al ,...
a. Every matrix equation Ax b corresponds to a vector equation with the same solution set. Choose the correct answer below. O A. False. The matrix equation Ax-b does not correspond to a vector equation with the same solution set. O B. False. The matrix equation Ax b only corresponds to an inconsistent system of vector equations. O c. True. The matrix equation Ax-bis simply another notation for the vector equation x1a1 + x2a2 +·.. + xnan-b, where al ,...
Problem 8 Suppose that the matrix equation Ax = b represents a consistent system of m...
 Problem 8 Suppose that the matrix equation Ax = b represents a consistent system of m equations in n unknowns and Xo is a specific solution of this system. Show that any solution of this system E can be written in the form x = xo + x1, where x1 is a solution of Ax = 0.
Problem 8 Suppose that the matrix equation Ax = b represents a consistent system of m equations in n unknowns and Xo is a specific solution of this system. Show that any solution of this system E can be written in the form x = xo + x1, where x1 is a solution of Ax = 0.
1. (20 points total) We will solve the following system of linear equations and express the...
 1. (20 points total) We will solve the following system of linear equations and express the problem and solution in various forms. 2x1 + 4x2 + x4 – 25 = 1 2.22 - 3.23 – 24 +2.25 = 1. (a) (2 point) How many free parameters are required to describe the solution set? (b) (5 points) Write the problem in the form of an augmented matrix and use Gauss-Jordan elimination to find the reduced echelon form of the matrix. (c)...
1. (20 points total) We will solve the following system of linear equations and express the problem and solution in various forms. 2x1 + 4x2 + x4 – 25 = 1 2.22 - 3.23 – 24 +2.25 = 1. (a) (2 point) How many free parameters are required to describe the solution set? (b) (5 points) Write the problem in the form of an augmented matrix and use Gauss-Jordan elimination to find the reduced echelon form of the matrix. (c)...
A.) if A is an m*n matrix, such that Ax=0 for every vector x in R^n, then A is the m * n Zero mat...
a.) if A is an m*n matrix, such that Ax=0 for every vector x in R^n, then A is the m * n Zero matrix b.) The row echelon form of an invertible 3 * 3 matrix is invertible c.) If A is an m*n matrix and the equation Ax=0 has only the trivial solution, then the columns of A are linearly independent. d.) If T is the linear transformation whose standard matrix is an m*n matrix A and the...
4. Consider solving the linear system Ax = b, where A is an rn x n matrix with m < n (under- determined case), b...
 4. Consider solving the linear system Ax = b, where A is an rn x n matrix with m < n (under- determined case), by minimizing lle subject to Ar-b. (a) Show that if A Rmxn is full (row) rank, where m n, then AA is invertible. Then show that r.-A7(AAT)-ibis a solution to Ax = b. (b) Along with part (a) and the solution aAT(AA)-b, show that l thus, z is the optimal solution to the minimization problem. and...
4. Consider solving the linear system Ax = b, where A is an rn x n matrix with m < n (under- determined case), by minimizing lle subject to Ar-b. (a) Show that if A Rmxn is full (row) rank, where m n, then AA is invertible. Then show that r.-A7(AAT)-ibis a solution to Ax = b. (b) Along with part (a) and the solution aAT(AA)-b, show that l thus, z is the optimal solution to the minimization problem. and...
Iry to hhel ieal 4 Suppose that the 3 x 2 matrix A has rank 2 and we want to solve Ax b. a) (10 pts) If there ex...
 Iry to hhel ieal 4 Suppose that the 3 x 2 matrix A has rank 2 and we want to solve Ax b. a) (10 pts) If there exists a solution x ()l show that 0 0 b) (5 pts) Is the 3 x 3 augmented matrix (Alb) invertible? Why or why not? c) (10 pts) Suppose that you found the solution below 2 (A | b) 30 0 Can you compute the solution to Ax = b? If yes...
