Please code on MATLAB and explain D) only. Thank you
Homework Answers


![ess = lim (S²-1) 530 53 5+ k[s+(x+3)S +3«] ess w) Cow 12 (K) (34) 32 ess = -1 3kX Characteristic equation of System is nio m](http://img.homeworklib.com/questions/bf712790-0097-11eb-ba66-c79b3112783a.png?x-oss-process=image/resize,w_560)

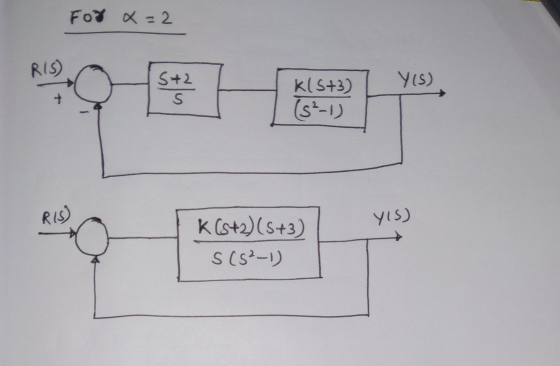
b.) Matlab code to plot root locus for alpha =2
clc;
clear all;
close all;
G=tf([1 5 6],[1 0 -1 0])
rlocus(G)
OUTPUT

C.) Matlab code to plot bode plot for alpha=2 and k=2
clc;
clear all;
close all;
G=tf([2 10 12],[1 0 -1 0])
bode(G)
[Gm,Pm]=margin(G)
OUTPUT


D.) Matlab Code for nyquist plot for alpha =2 and k=2
clc;
clear all;
close all;
G=tf([2 10 12],[1 0 -1 0])
nyquist(G)
OUTPUT

System has no open loop zeroes in right half of s plane.Also nyquist plot do not encircle the (-1,0) point .So system has no closed loop poles in right half of s plane.System is stable
e.) Matlab code to plot output for step input for alpha=2 and k=2
clc;
clear all;
close all;
G=tf([2 10 12],[1 0 -1 0])
T=feedback(G,1) %closed loop transfer function having unity
negative feedback
step(T)
OUTPUT

System is oscillatory but if we increase the value of K then system will less oscillate.

![YIS) = [X (5+3)/65-] *5184) NIS) S(S-1) + K (5 +3)(5+2) » YIS) 11 NIS) K (5+3)s. 53-5+k(52+55+6) Y(S) k (52+3) ) N(S) 53-5+k1](http://img.homeworklib.com/questions/c92e08f0-0097-11eb-bc76-15e1578ff32e.png?x-oss-process=image/resize,w_560)
Matlab Code
clc;
clear all;
close all;
G=tf([2 6 0],[1 2 9 12])
OUTPUT

Add Answer to:
Please code on MATLAB and explain D) only. Thank you
The block diagram of a linear...
For the unity feedback system in the below figure, 1. EGO) R(s)) C(s) G(s)K (s 1) (s + 4) a) Sket...
 For the unity feedback system in the below figure, 1. EGO) R(s)) C(s) G(s)K (s 1) (s + 4) a) Sketch the bode plot with Matlab command bode0 b) Plot the nyquist diagram using Matlab command nyquist(0, find the system stability c) Find phase margin, gain margin, and crossover frequencies using Matlab command margin(0 and find the system stability
For the unity feedback system in the below figure, 1. EGO) R(s)) C(s) G(s)K (s 1) (s + 4) a) Sketch...
For the unity feedback system in the below figure, 1. EGO) R(s)) C(s) G(s)K (s 1) (s + 4) a) Sketch the bode plot with Matlab command bode0 b) Plot the nyquist diagram using Matlab command nyquist(0, find the system stability c) Find phase margin, gain margin, and crossover frequencies using Matlab command margin(0 and find the system stability
For the unity feedback system in the below figure, 1. EGO) R(s)) C(s) G(s)K (s 1) (s + 4) a) Sketch...
pleas show all work thank you Disturbance D(s) Reference Control Output Input Error Input t US) Y(s) Plant Given the above closed loop block diagram: Let aundl s) KK (a) Show that the above system wil...
 pleas show all work thank you
Disturbance D(s) Reference Control Output Input Error Input t US) Y(s) Plant Given the above closed loop block diagram: Let aundl s) KK (a) Show that the above system will have zero steady state error for step reference input (when D(s)-0) as well as for step disturbance input (when R(s)-0). (b) LetJ B K1 and Kp0, what about the stability of the closed loop system?
