please help answer all the question and dont skip. Thank you!
Homework Answers
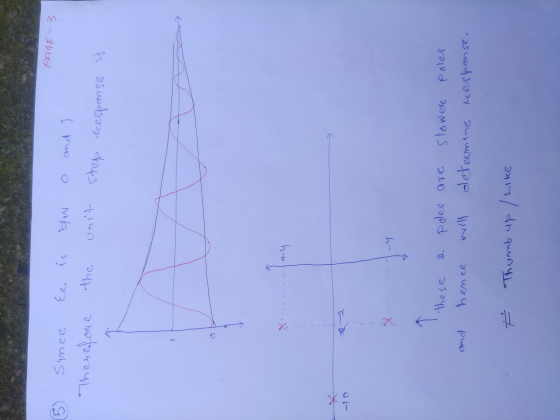
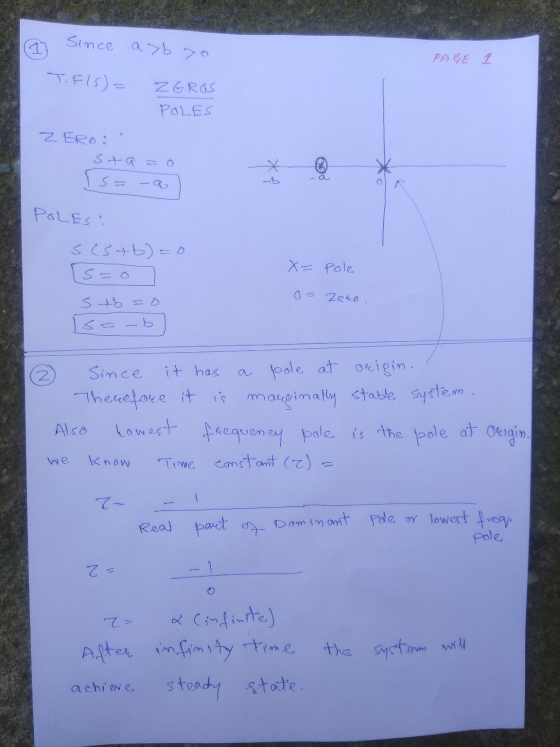
1:. Question solved on paper and uploaded .
2: Question solved on paper and uploaded .
3: These are actually controllers and are used to control the transient steady state responses as for the requirements.
The best system demands smallest rise time ,small settling time , smallest peak overshoot and small steady state error .To get the above requirements we add controllers to systems.
P in PID CONTROLLER stands for Proportional controler .It's purpose is to change the transient behaviour of the system by adjusting system gain.Transfer function isois written on paper .
I stands for Integral controller .it's purpose is to decrease the steady state errors inthe system.The integral controller adds 1 pole atbthe origin which increases the type of the system but the Steady state error decreases and stability is affected.. Before using Integral controller it is essential bro check the closed loop stability if the stability is affected then integral controller is not used.
D stands for derivative or Rate controller
It's purpose is to improve stability.The transfer function =sK
Example is tachometer .the derivative controller added 1 zero at the origin .Hence type decreases as type decreses the stability increses .the system becomes less stable.
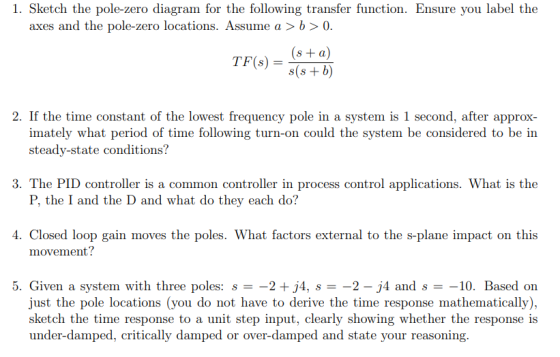
4:The external parameter which impact the movement is The damping ratio (zeta) .
Zeta is the ratio of Energy lost to energy stored.
Since this is a second order system it is dependent on zeta .
As shown on paper and
5: solved on paper.

Add Answer to:
please help answer all the question and dont skip. Thank
you!
