![Question 3:[4 Marks] A causal and stable LTI system has the property that: 4 4 a) Determine the frequency response H(e/ø) for the system. b) Determine a difference equation relating any input x(n) and the corresponding output y(n)](http://img.homeworklib.com/questions/596bbcf0-c8e8-11eb-85c7-dda1db2f7476.png?x-oss-process=image/resize,w_560)
Homework Answers

Add Answer to:
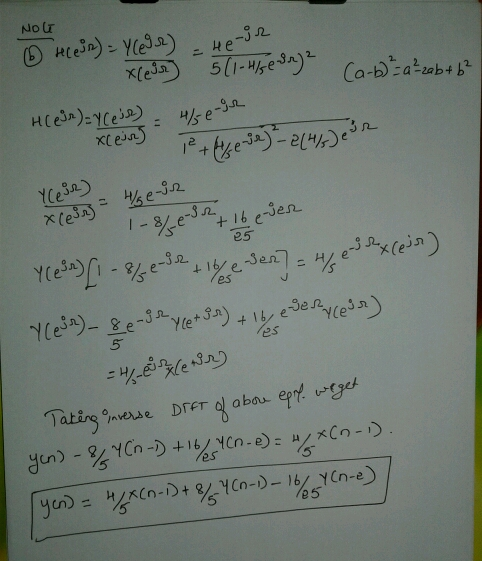
A causal and stable LTI system has the property that:
〖(4/5)〗^n u(n) →n 〖(4/5)〗^n u(n)
Determine...
7. A causal LTI system has a transfer function given by H (z) = -1 (1...
 7. A causal LTI system has a transfer function given by H (z) = -1 (1 4 The input to the system is x[n] = (0.5)"u[n] + u[-n-1] ) Find the impulse response of the system b) Determine the difference equation that describes the system. c) Find the output y[n]. d) Is the system stable?
7. A causal LTI system has a transfer function given by H (z) = -1 (1 4 The input to the system is x[n] = (0.5)"u[n] + u[-n-1] ) Find the impulse response of the system b) Determine the difference equation that describes the system. c) Find the output y[n]. d) Is the system stable?
(2) Consider the causal discrete-time LTI system with an input r (n) and an output y(n)...
 (2) Consider the causal discrete-time LTI system with an input r (n) and an output y(n) as shown in Figure 1, where K 6 (constant), system #1 is described by its impulse response: h(n) = -36(n) + 0.48(n- 1)+8.26(n-2), and system # 2 has the difference equation given by: y(n)+0.1y(n-1)+0.3y(n-2)- 2a(n). (a) Determine the corresponding difference equation of the system #1. Hence, write its fre- quency response. (b) Find the frequency response of system #2. 1 system #1 system #2...
(2) Consider the causal discrete-time LTI system with an input r (n) and an output y(n) as shown in Figure 1, where K 6 (constant), system #1 is described by its impulse response: h(n) = -36(n) + 0.48(n- 1)+8.26(n-2), and system # 2 has the difference equation given by: y(n)+0.1y(n-1)+0.3y(n-2)- 2a(n). (a) Determine the corresponding difference equation of the system #1. Hence, write its fre- quency response. (b) Find the frequency response of system #2. 1 system #1 system #2...
discrete time signals and systems causal LTI system has the block diagram: (a) find a difference...
 discrete time signals and systems
causal LTI system has the block diagram:
(a) find a difference equation relating y[n] and x[n]
(b) determine if the system is stable
// هبه ۸[u] [u]x
discrete time signals and systems
causal LTI system has the block diagram:
(a) find a difference equation relating y[n] and x[n]
(b) determine if the system is stable
// هبه ۸[u] [u]x
Consider a LTI system with impulse response h[n] = u[n]*a^n, where |a| < 1. a) Determine...
Consider a LTI system with impulse response h[n] = u[n]*a^n, where |a| < 1. a) Determine the frequency response of the system. b) Find the magnitude response and the phase response, given a = 1/2. No plots. c) Consider a LTI system whose impulse response h1[n] is a time-shifted version of h[n], i.e., h1[n] = h[n − n0]. Compute the frequency response H1(e^(jΩ)), and represent H1(e^(jΩ)) in terms of H(e^(jΩ)).
2.6.1 Consider a causal continuous-time LTI system described by the differential equation u"(t) +...
 2.6.1-2.6.62.6.1 Consider a causal contimuous-time LTI system described by the differential equation$$ y^{\prime \prime}(t)+y(t)=x(t) $$(a) Find the transfer function \(H(s)\), its \(R O C\), and its poles.(b) Find the impulse response \(h(t)\).(c) Classify the system as stable/unstable.(d) Find the step response of the system.2.6.2 Given the impulse response of a continuous-time LTI system, find the transfer function \(H(s),\) the \(\mathrm{ROC}\) of \(H(s)\), and the poles of the system. Also find the differential equation describing each system.(a) \(h(t)=\sin (3 t) u(t)\)(b)...