Disturbance D(s) Reference Control Output Input Error Input t...
pleas show all work thank you
Disturbance D(s) Reference Control Output Input Error Input t US) Y(s) Plant Given the above closed loop block diagram: Let aundl s) KK (a) Show that the above system will have zero steady state error for step reference input (when D(s)-0) as well as for step disturbance input (when R(s)-0). (b) LetJ B K1 and Kp0, what about the stability of the closed loop system?
Disturbance D(s) Reference Control Output Input Error Input t...
PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MAT...
 PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!!
PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE
SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE
IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN
MATLAB !!!!!!
PROBLEM 3 The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t)-Ct, smaller than 0.01C. Here, C is a constant. The overshoot...
PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!!
PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE
SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE
IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN
MATLAB !!!!!!
PROBLEM 3 The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t)-Ct, smaller than 0.01C. Here, C is a constant. The overshoot...
I got A,B,C done can you do D,E,F Also can you check my solutions please. Thank...
 I got A,B,C done can you do D,E,F
Also can you check my solutions please. Thank you ?
Question 1 - Consider an unit feedback system whose open-loop transfer function is G(s)-k/ ((s + 1)(s 2 +4s 25)) A. Draw Bode plot of the open-loop system for k-75 B. Calculate the phase and magnitude of G(s) at 1 rad/s for k 75 C. Determine the cross-over frequency, and the phase and gain margins for k-75 (14 marks D. What is...
I got A,B,C done can you do D,E,F
Also can you check my solutions please. Thank you ?
Question 1 - Consider an unit feedback system whose open-loop transfer function is G(s)-k/ ((s + 1)(s 2 +4s 25)) A. Draw Bode plot of the open-loop system for k-75 B. Calculate the phase and magnitude of G(s) at 1 rad/s for k 75 C. Determine the cross-over frequency, and the phase and gain margins for k-75 (14 marks D. What is...
solving using MATLAB When b=4 R X *-9 40) 101G+ ba? exo tima G (S) 1...
 solving using MATLAB When b=4
R X *-9 40) 101G+ ba? exo tima G (S) 1 (s + 1)(s + 2)(s +b) + b=5 Where “b” in the forward transfer function is equal to the first non-zero digit of your ID Example: ID: 123456 b=6 ID: 123450 R and D are both unit-step input 1. Design a PI controller so that the system behaves with the fastest response with no overshoot a. Give the parameters of the controllers b. Provide...
solving using MATLAB When b=4
R X *-9 40) 101G+ ba? exo tima G (S) 1 (s + 1)(s + 2)(s +b) + b=5 Where “b” in the forward transfer function is equal to the first non-zero digit of your ID Example: ID: 123456 b=6 ID: 123450 R and D are both unit-step input 1. Design a PI controller so that the system behaves with the fastest response with no overshoot a. Give the parameters of the controllers b. Provide...
2. A feedback control system is subject to disturbances at the actuator input, as shown in the following block diagram. Remember that you need to use the final value theorem (and not the table) when...
 2. A feedback control system is subject to disturbances at the actuator input, as shown in the following block diagram. Remember that you need to use the final value theorem (and not the table) when dealing with any other input other than the reference. See the last 3 pages, 12-15, of my steady-state error lecture notes for examples on how to deal with disturbance rather than reference inputs D(s) 1 Y(s) $3+2s2+2s If the reference command is r(t) 1S 0,...
2. A feedback control system is subject to disturbances at the actuator input, as shown in the following block diagram. Remember that you need to use the final value theorem (and not the table) when dealing with any other input other than the reference. See the last 3 pages, 12-15, of my steady-state error lecture notes for examples on how to deal with disturbance rather than reference inputs D(s) 1 Y(s) $3+2s2+2s If the reference command is r(t) 1S 0,...
Consider the following closed-loop system, in which the plant model is P(s) = elave R()2-CO POTY()...
 Consider the following closed-loop system, in which the plant model is P(s) = elave R()2-CO POTY() a) Assume C(s) = K. Determine the range of K for which the closed-loop system is stable via: (1.) the routh-hurwitz stability criteria, (ii.) the margin() command in Matlab, and (lii.) the rlocus command in Matlab. b) Assume a proportional controller of C(s) = K = 40, and a time delay T, located between the controller and plant. Determine the maximum T, value that...
