Given the system represented in state space as follows: dx=[ -1 -7 6; -8 4 8;...
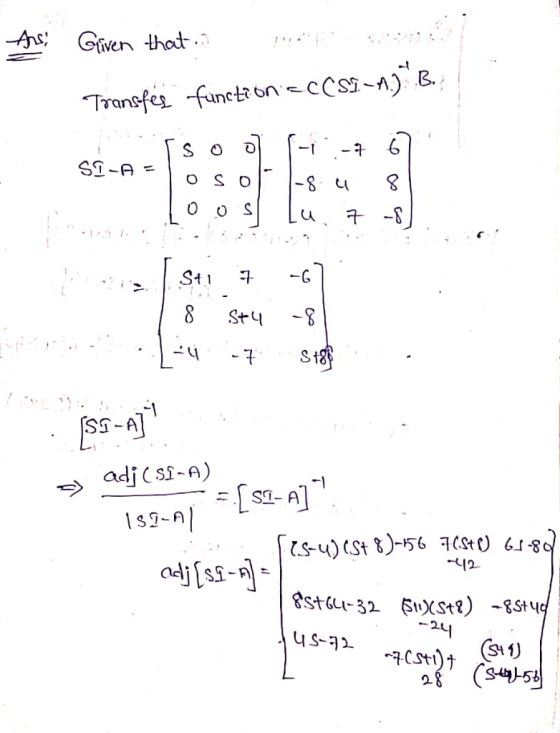
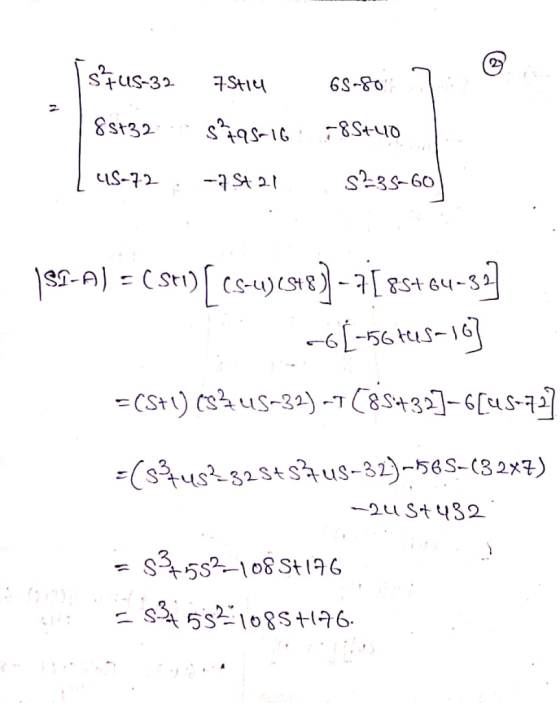
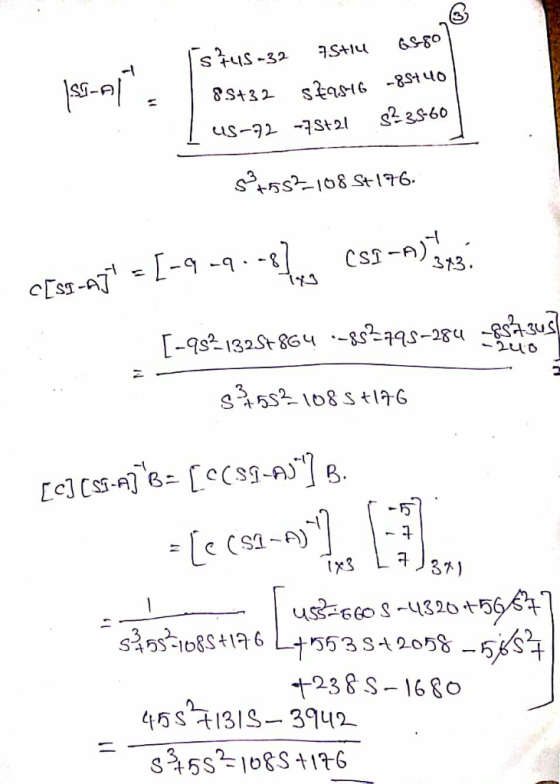
Given the system represented in state space as follows:
dx=[ -1 -7 6; -8 4 8; 4 7 -8]x+[-5 ;-7; 7]
y=[-9 -9 -8 ]*x
convert the system to one where the new state vector , z, is
z=[-4 9 -3; 0 -4 7; -1 -4 -9]*x
find and compare both of system’s eigenvalues
how can we code this problem with MATLAB?
