
Homework Answers
Answer:-
(1)
PID controller design:
increase the gain for the step response of the system such that the system oscillates . that gain is Km and the frequency of oscillations is Wm.
s=tf('s');
g=0.75*s/(s^2*(s+1)*(s+10));
sisotool(g)

The PID controller is
Kp= 0.6* 60 = 36
Kd= 86.25
Ki=3.75
the controller is Gc = Kp + Ki / s + Kd s
(2)
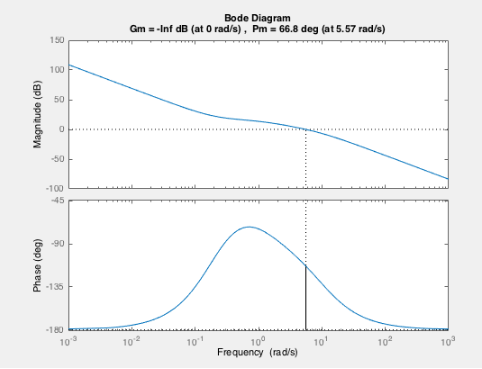
margins and cross over frequencies of uncompensated system
s=tf('s');
g=0.75*s/(s^2*(s+1)*(s+10));
margin(g)

(3)
margins and cross over frequencies of compensated system
s=tf('s');
g=0.75*s/(s^2*(s+1)*(s+10));
gc=36+86.25*s+(3.75/s);
margin(g)
figure
margin(g*gc)
(4)
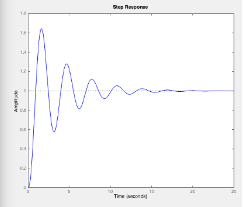
step response of the sysetms:
s=tf('s');
g=0.75*s/(s^2*(s+1)*(s+10));
gc=36+86.25*s+(3.75/s);
step(feedback(g,1),feedback(g*gc,1))
legend('uncompensated system ' , 'compensated system')

(5)
the PID gains can be tuned further based on the requirements like settling time ,proper damping ,overshoot
Add Answer to:
Assignment 1: PID tuning 1. Use the Ziegler-Nichols method to get an initial tuning of a...
Please show all steps. 1. Begin with zero gains and then increase Kp until you observe...
 Please show all steps.
1. Begin with zero gains and then increase Kp until you observe sustained oscillations, mark this value Km. 2. Mark the approximate frequency of oscillation wm 3. Then set the gains as follows: KP 0.6Km Note that if you are able to use Root Locus methods, you can formulate these values exactly 1. Use the Ziegler-Nichols method to get an initial tuning of a PID controller that improves the response of a system represented by the...
Please show all steps.
1. Begin with zero gains and then increase Kp until you observe sustained oscillations, mark this value Km. 2. Mark the approximate frequency of oscillation wm 3. Then set the gains as follows: KP 0.6Km Note that if you are able to use Root Locus methods, you can formulate these values exactly 1. Use the Ziegler-Nichols method to get an initial tuning of a PID controller that improves the response of a system represented by the...
In 1942, Ziegler and Nichols published a classic paper that introduced the continuous cycling method and the step t...
 In 1942, Ziegler and Nichols published a classic paper that introduced the continuous cycling method and the step test method for PID controller tuning. 3. (a) What are the other two ways to tune a PID controller? What are the advantages and disadvantages for the two methods? (10 marks) (b) A step test was carried out on an electrical oven. Using the data in Table Q3, process the reaction curve in Figure Q3 and produce the tuning parameters for a...
In 1942, Ziegler and Nichols published a classic paper that introduced the continuous cycling method and the step test method for PID controller tuning. 3. (a) What are the other two ways to tune a PID controller? What are the advantages and disadvantages for the two methods? (10 marks) (b) A step test was carried out on an electrical oven. Using the data in Table Q3, process the reaction curve in Figure Q3 and produce the tuning parameters for a...
6. At the local nuclear power plant, your boss wants you to use the Ziegler Nichols...
 6. At the local nuclear power plant, your boss wants you to use the Ziegler Nichols ultimate gain approach to design a PID controller. For some reason though, he doesn't want you to hook up a feedback loop and find the gain that results in marginal stability. The plant (at the nuclear power plant) is G(s) = s[(s+3)² +36] Your knowlege of the root locus and Routh-Hurwitz methods can help you to find Ky and Pu for the Ziegler Nichols...