Iry to hhel ieal 4 Suppose that the 3 x 2 matrix A has rank 2 and we want to solve Ax b. a) (10 pts) If there exists a solution x ()l show that 0 0 b) (5 pts) Is the 3 x 3 augmented matrix (Alb) invertible? Why or why not? c) (10 pts) Suppose that you found the solution below 2 (A | b) 30 0 Can you compute the solution to Ax = b? If yes...
just 1,2,4 Problem 1 Consider the linear system of equations Ax = b, where x €...
 just 1,2,4
Problem 1 Consider the linear system of equations Ax = b, where x € R4X1, and A= 120 b = and h= 0.1. [2+d -1 0 0 1 1 -1 2+d -1 0 h2 0 -1 2 + 1 Lo 0 -1 2+d] 1. Is the above matrix diagonally dominant? Why 2. Use hand calculations to solve the linear system Ax = b with d=1 with the following methods: (a) Gaussian elimination. (b) LU decomposition. Use MATLAB (L,...
just 1,2,4
Problem 1 Consider the linear system of equations Ax = b, where x € R4X1, and A= 120 b = and h= 0.1. [2+d -1 0 0 1 1 -1 2+d -1 0 h2 0 -1 2 + 1 Lo 0 -1 2+d] 1. Is the above matrix diagonally dominant? Why 2. Use hand calculations to solve the linear system Ax = b with d=1 with the following methods: (a) Gaussian elimination. (b) LU decomposition. Use MATLAB (L,...
HERE IS THE CODE I FIXED BUT STILL DOESN'T WORK NOTE: THE VARIABLE x = zeros(size(b))...
 HERE IS THE CODE I FIXED BUT STILL DOESN'T
WORK
NOTE: THE VARIABLE x = zeros(size(b)) CAN'T BE CHANGED CAUSE HAS
BEEN SET BY ASSESSOR
HI EXPERTS I NEED HELP TO SOLVE THIS HOMEWORK PROBLEM FOR MATLAB
CODE
A COUPLE OF TIMES I TRIED LAST TIME TO ASK BUT ALL OF THE
ANSWERS WERE WRONG
PLEASE KINDLY HELP ME FIND THE RIGHT SOLUTION, ANY HELP WILL BE
VERY APPRECIATE
Engineering Computations and Modelling > Week 6 Homework > Backward Substitution...
HERE IS THE CODE I FIXED BUT STILL DOESN'T
WORK
NOTE: THE VARIABLE x = zeros(size(b)) CAN'T BE CHANGED CAUSE HAS
BEEN SET BY ASSESSOR
HI EXPERTS I NEED HELP TO SOLVE THIS HOMEWORK PROBLEM FOR MATLAB
CODE
A COUPLE OF TIMES I TRIED LAST TIME TO ASK BUT ALL OF THE
ANSWERS WERE WRONG
PLEASE KINDLY HELP ME FIND THE RIGHT SOLUTION, ANY HELP WILL BE
VERY APPRECIATE
Engineering Computations and Modelling > Week 6 Homework > Backward Substitution...
Let A e Rmxn. The linear system Ax = b can have either: (i) a unique...
 Let A e Rmxn. The linear system Ax = b can have either: (i) a unique solution, (ii) no solution, or (iii) infinitely many solutions. If A is square and invertible, there is a unique solution, which can be written as x = A-'b. The concept of pseudoinverse seeks to generalise this idea to non-square matrices and to cases (ii) and (iii). Taking case (ii) of an inconsistent linear system, we may solve the normal equations AT Ar = Ab...
Let A e Rmxn. The linear system Ax = b can have either: (i) a unique solution, (ii) no solution, or (iii) infinitely many solutions. If A is square and invertible, there is a unique solution, which can be written as x = A-'b. The concept of pseudoinverse seeks to generalise this idea to non-square matrices and to cases (ii) and (iii). Taking case (ii) of an inconsistent linear system, we may solve the normal equations AT Ar = Ab...
12.3 Least angle property of least squares. Suppose the m × n matrix A has linearly independent columns, and b is an m-vector. Let x ATb denote the least squares approximate solution (a) Show that fo...
 12.3 Least angle property of least squares. Suppose the m × n matrix A has linearly independent columns, and b is an m-vector. Let x ATb denote the least squares approximate solution (a) Show that for any n-vector a, (Ax)Tb - (Aa)"(Aâ), i.e., the inner product of Ax and b is the same as the inner product of Ax and Ai. Hint. Use (Ax)b (ATb) and (ATA)2 = ATb (b) Show that when A and b are both nonzero, we...
12.3 Least angle property of least squares. Suppose the m × n matrix A has linearly independent columns, and b is an m-vector. Let x ATb denote the least squares approximate solution (a) Show that for any n-vector a, (Ax)Tb - (Aa)"(Aâ), i.e., the inner product of Ax and b is the same as the inner product of Ax and Ai. Hint. Use (Ax)b (ATb) and (ATA)2 = ATb (b) Show that when A and b are both nonzero, we...
 a. Every matrix equation Ax b corresponds to a vector equation with the same solution set. Choose the correct answer below. O A. False. The matrix equation Ax-b does not correspond to a vector equation with the same solution set. O B. False. The matrix equation Ax b only corresponds to an inconsistent system of vector equations. O c. True. The matrix equation Ax-bis simply another notation for the vector equation x1a1 + x2a2 +·.. + xnan-b, where al ,...
a. Every matrix equation Ax b corresponds to a vector equation with the same solution set. Choose the correct answer below. O A. False. The matrix equation Ax-b does not correspond to a vector equation with the same solution set. O B. False. The matrix equation Ax b only corresponds to an inconsistent system of vector equations. O c. True. The matrix equation Ax-bis simply another notation for the vector equation x1a1 + x2a2 +·.. + xnan-b, where al ,...