2.6.1-2.6.62.6.1 Consider a causal contimuous-time LTI system described by the differential equation$$ y^{\prime \prime}(t)+y(t)=x(t) $$(a) Find the transfer function \(H(s)\), its \(R O C\), and its poles.(b) Find the impulse response \(h(t)\).(c) Classify the system as stable/unstable.(d) Find the step response of the system.2.6.2 Given the impulse response of a continuous-time LTI system, find the transfer function \(H(s),\) the \(\mathrm{ROC}\) of \(H(s)\), and the poles of the system. Also find the differential equation describing each system.(a) \(h(t)=\sin (3 t) u(t)\)(b)...
3.21. An LTI system has the impulse response h()-u(t+7)-u(t-8) (a) Determine whether this system is causal...
 3.21. An LTI system has the impulse response h()-u(t+7)-u(t-8) (a) Determine whether this system is causal (b) Determine whether this system is stable. (c) Find the system response to the input x(f) 8(t-2)-28(t+ 2)
3.21. An LTI system has the impulse response h()-u(t+7)-u(t-8) (a) Determine whether this system is causal (b) Determine whether this system is stable. (c) Find the system response to the input x(f) 8(t-2)-28(t+ 2)
Determine the output response y[n] of a causal LTI digital system with an impulse response
Determine the output response y[n] of a causal LTI digital system with an impulse response h[n]=2(0.2)n μ[n] for an input sequence x[n] = 4(0.3)n μ[n]
1. A causal LTI system is implemented by the difference equation y(n) = 2r(n) - 0.5...
 1. A causal LTI system is implemented by the difference equation y(n) = 2r(n) - 0.5 y(n-1). (a) Find the frequency response H/(w) of the system. (b) Plot the pole-zero diagram of the system. Based on the pole zero diagram, roughly sketch the frequency response magnitude |H'(w). (c) Indicate on your sketch of H w , its exact values at w=0, 0.5, and . (d) Find the output signal y(n) produced by the input signal (n) = 3 + cos(0.5...
1. A causal LTI system is implemented by the difference equation y(n) = 2r(n) - 0.5 y(n-1). (a) Find the frequency response H/(w) of the system. (b) Plot the pole-zero diagram of the system. Based on the pole zero diagram, roughly sketch the frequency response magnitude |H'(w). (c) Indicate on your sketch of H w , its exact values at w=0, 0.5, and . (d) Find the output signal y(n) produced by the input signal (n) = 3 + cos(0.5...
Consider a causal LTI system with frequency response H(jw) = 1 2 + jw For a...
 Consider a causal LTI system with frequency response H(jw) = 1 2 + jw For a particular input x(t) this system is observed to produce the output y(t) = e-ºut) - e-stutt) i) Determine x(t). ii) Is this system stable? Explain your reasoning. iii) Plot the magnitude and phase responses of H (jw).
Consider a causal LTI system with frequency response H(jw) = 1 2 + jw For a particular input x(t) this system is observed to produce the output y(t) = e-ºut) - e-stutt) i) Determine x(t). ii) Is this system stable? Explain your reasoning. iii) Plot the magnitude and phase responses of H (jw).
A causal discrete-time LTI system is described by the equation
A causal discrete-time LTI system is described by the equationwhere z is the input signal, and y the output signal y(n) = 1/3x(n) + 1/3x(n -1) + 1/3x(n - 2) (a) Sketch the impulse response of the system. (b) What is the dc gain of the system? (Find Hf(0).) (c) Sketch the output of the system when the input x(n) is the constant unity signal, x(n) = 1. (d) Sketch the output of the system when the input x(n) is the unit step signal, x(n)...
 7. A causal LTI system has a transfer function given by H (z) = -1 (1 4 The input to the system is x[n] = (0.5)"u[n] + u[-n-1] ) Find the impulse response of the system b) Determine the difference equation that describes the system. c) Find the output y[n]. d) Is the system stable?
7. A causal LTI system has a transfer function given by H (z) = -1 (1 4 The input to the system is x[n] = (0.5)"u[n] + u[-n-1] ) Find the impulse response of the system b) Determine the difference equation that describes the system. c) Find the output y[n]. d) Is the system stable?
 (2) Consider the causal discrete-time LTI system with an input r (n) and an output y(n) as shown in Figure 1, where K 6 (constant), system #1 is described by its impulse response: h(n) = -36(n) + 0.48(n- 1)+8.26(n-2), and system # 2 has the difference equation given by: y(n)+0.1y(n-1)+0.3y(n-2)- 2a(n). (a) Determine the corresponding difference equation of the system #1. Hence, write its fre- quency response. (b) Find the frequency response of system #2. 1 system #1 system #2...