6. At the local nuclear power plant, your boss wants you to use the Ziegler Nichols ultimate gain approach to design a PID controller. For some reason though, he doesn't want you to hook up a feedback loop and find the gain that results in marginal stability. The plant (at the nuclear power plant) is G(s) = s[(s+3)² +36] Your knowlege of the root locus and Routh-Hurwitz methods can help you to find Ky and Pu for the Ziegler Nichols...
You may prepare your answer in softcopy, print out and submit or use hardcopy approach. Put...
 You may prepare your answer in softcopy, print out and submit or use hardcopy approach. Put all your MATLAB codes and Simulink Diagram under the appendix. The system below is to be compensated to achieve a phase margin of 50 degrees. s +3 x(t) 5+2s+ 2s E-KH. yệt) Design gain and phase-lead compensator to achieve the desired PM of 45 degrees. +PART A: Uncompensated system analysis % created by Fakhera 2020 Determine the uncompensated PM and GM s=tf('s'); g= (5+3)/...
You may prepare your answer in softcopy, print out and submit or use hardcopy approach. Put all your MATLAB codes and Simulink Diagram under the appendix. The system below is to be compensated to achieve a phase margin of 50 degrees. s +3 x(t) 5+2s+ 2s E-KH. yệt) Design gain and phase-lead compensator to achieve the desired PM of 45 degrees. +PART A: Uncompensated system analysis % created by Fakhera 2020 Determine the uncompensated PM and GM s=tf('s'); g= (5+3)/...
ASAP ble 3 20 Pts. A transfer function Bode p ots are shown below. Answer the...
 ASAP
ble 3 20 Pts. A transfer function Bode p ots are shown below. Answer the following questions; please eatly draw the appropriate lines as needed, show your work and write your answers in the provided table a. What is the gain margin in dB? b. What is the phase margin in degrees? c. What is the ultimate gain Keu in dB? Also, convert Kc back from dB to a regular gain value. d. What is the ultimate frequency wy...
ASAP
ble 3 20 Pts. A transfer function Bode p ots are shown below. Answer the following questions; please eatly draw the appropriate lines as needed, show your work and write your answers in the provided table a. What is the gain margin in dB? b. What is the phase margin in degrees? c. What is the ultimate gain Keu in dB? Also, convert Kc back from dB to a regular gain value. d. What is the ultimate frequency wy...
9 T F Any control system must capable of reducing errors to some small value and...
 9 T F Any control system must capable of reducing errors to some small value and the system must be stable. 10 T F Delay time is the time needed for the response to reach 0.6 final value at the very first time. 11 T F The settling time in the second order system is 4 times of time constant. 12 T F Using PD controller in the position control system with a ramp input, to reduce the steady state...
9 T F Any control system must capable of reducing errors to some small value and the system must be stable. 10 T F Delay time is the time needed for the response to reach 0.6 final value at the very first time. 11 T F The settling time in the second order system is 4 times of time constant. 12 T F Using PD controller in the position control system with a ramp input, to reduce the steady state...
USE EXCEL i dont get what you mean!!! An industrial plant has the following transfer function:...
 USE EXCEL
i
dont get what you mean!!!
An industrial plant has the following transfer function: K G(S) = s(S+1)(s + 3) The industrial plant forms the forward path of a negative feedback control system with unity feedback (i) Draw the root locus of this control system. (ii) Using a suitable software program, perform the frequency analysis of the control system using the following techniques, assuming K 1: (a) Nyquist (Polar) Plot (b) Nichols Chart (c) Bode Plots (ii) Repeat...
USE EXCEL
i
dont get what you mean!!!
An industrial plant has the following transfer function: K G(S) = s(S+1)(s + 3) The industrial plant forms the forward path of a negative feedback control system with unity feedback (i) Draw the root locus of this control system. (ii) Using a suitable software program, perform the frequency analysis of the control system using the following techniques, assuming K 1: (a) Nyquist (Polar) Plot (b) Nichols Chart (c) Bode Plots (ii) Repeat...
solve quastion 3,4 and 5 B. Tasks and Guide 1. System description and Mathematical modeling The...