1. Sketch the pole-zero diagram...
Poles and Zeros For the transfer function given: 0.85 8-44.64 G(s) = 긁+0.83 12.00 Part A-Poles Find the system pole 8 Submit Part B-Poles Find the system pole s2 Submit Part C-Zeros Find the system...
 Poles and Zeros For the transfer function given: 0.85 8-44.64 G(s) = 긁+0.83 12.00 Part A-Poles Find the system pole 8 Submit Part B-Poles Find the system pole s2 Submit Part C-Zeros Find the system zero Submit Part D-Type of Response Based on the locations af the poles and zeros, what will be the response to a unit step inpue? O Harmonic Oscillations (Marginally stable) Oscillatory motion with exponential decay tending to zero (stable O Critically damped exponential decay (stable)...
Poles and Zeros For the transfer function given: 0.85 8-44.64 G(s) = 긁+0.83 12.00 Part A-Poles Find the system pole 8 Submit Part B-Poles Find the system pole s2 Submit Part C-Zeros Find the system zero Submit Part D-Type of Response Based on the locations af the poles and zeros, what will be the response to a unit step inpue? O Harmonic Oscillations (Marginally stable) Oscillatory motion with exponential decay tending to zero (stable O Critically damped exponential decay (stable)...
these are useful formjlas to solve this problem please show all work! thank you 2.) Design...
 these are useful formjlas to solve this problem
please show all work! thank you
2.) Design compensator for zero steady-state error with 10% overshoot and 0.4s of Peak time for the open loop transfer function G specified below. Sketch the comparison between uncompensated and compensated responses. Also compare their root locus. Clearly mention the improvements achieved after compensation. (50 points = 10 pts for analyzing uncompensated system+5 pts for identifying controller type+25 pts for controller design+5 pts for response comparison+5...
these are useful formjlas to solve this problem
please show all work! thank you
2.) Design compensator for zero steady-state error with 10% overshoot and 0.4s of Peak time for the open loop transfer function G specified below. Sketch the comparison between uncompensated and compensated responses. Also compare their root locus. Clearly mention the improvements achieved after compensation. (50 points = 10 pts for analyzing uncompensated system+5 pts for identifying controller type+25 pts for controller design+5 pts for response comparison+5...
please show work thank you! Use Matlab to and the SISOTool construct the system for analysis...
 please show work
thank you!
Use Matlab to and the SISOTool construct the system for analysis (You may want to preview the tf and sisotool commands from matlab by typing help tf or doc tf etc...) Each Block B1, B2, B3 and B4 will be constructed individually and then concatenated together As shown in the block diagram let K=0.1 Set B1 = 0.1 by typing in matlab >>B1=0.1 To assign the Blockl values use the TF command to construct a...
please show work
thank you!
Use Matlab to and the SISOTool construct the system for analysis (You may want to preview the tf and sisotool commands from matlab by typing help tf or doc tf etc...) Each Block B1, B2, B3 and B4 will be constructed individually and then concatenated together As shown in the block diagram let K=0.1 Set B1 = 0.1 by typing in matlab >>B1=0.1 To assign the Blockl values use the TF command to construct a...
[Q-1, 12 Marks] Answer the following briefly: (Imprecise answers will get zero marks) 1· (a) Chec...
 Need b and c
[Q-1, 12 Marks] Answer the following briefly: (Imprecise answers will get zero marks) 1· (a) Check if the dominant poles concept is applicable (show your pole-zero skctch) to the system 630 G(s) (s2 16s 63) (s1.4s 2) and if it is, then i. Obtain the equivalent second order system transfer function i. Calculate the time to peak, overshoot and settling time iii. Sketch the second order system step response with the calculated parameters marked in the...
Need b and c
[Q-1, 12 Marks] Answer the following briefly: (Imprecise answers will get zero marks) 1· (a) Check if the dominant poles concept is applicable (show your pole-zero skctch) to the system 630 G(s) (s2 16s 63) (s1.4s 2) and if it is, then i. Obtain the equivalent second order system transfer function i. Calculate the time to peak, overshoot and settling time iii. Sketch the second order system step response with the calculated parameters marked in the...