Consider the following closed-loop system, in which the plant model is P(s) = elave R()2-CO POTY() a) Assume C(s) = K. Determine the range of K for which the closed-loop system is stable via: (1.) the routh-hurwitz stability criteria, (ii.) the margin() command in Matlab, and (lii.) the rlocus command in Matlab. b) Assume a proportional controller of C(s) = K = 40, and a time delay T, located between the controller and plant. Determine the maximum T, value that...
Write as MATLAB code with comments thank you. The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t) Ct, smaller than 0...
 Write as MATLAB code with comments thank you.
The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t) Ct, smaller than 0.01C. Here, C is a constant. The overshoot for step input must be such that P.0.S 5% and the settling time with a 2% error should be T. 2 seconds. (a) Based on rlocus function, write a piece of MATLAB code which establishes the controller. (b)...
Write as MATLAB code with comments thank you.
The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t) Ct, smaller than 0.01C. Here, C is a constant. The overshoot for step input must be such that P.0.S 5% and the settling time with a 2% error should be T. 2 seconds. (a) Based on rlocus function, write a piece of MATLAB code which establishes the controller. (b)...
Matlab Simulink please list all the steps Extra Credit: Simulink Disturbance Analysis D(s) Controller Plant Gp(s)...
 Matlab Simulink
please list all the steps
Extra Credit: Simulink Disturbance Analysis D(s) Controller Plant Gp(s) Ge REs 92.9s213.63s 1 97.6s (0.1s + 1) 127 s(s +1)(s +2)(s 5) (s 10) Ge(s) Gp (s) The controller for the system above was designed to accurately track a variety of input signals for the given plant/process. Verify that the feedback system is well suited to this task by creating a model in Simulink and performing the following: 1. Create a model to:...
Matlab Simulink
please list all the steps
Extra Credit: Simulink Disturbance Analysis D(s) Controller Plant Gp(s) Ge REs 92.9s213.63s 1 97.6s (0.1s + 1) 127 s(s +1)(s +2)(s 5) (s 10) Ge(s) Gp (s) The controller for the system above was designed to accurately track a variety of input signals for the given plant/process. Verify that the feedback system is well suited to this task by creating a model in Simulink and performing the following: 1. Create a model to:...
Please solve both parts a and b step-by-step using the block reduction method ONLY. Q4 a)...
 Please solve both parts a and b step-by-step using the block
reduction method ONLY.
Q4 a) (1 mark) The figure below shows a block diagram of a control system, obtain the transfer function [Y(s)/R(s)]N=0 N(S) R(5) Y(s) Gy(s) Ge(s) H(s) b) (2 marks) The figure below shows a closed-loop system with a reference input and disturbance input. Obtain transfer functions C(s)/R(s) and C(s)/D(S) of the system shown. Use block diagram reduction method only. GF D(S) R(S) Es) U(5) Cs) GC...
Please solve both parts a and b step-by-step using the block
reduction method ONLY.
Q4 a) (1 mark) The figure below shows a block diagram of a control system, obtain the transfer function [Y(s)/R(s)]N=0 N(S) R(5) Y(s) Gy(s) Ge(s) H(s) b) (2 marks) The figure below shows a closed-loop system with a reference input and disturbance input. Obtain transfer functions C(s)/R(s) and C(s)/D(S) of the system shown. Use block diagram reduction method only. GF D(S) R(S) Es) U(5) Cs) GC...
 For the unity feedback system in the below figure, 1. EGO) R(s)) C(s) G(s)K (s 1) (s + 4) a) Sketch the bode plot with Matlab command bode0 b) Plot the nyquist diagram using Matlab command nyquist(0, find the system stability c) Find phase margin, gain margin, and crossover frequencies using Matlab command margin(0 and find the system stability
For the unity feedback system in the below figure, 1. EGO) R(s)) C(s) G(s)K (s 1) (s + 4) a) Sketch...
For the unity feedback system in the below figure, 1. EGO) R(s)) C(s) G(s)K (s 1) (s + 4) a) Sketch the bode plot with Matlab command bode0 b) Plot the nyquist diagram using Matlab command nyquist(0, find the system stability c) Find phase margin, gain margin, and crossover frequencies using Matlab command margin(0 and find the system stability
For the unity feedback system in the below figure, 1. EGO) R(s)) C(s) G(s)K (s 1) (s + 4) a) Sketch...
 pleas show all work thank you
Disturbance D(s) Reference Control Output Input Error Input t US) Y(s) Plant Given the above closed loop block diagram: Let aundl s) KK (a) Show that the above system will have zero steady state error for step reference input (when D(s)-0) as well as for step disturbance input (when R(s)-0). (b) LetJ B K1 and Kp0, what about the stability of the closed loop system?