 solve quastion 3,4 and 5
B. Tasks and Guide 1. System description and Mathematical modeling The antenna positioning system is shown in Fig. 1. In this problem we consider the yaw angle control system, where 0(t) is the yaw angle. Suppose that the gain of the power amplifier is 5 , and that the gear ratio and the angle sensor (the shaft encoder and the data hold) are such that (t)= 0.40(t) where the units of v,(t) are volts and...
solve quastion 3,4 and 5
B. Tasks and Guide 1. System description and Mathematical modeling The antenna positioning system is shown in Fig. 1. In this problem we consider the yaw angle control system, where 0(t) is the yaw angle. Suppose that the gain of the power amplifier is 5 , and that the gear ratio and the angle sensor (the shaft encoder and the data hold) are such that (t)= 0.40(t) where the units of v,(t) are volts and...
 Please show all steps.
1. Begin with zero gains and then increase Kp until you observe sustained oscillations, mark this value Km. 2. Mark the approximate frequency of oscillation wm 3. Then set the gains as follows: KP 0.6Km Note that if you are able to use Root Locus methods, you can formulate these values exactly 1. Use the Ziegler-Nichols method to get an initial tuning of a PID controller that improves the response of a system represented by the...
Please show all steps.
1. Begin with zero gains and then increase Kp until you observe sustained oscillations, mark this value Km. 2. Mark the approximate frequency of oscillation wm 3. Then set the gains as follows: KP 0.6Km Note that if you are able to use Root Locus methods, you can formulate these values exactly 1. Use the Ziegler-Nichols method to get an initial tuning of a PID controller that improves the response of a system represented by the...
 In 1942, Ziegler and Nichols published a classic paper that introduced the continuous cycling method and the step test method for PID controller tuning. 3. (a) What are the other two ways to tune a PID controller? What are the advantages and disadvantages for the two methods? (10 marks) (b) A step test was carried out on an electrical oven. Using the data in Table Q3, process the reaction curve in Figure Q3 and produce the tuning parameters for a...
In 1942, Ziegler and Nichols published a classic paper that introduced the continuous cycling method and the step test method for PID controller tuning. 3. (a) What are the other two ways to tune a PID controller? What are the advantages and disadvantages for the two methods? (10 marks) (b) A step test was carried out on an electrical oven. Using the data in Table Q3, process the reaction curve in Figure Q3 and produce the tuning parameters for a...
 6. At the local nuclear power plant, your boss wants you to use the Ziegler Nichols ultimate gain approach to design a PID controller. For some reason though, he doesn't want you to hook up a feedback loop and find the gain that results in marginal stability. The plant (at the nuclear power plant) is G(s) = s[(s+3)² +36] Your knowlege of the root locus and Routh-Hurwitz methods can help you to find Ky and Pu for the Ziegler Nichols...
6. At the local nuclear power plant, your boss wants you to use the Ziegler Nichols ultimate gain approach to design a PID controller. For some reason though, he doesn't want you to hook up a feedback loop and find the gain that results in marginal stability. The plant (at the nuclear power plant) is G(s) = s[(s+3)² +36] Your knowlege of the root locus and Routh-Hurwitz methods can help you to find Ky and Pu for the Ziegler Nichols...
 You may prepare your answer in softcopy, print out and submit or use hardcopy approach. Put all your MATLAB codes and Simulink Diagram under the appendix. The system below is to be compensated to achieve a phase margin of 50 degrees. s +3 x(t) 5+2s+ 2s E-KH. yệt) Design gain and phase-lead compensator to achieve the desired PM of 45 degrees. +PART A: Uncompensated system analysis % created by Fakhera 2020 Determine the uncompensated PM and GM s=tf('s'); g= (5+3)/...
You may prepare your answer in softcopy, print out and submit or use hardcopy approach. Put all your MATLAB codes and Simulink Diagram under the appendix. The system below is to be compensated to achieve a phase margin of 50 degrees. s +3 x(t) 5+2s+ 2s E-KH. yệt) Design gain and phase-lead compensator to achieve the desired PM of 45 degrees. +PART A: Uncompensated system analysis % created by Fakhera 2020 Determine the uncompensated PM and GM s=tf('s'); g= (5+3)/...
 ASAP
ble 3 20 Pts. A transfer function Bode p ots are shown below. Answer the following questions; please eatly draw the appropriate lines as needed, show your work and write your answers in the provided table a. What is the gain margin in dB? b. What is the phase margin in degrees? c. What is the ultimate gain Keu in dB? Also, convert Kc back from dB to a regular gain value. d. What is the ultimate frequency wy...