E. If you double the value of kp, what are the new closed-loop pole locations and [5 points] how much overshoot does the step response have? Hint: It is possible to determine the original value...
 E. If you double the value of kp, what are the new closed-loop pole locations and [5 points] how much overshoot does the step response have? Hint: It is possible to determine the original value for kp. However, with the knowledge at this point, you can compute the pole locations without actually knowing kp (simply double the zero-order term in the denominator polyno- mial). Problem 2 You are confronted with a process that has the unknown transfer function G(s). It...
E. If you double the value of kp, what are the new closed-loop pole locations and [5 points] how much overshoot does the step response have? Hint: It is possible to determine the original value for kp. However, with the knowledge at this point, you can compute the pole locations without actually knowing kp (simply double the zero-order term in the denominator polyno- mial). Problem 2 You are confronted with a process that has the unknown transfer function G(s). It...
Please answer all parts or dont answer any of them. Analyzing Models step(sys,t) impulse(sys,t) Isim(sys,u,t) Time...
 Please answer all parts or dont answer any of them.
Analyzing Models step(sys,t) impulse(sys,t) Isim(sys,u,t) Time response for step input Time response for impulse input Time response for arbitrary input the system G6)55+6 EX Plot the responses o (a) step input, (b) impulse input; (c) sin(2/) ANS Poles and Zeros p-pole(sys) z-zero(sys) EX Find the poles and zcros for the following system Computes the poles p of the LTI model sys (p is a column vector). Returns the zeros of...
Please answer all parts or dont answer any of them.
Analyzing Models step(sys,t) impulse(sys,t) Isim(sys,u,t) Time response for step input Time response for impulse input Time response for arbitrary input the system G6)55+6 EX Plot the responses o (a) step input, (b) impulse input; (c) sin(2/) ANS Poles and Zeros p-pole(sys) z-zero(sys) EX Find the poles and zcros for the following system Computes the poles p of the LTI model sys (p is a column vector). Returns the zeros of...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root lo...
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
5 . A) A causal Continuous-time system has the following pole-zero diagram: jw S-plane Re -1...
 5 . A) A causal Continuous-time system has the following pole-zero diagram: jw S-plane Re -1 - Let y(t) = s(t) represent the response of this system to a unit-step signal 0; otherwise. Assume that the Unit-Step response s(t) of this system is known to approach 1 as t o. Determine y(t) = s(t), justify your answers mathematically.
5 . A) A causal Continuous-time system has the following pole-zero diagram: jw S-plane Re -1 - Let y(t) = s(t) represent the response of this system to a unit-step signal 0; otherwise. Assume that the Unit-Step response s(t) of this system is known to approach 1 as t o. Determine y(t) = s(t), justify your answers mathematically.
I have no more posting for this month, please solve these for me thanks 1. Given...
 I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
1. Consider the unity feedback system shown in figure 1 with G(S) -2sti a) Determine the...
 1. Consider the unity feedback system shown in figure 1 with G(S) -2sti a) Determine the closed loop transfer function TF(s) γ(s) R(s) What are the poles and zeros of TF1(s)? [2 marks] b) For TF(s), calculate the DC gain, natural frequency and damping ratio. Classify TF1(s) as underdamped overdamped, critically damped or undamped [3 marks] c) Use the initial value theorem and final value theorem to determine the initial value (Mo) and final value (M) of the [2 marks]...
1. Consider the unity feedback system shown in figure 1 with G(S) -2sti a) Determine the closed loop transfer function TF(s) γ(s) R(s) What are the poles and zeros of TF1(s)? [2 marks] b) For TF(s), calculate the DC gain, natural frequency and damping ratio. Classify TF1(s) as underdamped overdamped, critically damped or undamped [3 marks] c) Use the initial value theorem and final value theorem to determine the initial value (Mo) and final value (M) of the [2 marks]...