Homework Answers
Add Answer to:
Given the system represented in state space as follows:
dx=[ -1 -7 6; -8 4 8;...
Problem 1 A system is represented in state space as 8 -4 1 -4 5 7...
 Problem 1 A system is represented in state space as 8 -4 1 -4 5 7 -9 0 0 a) Find the transfer function b) Find the poles
Problem 1 A system is represented in state space as 8 -4 1 -4 5 7 -9 0 0 a) Find the transfer function b) Find the poles
3. a) Find a state space representation for a linear system represented by the following differen...
 3. a) Find a state space representation for a linear system represented by the following differential equation, where v(t) denotes the input and y(1) is the output: b) Consider a linear system represented by the following differential equation, where x() denotes the input and y(t) is the output: )+4()+4y()x(t) i) Write down its transfer function and frequency response function i) What is the form of the steady state response of the above system due to a periodic input that has...
3. a) Find a state space representation for a linear system represented by the following differential equation, where v(t) denotes the input and y(1) is the output: b) Consider a linear system represented by the following differential equation, where x() denotes the input and y(t) is the output: )+4()+4y()x(t) i) Write down its transfer function and frequency response function i) What is the form of the steady state response of the above system due to a periodic input that has...
Problem 4: (65 points) Let a system be given by the state space representation 8 8...
 Problem 4: (65 points) Let a system be given by the state space representation 8 8 10 * = X+ u(t), y = [1 -1]x – u(t) 1 1 -1 0 Y(S) d) (7) Find the transfer function US) e) (5) Is the system BIBO stable? 3 f) (9) Let the initial state x(0) -3 u(t) = 0) for all t > 0. = Find the zero input response (i.e., with the input
Problem 4: (65 points) Let a system be given by the state space representation 8 8 10 * = X+ u(t), y = [1 -1]x – u(t) 1 1 -1 0 Y(S) d) (7) Find the transfer function US) e) (5) Is the system BIBO stable? 3 f) (9) Let the initial state x(0) -3 u(t) = 0) for all t > 0. = Find the zero input response (i.e., with the input
Q3. The state-space representation of a dynamical system is given as follows: (2) (y = 2...
 Q3. The state-space representation of a dynamical system is given as follows: (2) (y = 2 x 1. By finding the eigenvalues, eigenvectors of the A matrix, compute el via the diagonal transformation. 2. Assume that the control input is u(t) = 0, compute x(1) and y(t). 3. Assume that the input is u(t) = 1 + 2e-21, compute x(t) and y(t). 4. Given your answers to the previous question, compute x(t) when 1 00
Q3. The state-space representation of a dynamical system is given as follows: (2) (y = 2 x 1. By finding the eigenvalues, eigenvectors of the A matrix, compute el via the diagonal transformation. 2. Assume that the control input is u(t) = 0, compute x(1) and y(t). 3. Assume that the input is u(t) = 1 + 2e-21, compute x(t) and y(t). 4. Given your answers to the previous question, compute x(t) when 1 00
A state space linear system is shown below. Use Matlab to solve the following problems. Requirement...
A state space linear system is shown below. Use Matlab to solve the following problems. Requirement for project report: (1) Results; (2) Matlab code. dx1/dt=-x1(t)+u(t) dx2/dt=x1(t)-2x2(t)-x3(t)+3u(t) dx3/dt=-3x3(t) y(t)=-x1(t)+2x2(t)+x3(t)+u(t) (1) Assume the system has input u(t)=e-3t if t>t0 and zero initial state x(0)=[0;0;0]. Using the transition matrix obtained, compute the system’s output (analytical solution), and plot the output as a function of time (t within 0 to 10). (2) Using the function lsim to simulate the system’s output (analytical solution), and...