 Problem 8 Suppose that the matrix equation Ax = b represents a consistent system of m equations in n unknowns and Xo is a specific solution of this system. Show that any solution of this system E can be written in the form x = xo + x1, where x1 is a solution of Ax = 0.
Problem 8 Suppose that the matrix equation Ax = b represents a consistent system of m equations in n unknowns and Xo is a specific solution of this system. Show that any solution of this system E can be written in the form x = xo + x1, where x1 is a solution of Ax = 0.
 1. (20 points total) We will solve the following system of linear equations and express the problem and solution in various forms. 2x1 + 4x2 + x4 – 25 = 1 2.22 - 3.23 – 24 +2.25 = 1. (a) (2 point) How many free parameters are required to describe the solution set? (b) (5 points) Write the problem in the form of an augmented matrix and use Gauss-Jordan elimination to find the reduced echelon form of the matrix. (c)...
1. (20 points total) We will solve the following system of linear equations and express the problem and solution in various forms. 2x1 + 4x2 + x4 – 25 = 1 2.22 - 3.23 – 24 +2.25 = 1. (a) (2 point) How many free parameters are required to describe the solution set? (b) (5 points) Write the problem in the form of an augmented matrix and use Gauss-Jordan elimination to find the reduced echelon form of the matrix. (c)...
 4. Consider solving the linear system Ax = b, where A is an rn x n matrix with m < n (under- determined case), by minimizing lle subject to Ar-b. (a) Show that if A Rmxn is full (row) rank, where m n, then AA is invertible. Then show that r.-A7(AAT)-ibis a solution to Ax = b. (b) Along with part (a) and the solution aAT(AA)-b, show that l thus, z is the optimal solution to the minimization problem. and...
4. Consider solving the linear system Ax = b, where A is an rn x n matrix with m < n (under- determined case), by minimizing lle subject to Ar-b. (a) Show that if A Rmxn is full (row) rank, where m n, then AA is invertible. Then show that r.-A7(AAT)-ibis a solution to Ax = b. (b) Along with part (a) and the solution aAT(AA)-b, show that l thus, z is the optimal solution to the minimization problem. and...
 Iry to hhel ieal 4 Suppose that the 3 x 2 matrix A has rank 2 and we want to solve Ax b. a) (10 pts) If there exists a solution x ()l show that 0 0 b) (5 pts) Is the 3 x 3 augmented matrix (Alb) invertible? Why or why not? c) (10 pts) Suppose that you found the solution below 2 (A | b) 30 0 Can you compute the solution to Ax = b? If yes...
Iry to hhel ieal 4 Suppose that the 3 x 2 matrix A has rank 2 and we want to solve Ax b. a) (10 pts) If there exists a solution x ()l show that 0 0 b) (5 pts) Is the 3 x 3 augmented matrix (Alb) invertible? Why or why not? c) (10 pts) Suppose that you found the solution below 2 (A | b) 30 0 Can you compute the solution to Ax = b? If yes...
 just 1,2,4
Problem 1 Consider the linear system of equations Ax = b, where x € R4X1, and A= 120 b = and h= 0.1. [2+d -1 0 0 1 1 -1 2+d -1 0 h2 0 -1 2 + 1 Lo 0 -1 2+d] 1. Is the above matrix diagonally dominant? Why 2. Use hand calculations to solve the linear system Ax = b with d=1 with the following methods: (a) Gaussian elimination. (b) LU decomposition. Use MATLAB (L,...
just 1,2,4
Problem 1 Consider the linear system of equations Ax = b, where x € R4X1, and A= 120 b = and h= 0.1. [2+d -1 0 0 1 1 -1 2+d -1 0 h2 0 -1 2 + 1 Lo 0 -1 2+d] 1. Is the above matrix diagonally dominant? Why 2. Use hand calculations to solve the linear system Ax = b with d=1 with the following methods: (a) Gaussian elimination. (b) LU decomposition. Use MATLAB (L,...