 Poles and Zeros For the transfer function given: 0.85 8-44.64 G(s) = 긁+0.83 12.00 Part A-Poles Find the system pole 8 Submit Part B-Poles Find the system pole s2 Submit Part C-Zeros Find the system zero Submit Part D-Type of Response Based on the locations af the poles and zeros, what will be the response to a unit step inpue? O Harmonic Oscillations (Marginally stable) Oscillatory motion with exponential decay tending to zero (stable O Critically damped exponential decay (stable)...
Poles and Zeros For the transfer function given: 0.85 8-44.64 G(s) = 긁+0.83 12.00 Part A-Poles Find the system pole 8 Submit Part B-Poles Find the system pole s2 Submit Part C-Zeros Find the system zero Submit Part D-Type of Response Based on the locations af the poles and zeros, what will be the response to a unit step inpue? O Harmonic Oscillations (Marginally stable) Oscillatory motion with exponential decay tending to zero (stable O Critically damped exponential decay (stable)...
 these are useful formjlas to solve this problem
please show all work! thank you
2.) Design compensator for zero steady-state error with 10% overshoot and 0.4s of Peak time for the open loop transfer function G specified below. Sketch the comparison between uncompensated and compensated responses. Also compare their root locus. Clearly mention the improvements achieved after compensation. (50 points = 10 pts for analyzing uncompensated system+5 pts for identifying controller type+25 pts for controller design+5 pts for response comparison+5...
these are useful formjlas to solve this problem
please show all work! thank you
2.) Design compensator for zero steady-state error with 10% overshoot and 0.4s of Peak time for the open loop transfer function G specified below. Sketch the comparison between uncompensated and compensated responses. Also compare their root locus. Clearly mention the improvements achieved after compensation. (50 points = 10 pts for analyzing uncompensated system+5 pts for identifying controller type+25 pts for controller design+5 pts for response comparison+5...
 please show work
thank you!
Use Matlab to and the SISOTool construct the system for analysis (You may want to preview the tf and sisotool commands from matlab by typing help tf or doc tf etc...) Each Block B1, B2, B3 and B4 will be constructed individually and then concatenated together As shown in the block diagram let K=0.1 Set B1 = 0.1 by typing in matlab >>B1=0.1 To assign the Blockl values use the TF command to construct a...
please show work
thank you!
Use Matlab to and the SISOTool construct the system for analysis (You may want to preview the tf and sisotool commands from matlab by typing help tf or doc tf etc...) Each Block B1, B2, B3 and B4 will be constructed individually and then concatenated together As shown in the block diagram let K=0.1 Set B1 = 0.1 by typing in matlab >>B1=0.1 To assign the Blockl values use the TF command to construct a...
 Need b and c
[Q-1, 12 Marks] Answer the following briefly: (Imprecise answers will get zero marks) 1· (a) Check if the dominant poles concept is applicable (show your pole-zero skctch) to the system 630 G(s) (s2 16s 63) (s1.4s 2) and if it is, then i. Obtain the equivalent second order system transfer function i. Calculate the time to peak, overshoot and settling time iii. Sketch the second order system step response with the calculated parameters marked in the...
Need b and c
[Q-1, 12 Marks] Answer the following briefly: (Imprecise answers will get zero marks) 1· (a) Check if the dominant poles concept is applicable (show your pole-zero skctch) to the system 630 G(s) (s2 16s 63) (s1.4s 2) and if it is, then i. Obtain the equivalent second order system transfer function i. Calculate the time to peak, overshoot and settling time iii. Sketch the second order system step response with the calculated parameters marked in the...
 E. If you double the value of kp, what are the new closed-loop pole locations and [5 points] how much overshoot does the step response have? Hint: It is possible to determine the original value for kp. However, with the knowledge at this point, you can compute the pole locations without actually knowing kp (simply double the zero-order term in the denominator polyno- mial). Problem 2 You are confronted with a process that has the unknown transfer function G(s). It...
E. If you double the value of kp, what are the new closed-loop pole locations and [5 points] how much overshoot does the step response have? Hint: It is possible to determine the original value for kp. However, with the knowledge at this point, you can compute the pole locations without actually knowing kp (simply double the zero-order term in the denominator polyno- mial). Problem 2 You are confronted with a process that has the unknown transfer function G(s). It...