3. (25 points) For parts a & b, determine the state space representation and write the matlab cod...
 3. (25 points) For parts a & b, determine the state space representation and write the matlab code to solve the transfer function a. The circuit below where the input is v, and the output is Va 500 mF V, LX 0 b. A system is represented by the differential equation below where the output is y() and the input is z(). 440180 + 5y0) 2) d' y(t) dr d y(t) dt ontpm ria bles 2L
3. (25 points) For...
3. (25 points) For parts a & b, determine the state space representation and write the matlab code to solve the transfer function a. The circuit below where the input is v, and the output is Va 500 mF V, LX 0 b. A system is represented by the differential equation below where the output is y() and the input is z(). 440180 + 5y0) 2) d' y(t) dr d y(t) dt ontpm ria bles 2L
3. (25 points) For...
Please only solve part C Assume the following state space representation of a discrete-time servomotor system. (As a review for the Final Exam, you might check this state space representation with th...
 Please only solve part C
Assume the following state space representation of a discrete-time servomotor system. (As a review for the Final Exam, you might check this state space representation with the difference equation in Problem 1 on Homework 2. This parenthetical comment is not a required part for Homework 8.) 2. 0.048371 u(n) 1.9048x(n) lo.04679 [1,0]x(n) y(n) Compute the open-loop eigenvalues of the system. That is, find the eigenvalues of Ф. Check controllability of the system. Or, answer the...
Please only solve part C
Assume the following state space representation of a discrete-time servomotor system. (As a review for the Final Exam, you might check this state space representation with the difference equation in Problem 1 on Homework 2. This parenthetical comment is not a required part for Homework 8.) 2. 0.048371 u(n) 1.9048x(n) lo.04679 [1,0]x(n) y(n) Compute the open-loop eigenvalues of the system. That is, find the eigenvalues of Ф. Check controllability of the system. Or, answer the...
A system (a plant) is represented as a state-space model in the form: dt (1) Deduce and draw a si...
 A system (a plant) is represented as a state-space model in the form: dt (1) Deduce and draw a simulation diagram for the system. Implement it afterwards in Simulink. For a unit stepin- put, simulate and plot the trajectories in the state space, and the output y(t) of the system, for a set of four different initial conditions: x(0)-[0 ofT,x(0-[1 o, x(0-0 IT,x(0-[0 I]T
A system (a plant) is represented as a state-space model in the form: dt (1) Deduce...
A system (a plant) is represented as a state-space model in the form: dt (1) Deduce and draw a simulation diagram for the system. Implement it afterwards in Simulink. For a unit stepin- put, simulate and plot the trajectories in the state space, and the output y(t) of the system, for a set of four different initial conditions: x(0)-[0 ofT,x(0-[1 o, x(0-0 IT,x(0-[0 I]T
A system (a plant) is represented as a state-space model in the form: dt (1) Deduce...
2- Solve for y(t) for the following system 1 01 -3 represented in state space, where...
 2- Solve for y(t) for the following system 1 01 -3 represented in state space, where u(t) is the unit step. Use the Laplace transform approach to solve the state eqiation. 1 u(t) 0 -6 1|x + 0 -5 [0 1 1 ]x; x(0) = 0 %3D
2- Solve for y(t) for the following system 1 01 -3 represented in state space, where u(t) is the unit step. Use the Laplace transform approach to solve the state eqiation. 1 u(t) 0 -6 1|x + 0 -5 [0 1 1 ]x; x(0) = 0 %3D
set of linear equations are given as follows 10 x +20 y +9z 414 +7 x...
 set of linear equations are given as follows 10 x +20 y +9z 414 +7 x -14y +12z 363 -3x +12 y +11 z-475 If the above system of linear equations is represented by the matrix system where the unknown vector vI-x y z) A- coefficient of the linear systems, and b-right-hand side vector 1) Write the matrix A 2) Using a for-loop, write a Matiab-code to compute matros-matrix product Le., C A'A 3) Select the correct value of C'b...
set of linear equations are given as follows 10 x +20 y +9z 414 +7 x -14y +12z 363 -3x +12 y +11 z-475 If the above system of linear equations is represented by the matrix system where the unknown vector vI-x y z) A- coefficient of the linear systems, and b-right-hand side vector 1) Write the matrix A 2) Using a for-loop, write a Matiab-code to compute matros-matrix product Le., C A'A 3) Select the correct value of C'b...