ASAP
ble 3 20 Pts. A transfer function Bode p ots are shown below. Answer the following questions; please eatly draw the appropriate lines as needed, show your work and write your answers in the provided table a. What is the gain margin in dB? b. What is the phase margin in degrees? c. What is the ultimate gain Keu in dB? Also, convert Kc back from dB to a regular gain value. d. What is the ultimate frequency wy...
 9 T F Any control system must capable of reducing errors to some small value and the system must be stable. 10 T F Delay time is the time needed for the response to reach 0.6 final value at the very first time. 11 T F The settling time in the second order system is 4 times of time constant. 12 T F Using PD controller in the position control system with a ramp input, to reduce the steady state...
9 T F Any control system must capable of reducing errors to some small value and the system must be stable. 10 T F Delay time is the time needed for the response to reach 0.6 final value at the very first time. 11 T F The settling time in the second order system is 4 times of time constant. 12 T F Using PD controller in the position control system with a ramp input, to reduce the steady state...
 USE EXCEL
i
dont get what you mean!!!
An industrial plant has the following transfer function: K G(S) = s(S+1)(s + 3) The industrial plant forms the forward path of a negative feedback control system with unity feedback (i) Draw the root locus of this control system. (ii) Using a suitable software program, perform the frequency analysis of the control system using the following techniques, assuming K 1: (a) Nyquist (Polar) Plot (b) Nichols Chart (c) Bode Plots (ii) Repeat...
USE EXCEL
i
dont get what you mean!!!
An industrial plant has the following transfer function: K G(S) = s(S+1)(s + 3) The industrial plant forms the forward path of a negative feedback control system with unity feedback (i) Draw the root locus of this control system. (ii) Using a suitable software program, perform the frequency analysis of the control system using the following techniques, assuming K 1: (a) Nyquist (Polar) Plot (b) Nichols Chart (c) Bode Plots (ii) Repeat...
 solve quastion 3,4 and 5
B. Tasks and Guide 1. System description and Mathematical modeling The antenna positioning system is shown in Fig. 1. In this problem we consider the yaw angle control system, where 0(t) is the yaw angle. Suppose that the gain of the power amplifier is 5 , and that the gear ratio and the angle sensor (the shaft encoder and the data hold) are such that (t)= 0.40(t) where the units of v,(t) are volts and...
solve quastion 3,4 and 5
B. Tasks and Guide 1. System description and Mathematical modeling The antenna positioning system is shown in Fig. 1. In this problem we consider the yaw angle control system, where 0(t) is the yaw angle. Suppose that the gain of the power amplifier is 5 , and that the gear ratio and the angle sensor (the shaft encoder and the data hold) are such that (t)= 0.40(t) where the units of v,(t) are volts and...
Most questions answered within 3 hours.
-
The pH of a sample of water from a river is 5.0. A
sample of effluent from...
asked 11 minutes ago -
At the beginning of the period, the Fabricating Department
budgeted direct labor of $136,500 and equipment...
asked 38 minutes ago -
Please answer all
____ 28. Rent control is usually
justified on the grounds that it protects...
asked 38 minutes ago -
PARTS A-D HAVE BEEN ANSWERED. WAS TOLD TO REPOST. ONLY ANSWER
PARTS E and F.
A...
asked 56 minutes ago -
2) You are given the task of finding a representation for a
circle in a drawing...
asked 2 hours ago -
STUDY QUESTION: Does use of diet drug fen-phen
(fenfluramine-phentermine) cause valvular heart disease?
HINT: Valvular heart...
asked 1 hour ago -
1. An object weighing 40 N rests on a surface. The coefficient
of friction is 0.35....
asked 3 hours ago -
Investor company owns 35% of investee company voting stock and
accounts for the investment under the...
asked 4 hours ago -
The number of major faults on a randomly chosen 1 km stretch of
highway has a...
asked 4 hours ago -
Consider the competitive environment of Starbuck's, Progressive
Insurance, a manufacturing firm with low turnover, or a...
asked 5 hours ago -
3. Gains from trade
Consider two neighbouring island countries called Euphoria and
Contente. They each have...
asked 7 hours ago -
A business executive has the option to invest money in two
plans: Plan A guarantees that...
asked 9 hours ago