Disturbance D(s) Reference Control Output Input Error Input t...
pleas show all work thank you
Disturbance D(s) Reference Control Output Input Error Input t US) Y(s) Plant Given the above closed loop block diagram: Let aundl s) KK (a) Show that the above system will have zero steady state error for step reference input (when D(s)-0) as well as for step disturbance input (when R(s)-0). (b) LetJ B K1 and Kp0, what about the stability of the closed loop system?
Disturbance D(s) Reference Control Output Input Error Input t...
 PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!!
PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE
SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE
IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN
MATLAB !!!!!!
PROBLEM 3 The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t)-Ct, smaller than 0.01C. Here, C is a constant. The overshoot...
PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!!
PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE
SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE
IN MATLAB !!!!!! PLEASE SOLVE IN MATLAB !!!!!! PLEASE SOLVE IN
MATLAB !!!!!!
PROBLEM 3 The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t)-Ct, smaller than 0.01C. Here, C is a constant. The overshoot...
 I got A,B,C done can you do D,E,F
Also can you check my solutions please. Thank you ?
Question 1 - Consider an unit feedback system whose open-loop transfer function is G(s)-k/ ((s + 1)(s 2 +4s 25)) A. Draw Bode plot of the open-loop system for k-75 B. Calculate the phase and magnitude of G(s) at 1 rad/s for k 75 C. Determine the cross-over frequency, and the phase and gain margins for k-75 (14 marks D. What is...
I got A,B,C done can you do D,E,F
Also can you check my solutions please. Thank you ?
Question 1 - Consider an unit feedback system whose open-loop transfer function is G(s)-k/ ((s + 1)(s 2 +4s 25)) A. Draw Bode plot of the open-loop system for k-75 B. Calculate the phase and magnitude of G(s) at 1 rad/s for k 75 C. Determine the cross-over frequency, and the phase and gain margins for k-75 (14 marks D. What is...
 solving using MATLAB When b=4
R X *-9 40) 101G+ ba? exo tima G (S) 1 (s + 1)(s + 2)(s +b) + b=5 Where “b” in the forward transfer function is equal to the first non-zero digit of your ID Example: ID: 123456 b=6 ID: 123450 R and D are both unit-step input 1. Design a PI controller so that the system behaves with the fastest response with no overshoot a. Give the parameters of the controllers b. Provide...
solving using MATLAB When b=4
R X *-9 40) 101G+ ba? exo tima G (S) 1 (s + 1)(s + 2)(s +b) + b=5 Where “b” in the forward transfer function is equal to the first non-zero digit of your ID Example: ID: 123456 b=6 ID: 123450 R and D are both unit-step input 1. Design a PI controller so that the system behaves with the fastest response with no overshoot a. Give the parameters of the controllers b. Provide...
 2. A feedback control system is subject to disturbances at the actuator input, as shown in the following block diagram. Remember that you need to use the final value theorem (and not the table) when dealing with any other input other than the reference. See the last 3 pages, 12-15, of my steady-state error lecture notes for examples on how to deal with disturbance rather than reference inputs D(s) 1 Y(s) $3+2s2+2s If the reference command is r(t) 1S 0,...
2. A feedback control system is subject to disturbances at the actuator input, as shown in the following block diagram. Remember that you need to use the final value theorem (and not the table) when dealing with any other input other than the reference. See the last 3 pages, 12-15, of my steady-state error lecture notes for examples on how to deal with disturbance rather than reference inputs D(s) 1 Y(s) $3+2s2+2s If the reference command is r(t) 1S 0,...
 Consider the following closed-loop system, in which the plant model is P(s) = elave R()2-CO POTY() a) Assume C(s) = K. Determine the range of K for which the closed-loop system is stable via: (1.) the routh-hurwitz stability criteria, (ii.) the margin() command in Matlab, and (lii.) the rlocus command in Matlab. b) Assume a proportional controller of C(s) = K = 40, and a time delay T, located between the controller and plant. Determine the maximum T, value that...