 Problem 1 A system is represented in state space as 8 -4 1 -4 5 7 -9 0 0 a) Find the transfer function b) Find the poles
Problem 1 A system is represented in state space as 8 -4 1 -4 5 7 -9 0 0 a) Find the transfer function b) Find the poles
 3. a) Find a state space representation for a linear system represented by the following differential equation, where v(t) denotes the input and y(1) is the output: b) Consider a linear system represented by the following differential equation, where x() denotes the input and y(t) is the output: )+4()+4y()x(t) i) Write down its transfer function and frequency response function i) What is the form of the steady state response of the above system due to a periodic input that has...
3. a) Find a state space representation for a linear system represented by the following differential equation, where v(t) denotes the input and y(1) is the output: b) Consider a linear system represented by the following differential equation, where x() denotes the input and y(t) is the output: )+4()+4y()x(t) i) Write down its transfer function and frequency response function i) What is the form of the steady state response of the above system due to a periodic input that has...
 Problem 4: (65 points) Let a system be given by the state space representation 8 8 10 * = X+ u(t), y = [1 -1]x – u(t) 1 1 -1 0 Y(S) d) (7) Find the transfer function US) e) (5) Is the system BIBO stable? 3 f) (9) Let the initial state x(0) -3 u(t) = 0) for all t > 0. = Find the zero input response (i.e., with the input
Problem 4: (65 points) Let a system be given by the state space representation 8 8 10 * = X+ u(t), y = [1 -1]x – u(t) 1 1 -1 0 Y(S) d) (7) Find the transfer function US) e) (5) Is the system BIBO stable? 3 f) (9) Let the initial state x(0) -3 u(t) = 0) for all t > 0. = Find the zero input response (i.e., with the input
 Q3. The state-space representation of a dynamical system is given as follows: (2) (y = 2 x 1. By finding the eigenvalues, eigenvectors of the A matrix, compute el via the diagonal transformation. 2. Assume that the control input is u(t) = 0, compute x(1) and y(t). 3. Assume that the input is u(t) = 1 + 2e-21, compute x(t) and y(t). 4. Given your answers to the previous question, compute x(t) when 1 00
Q3. The state-space representation of a dynamical system is given as follows: (2) (y = 2 x 1. By finding the eigenvalues, eigenvectors of the A matrix, compute el via the diagonal transformation. 2. Assume that the control input is u(t) = 0, compute x(1) and y(t). 3. Assume that the input is u(t) = 1 + 2e-21, compute x(t) and y(t). 4. Given your answers to the previous question, compute x(t) when 1 00
 3. (25 points) For parts a & b, determine the state space representation and write the matlab code to solve the transfer function a. The circuit below where the input is v, and the output is Va 500 mF V, LX 0 b. A system is represented by the differential equation below where the output is y() and the input is z(). 440180 + 5y0) 2) d' y(t) dr d y(t) dt ontpm ria bles 2L
3. (25 points) For...
3. (25 points) For parts a & b, determine the state space representation and write the matlab code to solve the transfer function a. The circuit below where the input is v, and the output is Va 500 mF V, LX 0 b. A system is represented by the differential equation below where the output is y() and the input is z(). 440180 + 5y0) 2) d' y(t) dr d y(t) dt ontpm ria bles 2L
3. (25 points) For...
 Please only solve part C
Assume the following state space representation of a discrete-time servomotor system. (As a review for the Final Exam, you might check this state space representation with the difference equation in Problem 1 on Homework 2. This parenthetical comment is not a required part for Homework 8.) 2. 0.048371 u(n) 1.9048x(n) lo.04679 [1,0]x(n) y(n) Compute the open-loop eigenvalues of the system. That is, find the eigenvalues of Ф. Check controllability of the system. Or, answer the...