 HERE IS THE CODE I FIXED BUT STILL DOESN'T
WORK
NOTE: THE VARIABLE x = zeros(size(b)) CAN'T BE CHANGED CAUSE HAS
BEEN SET BY ASSESSOR
HI EXPERTS I NEED HELP TO SOLVE THIS HOMEWORK PROBLEM FOR MATLAB
CODE
A COUPLE OF TIMES I TRIED LAST TIME TO ASK BUT ALL OF THE
ANSWERS WERE WRONG
PLEASE KINDLY HELP ME FIND THE RIGHT SOLUTION, ANY HELP WILL BE
VERY APPRECIATE
Engineering Computations and Modelling > Week 6 Homework > Backward Substitution...
HERE IS THE CODE I FIXED BUT STILL DOESN'T
WORK
NOTE: THE VARIABLE x = zeros(size(b)) CAN'T BE CHANGED CAUSE HAS
BEEN SET BY ASSESSOR
HI EXPERTS I NEED HELP TO SOLVE THIS HOMEWORK PROBLEM FOR MATLAB
CODE
A COUPLE OF TIMES I TRIED LAST TIME TO ASK BUT ALL OF THE
ANSWERS WERE WRONG
PLEASE KINDLY HELP ME FIND THE RIGHT SOLUTION, ANY HELP WILL BE
VERY APPRECIATE
Engineering Computations and Modelling > Week 6 Homework > Backward Substitution...
 Let A e Rmxn. The linear system Ax = b can have either: (i) a unique solution, (ii) no solution, or (iii) infinitely many solutions. If A is square and invertible, there is a unique solution, which can be written as x = A-'b. The concept of pseudoinverse seeks to generalise this idea to non-square matrices and to cases (ii) and (iii). Taking case (ii) of an inconsistent linear system, we may solve the normal equations AT Ar = Ab...
Let A e Rmxn. The linear system Ax = b can have either: (i) a unique solution, (ii) no solution, or (iii) infinitely many solutions. If A is square and invertible, there is a unique solution, which can be written as x = A-'b. The concept of pseudoinverse seeks to generalise this idea to non-square matrices and to cases (ii) and (iii). Taking case (ii) of an inconsistent linear system, we may solve the normal equations AT Ar = Ab...
 12.3 Least angle property of least squares. Suppose the m × n matrix A has linearly independent columns, and b is an m-vector. Let x ATb denote the least squares approximate solution (a) Show that for any n-vector a, (Ax)Tb - (Aa)"(Aâ), i.e., the inner product of Ax and b is the same as the inner product of Ax and Ai. Hint. Use (Ax)b (ATb) and (ATA)2 = ATb (b) Show that when A and b are both nonzero, we...
12.3 Least angle property of least squares. Suppose the m × n matrix A has linearly independent columns, and b is an m-vector. Let x ATb denote the least squares approximate solution (a) Show that for any n-vector a, (Ax)Tb - (Aa)"(Aâ), i.e., the inner product of Ax and b is the same as the inner product of Ax and Ai. Hint. Use (Ax)b (ATb) and (ATA)2 = ATb (b) Show that when A and b are both nonzero, we...
Most questions answered within 3 hours.
-
1. convert the following number of to minheap using min heap
down.
for (k=n/2;k>0;k--)
minheapdn;
array:...
asked 10 minutes ago -
biochem question
1. Distinguish between β-barrel and α-helical structures used
for membrane transport
asked 12 minutes ago -
1.
Without changing the chemical composition of a material, how can
you change the properties of...
asked 12 minutes ago -
Using 3 digital pins as binary bits, the user should have the
ability to select a...
asked 18 minutes ago -
A cruise ship with a mass of 1.33 ✕ 107 kg strikes a pier at a...
asked 31 minutes ago -
a red ball of mass m and a blue ball of mass 2m have
the same...
asked 34 minutes ago -
Use the systematic treatment of equilbria to determine the pH of
a 50 mM solution of...
asked 35 minutes ago -
C++ Programming: Customer file
Can same one help me out with a example finsih and working...
asked 52 minutes ago -
You look at the hourly salary (in USD/hour) of employees
at 2 different companies in Antwerp....
asked 53 minutes ago -
what are some of the reinforcers do yoh respond to that shapes your
behaviors (negative and...
asked 53 minutes ago -
in
the laboratory, a student measured the pH of a 0.463 M aqueous
solution of diethylamine,...
asked 1 hour ago -
Information about Q-mart's inventory appears in the following
table. When LCM is applied to the whole...
asked 1 hour ago