 Please answer all parts or dont answer any of them.
Analyzing Models step(sys,t) impulse(sys,t) Isim(sys,u,t) Time response for step input Time response for impulse input Time response for arbitrary input the system G6)55+6 EX Plot the responses o (a) step input, (b) impulse input; (c) sin(2/) ANS Poles and Zeros p-pole(sys) z-zero(sys) EX Find the poles and zcros for the following system Computes the poles p of the LTI model sys (p is a column vector). Returns the zeros of...
Please answer all parts or dont answer any of them.
Analyzing Models step(sys,t) impulse(sys,t) Isim(sys,u,t) Time response for step input Time response for impulse input Time response for arbitrary input the system G6)55+6 EX Plot the responses o (a) step input, (b) impulse input; (c) sin(2/) ANS Poles and Zeros p-pole(sys) z-zero(sys) EX Find the poles and zcros for the following system Computes the poles p of the LTI model sys (p is a column vector). Returns the zeros of...
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
 5 . A) A causal Continuous-time system has the following pole-zero diagram: jw S-plane Re -1 - Let y(t) = s(t) represent the response of this system to a unit-step signal 0; otherwise. Assume that the Unit-Step response s(t) of this system is known to approach 1 as t o. Determine y(t) = s(t), justify your answers mathematically.
5 . A) A causal Continuous-time system has the following pole-zero diagram: jw S-plane Re -1 - Let y(t) = s(t) represent the response of this system to a unit-step signal 0; otherwise. Assume that the Unit-Step response s(t) of this system is known to approach 1 as t o. Determine y(t) = s(t), justify your answers mathematically.
 I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
 1. Consider the unity feedback system shown in figure 1 with G(S) -2sti a) Determine the closed loop transfer function TF(s) γ(s) R(s) What are the poles and zeros of TF1(s)? [2 marks] b) For TF(s), calculate the DC gain, natural frequency and damping ratio. Classify TF1(s) as underdamped overdamped, critically damped or undamped [3 marks] c) Use the initial value theorem and final value theorem to determine the initial value (Mo) and final value (M) of the [2 marks]...
1. Consider the unity feedback system shown in figure 1 with G(S) -2sti a) Determine the closed loop transfer function TF(s) γ(s) R(s) What are the poles and zeros of TF1(s)? [2 marks] b) For TF(s), calculate the DC gain, natural frequency and damping ratio. Classify TF1(s) as underdamped overdamped, critically damped or undamped [3 marks] c) Use the initial value theorem and final value theorem to determine the initial value (Mo) and final value (M) of the [2 marks]...
Most questions answered within 3 hours.
-
Under the influence of its drive force, a snowmobile is moving
at a constant velocity along...
asked 1 hour ago -
Why do organizations decline? What steps can top
management take to halt, decline, and restore organizational...
asked 1 hour ago -
. Suppose a discrete random variable has probability
distribution
P(x) = .2 if x = 0...
asked 49 minutes ago -
What mechanisms Drive speciation??
(I.e. what was Dawins theory on the orgin of species, and how...
asked 2 hours ago -
The manager at a car assembly plant believes that the mean
assembly time for a car...
asked 3 hours ago -
Which of the following is true of electron capture?
A) It decreases the nuclide's mass number...
asked 5 hours ago -
Assuming an efficiency of 43.10%, calculate the actual yield of
magnesium nitrate formed from 114.9 g...
asked 5 hours ago -
The highly pathogenic bacterium Clostridium
perfringens causes gangrene, a disease that results in the
destruction of...
asked 7 hours ago -
In the context of situation analysis, which of the following is
a category for analysis in...
asked 7 hours ago -
In a study of the gas phase decomposition of sulfuryl chloride
at 600 K SO2Cl2(g)SO2(g) +...
asked 7 hours ago -
75 g of 2-propanol (C3H8O) and 25 g of pentane are mixed in a
200 mL...
asked 7 hours ago -
The 2800-turn coil in a dc motor has an area per turn of 1.1 ×
10-2...
asked 7 hours ago