Please only solve part C
Assume the following state space representation of a discrete-time servomotor system. (As a review for the Final Exam, you might check this state space representation with the difference equation in Problem 1 on Homework 2. This parenthetical comment is not a required part for Homework 8.) 2. 0.048371 u(n) 1.9048x(n) lo.04679 [1,0]x(n) y(n) Compute the open-loop eigenvalues of the system. That is, find the eigenvalues of Ф. Check controllability of the system. Or, answer the...
 A system (a plant) is represented as a state-space model in the form: dt (1) Deduce and draw a simulation diagram for the system. Implement it afterwards in Simulink. For a unit stepin- put, simulate and plot the trajectories in the state space, and the output y(t) of the system, for a set of four different initial conditions: x(0)-[0 ofT,x(0-[1 o, x(0-0 IT,x(0-[0 I]T
A system (a plant) is represented as a state-space model in the form: dt (1) Deduce...
A system (a plant) is represented as a state-space model in the form: dt (1) Deduce and draw a simulation diagram for the system. Implement it afterwards in Simulink. For a unit stepin- put, simulate and plot the trajectories in the state space, and the output y(t) of the system, for a set of four different initial conditions: x(0)-[0 ofT,x(0-[1 o, x(0-0 IT,x(0-[0 I]T
A system (a plant) is represented as a state-space model in the form: dt (1) Deduce...
 2- Solve for y(t) for the following system 1 01 -3 represented in state space, where u(t) is the unit step. Use the Laplace transform approach to solve the state eqiation. 1 u(t) 0 -6 1|x + 0 -5 [0 1 1 ]x; x(0) = 0 %3D
2- Solve for y(t) for the following system 1 01 -3 represented in state space, where u(t) is the unit step. Use the Laplace transform approach to solve the state eqiation. 1 u(t) 0 -6 1|x + 0 -5 [0 1 1 ]x; x(0) = 0 %3D
 set of linear equations are given as follows 10 x +20 y +9z 414 +7 x -14y +12z 363 -3x +12 y +11 z-475 If the above system of linear equations is represented by the matrix system where the unknown vector vI-x y z) A- coefficient of the linear systems, and b-right-hand side vector 1) Write the matrix A 2) Using a for-loop, write a Matiab-code to compute matros-matrix product Le., C A'A 3) Select the correct value of C'b...
set of linear equations are given as follows 10 x +20 y +9z 414 +7 x -14y +12z 363 -3x +12 y +11 z-475 If the above system of linear equations is represented by the matrix system where the unknown vector vI-x y z) A- coefficient of the linear systems, and b-right-hand side vector 1) Write the matrix A 2) Using a for-loop, write a Matiab-code to compute matros-matrix product Le., C A'A 3) Select the correct value of C'b...
Most questions answered within 3 hours.
-
I need to write a research paper and work cited about this
topic: The United States...
asked 5 minutes ago -
Hello! I was wondering if I could have some help?
If the vapor pressure of carvone...
asked 27 minutes ago -
An economist wants to estimate the mean per capita income (in
thousands of dollars) for a...
asked 46 minutes ago -
What would be the input/output characteristic of a circuit
obtained by putting two of your 2's-complementers...
asked 45 minutes ago -
In Drosophila, the transition from the syncytial blastoderm
stage to the cellular blastoderm stage is a...
asked 1 hour ago -
Project management question:
Name 3 different types of resources (hint: humans are one
type)
asked 1 hour ago -
Consider the following reaction: C 2H 2( g) + 2H 2( g) C 2H 6(
g)...
asked 1 hour ago -
Consider a 1.0 L buffer containing 0.092 mol L-1 HCOOH and 0.100
mol L-1 HCOO-. What...
asked 1 hour ago -
Koch Realty has owned a vacant land with a FMV of
$775,000 and an adjusted basis...
asked 1 hour ago -
It is estimated 29% of all adults in United States invest in
stocks and that 85%...
asked 1 hour ago -
What does a 2-sided p value of 0.04 mean? (I am not asking if it
is...
asked 2 hours ago -
A parallel-plate capacitor is made from two aluminum-foil
sheets, each 7.8 cmcm wide and 5.1 mmlong....
asked 2 hours ago