(2) Consider the causal discrete-time LTI system with an input r (n) and an output y(n) as shown in Figure 1, where K 6 (constant), system #1 is described by its impulse response: h(n) = -36(n) + 0.48(n- 1)+8.26(n-2), and system # 2 has the difference equation given by: y(n)+0.1y(n-1)+0.3y(n-2)- 2a(n). (a) Determine the corresponding difference equation of the system #1. Hence, write its fre- quency response. (b) Find the frequency response of system #2. 1 system #1 system #2...
 discrete time signals and systems
causal LTI system has the block diagram:
(a) find a difference equation relating y[n] and x[n]
(b) determine if the system is stable
// هبه ۸[u] [u]x
discrete time signals and systems
causal LTI system has the block diagram:
(a) find a difference equation relating y[n] and x[n]
(b) determine if the system is stable
// هبه ۸[u] [u]x
 2.6.1-2.6.62.6.1 Consider a causal contimuous-time LTI system described by the differential equation$$ y^{\prime \prime}(t)+y(t)=x(t) $$(a) Find the transfer function \(H(s)\), its \(R O C\), and its poles.(b) Find the impulse response \(h(t)\).(c) Classify the system as stable/unstable.(d) Find the step response of the system.2.6.2 Given the impulse response of a continuous-time LTI system, find the transfer function \(H(s),\) the \(\mathrm{ROC}\) of \(H(s)\), and the poles of the system. Also find the differential equation describing each system.(a) \(h(t)=\sin (3 t) u(t)\)(b)...
2.6.1-2.6.62.6.1 Consider a causal contimuous-time LTI system described by the differential equation$$ y^{\prime \prime}(t)+y(t)=x(t) $$(a) Find the transfer function \(H(s)\), its \(R O C\), and its poles.(b) Find the impulse response \(h(t)\).(c) Classify the system as stable/unstable.(d) Find the step response of the system.2.6.2 Given the impulse response of a continuous-time LTI system, find the transfer function \(H(s),\) the \(\mathrm{ROC}\) of \(H(s)\), and the poles of the system. Also find the differential equation describing each system.(a) \(h(t)=\sin (3 t) u(t)\)(b)...
 3.21. An LTI system has the impulse response h()-u(t+7)-u(t-8) (a) Determine whether this system is causal (b) Determine whether this system is stable. (c) Find the system response to the input x(f) 8(t-2)-28(t+ 2)
3.21. An LTI system has the impulse response h()-u(t+7)-u(t-8) (a) Determine whether this system is causal (b) Determine whether this system is stable. (c) Find the system response to the input x(f) 8(t-2)-28(t+ 2)
 1. A causal LTI system is implemented by the difference equation y(n) = 2r(n) - 0.5 y(n-1). (a) Find the frequency response H/(w) of the system. (b) Plot the pole-zero diagram of the system. Based on the pole zero diagram, roughly sketch the frequency response magnitude |H'(w). (c) Indicate on your sketch of H w , its exact values at w=0, 0.5, and . (d) Find the output signal y(n) produced by the input signal (n) = 3 + cos(0.5...
1. A causal LTI system is implemented by the difference equation y(n) = 2r(n) - 0.5 y(n-1). (a) Find the frequency response H/(w) of the system. (b) Plot the pole-zero diagram of the system. Based on the pole zero diagram, roughly sketch the frequency response magnitude |H'(w). (c) Indicate on your sketch of H w , its exact values at w=0, 0.5, and . (d) Find the output signal y(n) produced by the input signal (n) = 3 + cos(0.5...
 Consider a causal LTI system with frequency response H(jw) = 1 2 + jw For a particular input x(t) this system is observed to produce the output y(t) = e-ºut) - e-stutt) i) Determine x(t). ii) Is this system stable? Explain your reasoning. iii) Plot the magnitude and phase responses of H (jw).
Consider a causal LTI system with frequency response H(jw) = 1 2 + jw For a particular input x(t) this system is observed to produce the output y(t) = e-ºut) - e-stutt) i) Determine x(t). ii) Is this system stable? Explain your reasoning. iii) Plot the magnitude and phase responses of H (jw).
Most questions answered within 3 hours.
-
The extent to which assets are financed by borrowed funds and
other liabilities is indicated by:...
asked 16 minutes ago -
Explain in detail
Germany is the fifth largest economy
explain what goods and services Germany specializes...
asked 31 minutes ago -
The density of platinum is 21.45 g/mL. If a cube of platinum
with a mass of...
asked 36 minutes ago -
Accounts Receivable
Sales
A/R Posting
Extended Sales Invoice
Packing Slip
Compare invoice to packing slip 2...
asked 39 minutes ago -
Michaella, age 23, is a full-time law student and is claimed by
her parents as a...
asked 40 minutes ago -
Why are polymers not typically casted into products?
asked 57 minutes ago -
When rolling a die 129 times, what is the probability of rolling
a 6 no more...
asked 1 hour ago -
4. A call option currently sells for $7.75. It has a strike
price of $85 and...
asked 1 hour ago -
1.
You need to prepare 10.0 liters of an acid aqueous solution with a
pH of...
asked 1 hour ago -
Along an aggregate supply curve, if the level of output is less
than the natural level...
asked 1 hour ago -
By 2025, annual consumption in emerging markets will total $30
trillion and contribute more than ________...
asked 1 hour ago -
At what point does reformation cease to be a viable option for
those who are oppressed...
asked 1 hour ago