Consider the following closed-loop system, in which the plant model is P(s) = elave R()2-CO POTY() a) Assume C(s) = K. Determine the range of K for which the closed-loop system is stable via: (1.) the routh-hurwitz stability criteria, (ii.) the margin() command in Matlab, and (lii.) the rlocus command in Matlab. b) Assume a proportional controller of C(s) = K = 40, and a time delay T, located between the controller and plant. Determine the maximum T, value that...
 Write as MATLAB code with comments thank you.
The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t) Ct, smaller than 0.01C. Here, C is a constant. The overshoot for step input must be such that P.0.S 5% and the settling time with a 2% error should be T. 2 seconds. (a) Based on rlocus function, write a piece of MATLAB code which establishes the controller. (b)...
Write as MATLAB code with comments thank you.
The system in Figure 3 comprises a motor and a contoller. The performance requirements entail a steady state error for ramp input r(t) Ct, smaller than 0.01C. Here, C is a constant. The overshoot for step input must be such that P.0.S 5% and the settling time with a 2% error should be T. 2 seconds. (a) Based on rlocus function, write a piece of MATLAB code which establishes the controller. (b)...
 Matlab Simulink
please list all the steps
Extra Credit: Simulink Disturbance Analysis D(s) Controller Plant Gp(s) Ge REs 92.9s213.63s 1 97.6s (0.1s + 1) 127 s(s +1)(s +2)(s 5) (s 10) Ge(s) Gp (s) The controller for the system above was designed to accurately track a variety of input signals for the given plant/process. Verify that the feedback system is well suited to this task by creating a model in Simulink and performing the following: 1. Create a model to:...
Matlab Simulink
please list all the steps
Extra Credit: Simulink Disturbance Analysis D(s) Controller Plant Gp(s) Ge REs 92.9s213.63s 1 97.6s (0.1s + 1) 127 s(s +1)(s +2)(s 5) (s 10) Ge(s) Gp (s) The controller for the system above was designed to accurately track a variety of input signals for the given plant/process. Verify that the feedback system is well suited to this task by creating a model in Simulink and performing the following: 1. Create a model to:...
 Please solve both parts a and b step-by-step using the block
reduction method ONLY.
Q4 a) (1 mark) The figure below shows a block diagram of a control system, obtain the transfer function [Y(s)/R(s)]N=0 N(S) R(5) Y(s) Gy(s) Ge(s) H(s) b) (2 marks) The figure below shows a closed-loop system with a reference input and disturbance input. Obtain transfer functions C(s)/R(s) and C(s)/D(S) of the system shown. Use block diagram reduction method only. GF D(S) R(S) Es) U(5) Cs) GC...
Please solve both parts a and b step-by-step using the block
reduction method ONLY.
Q4 a) (1 mark) The figure below shows a block diagram of a control system, obtain the transfer function [Y(s)/R(s)]N=0 N(S) R(5) Y(s) Gy(s) Ge(s) H(s) b) (2 marks) The figure below shows a closed-loop system with a reference input and disturbance input. Obtain transfer functions C(s)/R(s) and C(s)/D(S) of the system shown. Use block diagram reduction method only. GF D(S) R(S) Es) U(5) Cs) GC...
Most questions answered within 3 hours.
-
A man stands on the roof of a building of height 13.0 mm and
throws a...
asked 2 minutes ago -
Based on the range, which of the following sets of scores has
the greatest variability? 3,...
asked 6 minutes ago -
The extent to which assets are financed by borrowed funds and
other liabilities is indicated by:...
asked 1 hour ago -
Explain in detail
Germany is the fifth largest economy
explain what goods and services Germany specializes...
asked 1 hour ago -
The density of platinum is 21.45 g/mL. If a cube of platinum
with a mass of...
asked 1 hour ago -
Accounts Receivable
Sales
A/R Posting
Extended Sales Invoice
Packing Slip
Compare invoice to packing slip 2...
asked 1 hour ago -
Michaella, age 23, is a full-time law student and is claimed by
her parents as a...
asked 1 hour ago -
Why are polymers not typically casted into products?
asked 1 hour ago -
When rolling a die 129 times, what is the probability of rolling
a 6 no more...
asked 2 hours ago -
4. A call option currently sells for $7.75. It has a strike
price of $85 and...
asked 1 hour ago -
1.
You need to prepare 10.0 liters of an acid aqueous solution with a
pH of...
asked 1 hour ago -
Along an aggregate supply curve, if the level of output is less
than the natural level...
asked 1 hour ago