
Homework Answers



Add Answer to:
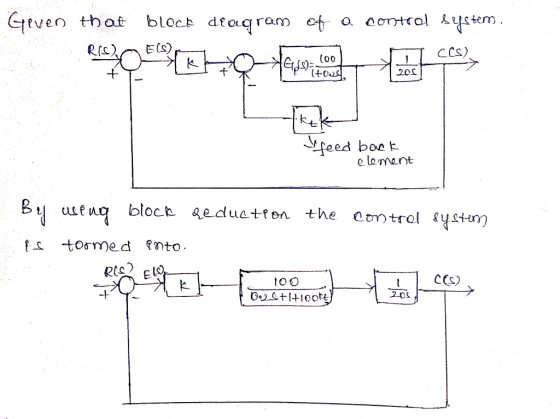
1- Consider the block diagram of a control system shown in Fig. 1 Rts) E ts) C(s) Gt-11027 20s Fi...
Problem 1: Steady-state error analvsis (a) A block diagram of a feedback control system is given ...
 The Class Name is: MAE 318 System Dynamics and Control I
Problem 1: Steady-state error analvsis (a) A block diagram of a feedback control system is given below. Assuming that the tunable constant Khas a value that makes this closed-loop system stable, find the steady-state error of the closed-loop system for (a a step reference input with amplitude R, r(t)- R u(t) (ii) a ramp reference input with slope R, r(t) = Rt-us(t) R(s) Y(s) (s+2)(s +5) (b) A block...
The Class Name is: MAE 318 System Dynamics and Control I
Problem 1: Steady-state error analvsis (a) A block diagram of a feedback control system is given below. Assuming that the tunable constant Khas a value that makes this closed-loop system stable, find the steady-state error of the closed-loop system for (a a step reference input with amplitude R, r(t)- R u(t) (ii) a ramp reference input with slope R, r(t) = Rt-us(t) R(s) Y(s) (s+2)(s +5) (b) A block...
For the feedback control system shown to the right: Find the steady state error with respect...
 For the feedback control system shown to the right: Find the steady state error with respect to the reference input and the disturbance for step, ramp, and parabolic inputs. Assume the inputs are 2s2 +3s+3 Equation Input Ste Ramp Parabolic H(s) = 1 r(t) = w(t) = 4t2 a. find the error to a step, ramp and parabolic input (reference input) b. find the error to a step. ramp and parabolic input (disturbance input)
For the feedback control system shown to the right: Find the steady state error with respect to the reference input and the disturbance for step, ramp, and parabolic inputs. Assume the inputs are 2s2 +3s+3 Equation Input Ste Ramp Parabolic H(s) = 1 r(t) = w(t) = 4t2 a. find the error to a step, ramp and parabolic input (reference input) b. find the error to a step. ramp and parabolic input (disturbance input)
Consider the closed loop system defined by the following block diagram. a) Compute the transfer function...
 Consider the closed loop system defined by the following block diagram. a) Compute the transfer function E(s)/R(s). b) Determine the steady state error for a unit-step 1. Controller ant Itly Ro- +- HI- 4단Toy , c) d) e) reference input signal. Determine the steady state error response for a unit-ramp reference input signal. Determine the locations of the closed loop poles of the system. Select system parameters kp and ki in terms of k so that damping coefficient V2/2 and...
Consider the closed loop system defined by the following block diagram. a) Compute the transfer function E(s)/R(s). b) Determine the steady state error for a unit-step 1. Controller ant Itly Ro- +- HI- 4단Toy , c) d) e) reference input signal. Determine the steady state error response for a unit-ramp reference input signal. Determine the locations of the closed loop poles of the system. Select system parameters kp and ki in terms of k so that damping coefficient V2/2 and...
Controller Plant 10s+5 (s+.8)(s--1) DAG) A feedback control system is shown in Figure 4.48 (a) Determine...
 Controller Plant 10s+5 (s+.8)(s--1) DAG) A feedback control system is shown in Figure 4.48 (a) Determine the system Type with respect to the reference input. (b) Compute the steady-state tracking errors for unit step and ramp inputs (e) Determine the system Type with respect to the disturbance input, w (d) Compute the steady-state errors for unit step and ramp đisturbance inputs 4.30
Controller Plant 10s+5 (s+.8)(s--1) DAG) A feedback control system is shown in Figure 4.48 (a) Determine the system Type with respect to the reference input. (b) Compute the steady-state tracking errors for unit step and ramp inputs (e) Determine the system Type with respect to the disturbance input, w (d) Compute the steady-state errors for unit step and ramp đisturbance inputs 4.30
consider a feedback control system shown in Fig.1, where Problem 3 Consider a feedback control system...
 consider a feedback control system shown in Fig.1, where
Problem 3 Consider a feedback control system shown in Fig. 1, where s2 +s+4 1. Is the system open-loop stable? 2. Determine the value of the proportional gain K such that the phase margin is Ap 3. What is the gain margin with this gain K? 50
consider a feedback control system shown in Fig.1, where
Problem 3 Consider a feedback control system shown in Fig. 1, where s2 +s+4 1. Is the system open-loop stable? 2. Determine the value of the proportional gain K such that the phase margin is Ap 3. What is the gain margin with this gain K? 50
Spring 2019 3. Given a closed-loop control system with unity feedback is shown in the block...
 Spring 2019 3. Given a closed-loop control system with unity feedback is shown in the block diagram. G(s) is the open-loop transfer function, and the controller is a gain, K. 1. (20) Calculate the open-loop transfer function tar →Q--t G(s) (10) Calculate the steady-state error to a step input of the open-loop system. 7. (in Bode Form) from the Bode plot. (10) Calculate the shortest possible settling time with a percentage overshoot of 5% or less. 8. 2. (10)Plot the...
Spring 2019 3. Given a closed-loop control system with unity feedback is shown in the block diagram. G(s) is the open-loop transfer function, and the controller is a gain, K. 1. (20) Calculate the open-loop transfer function tar →Q--t G(s) (10) Calculate the steady-state error to a step input of the open-loop system. 7. (in Bode Form) from the Bode plot. (10) Calculate the shortest possible settling time with a percentage overshoot of 5% or less. 8. 2. (10)Plot the...
1 - Consider the system shown in the figure below, #1 25 Ks a) Determine the...
 1 - Consider the system shown in the figure below, #1 25 Ks a) Determine the value of k that yields a damping ratio ? of 0.6 b) Based on the numerical value found for k in part (a) of the problem, determine (10 points) the open-loop gain and the system's type. Determine the steady-state errors for the system when it is subjected to (6 points) c) 1. a step reference input, r()-A 2. a ramp reference input, r()-t (6...
1 - Consider the system shown in the figure below, #1 25 Ks a) Determine the value of k that yields a damping ratio ? of 0.6 b) Based on the numerical value found for k in part (a) of the problem, determine (10 points) the open-loop gain and the system's type. Determine the steady-state errors for the system when it is subjected to (6 points) c) 1. a step reference input, r()-A 2. a ramp reference input, r()-t (6...
Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+2...
 Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+200) G(s) = Do the following using Matlab: a) Sketch the root locus. b) Find the range of gain, K that makes the system stable c) Find the value of K that yields a damping ratio of 0.707 for the system's closed-loop dominant poles. d) Obtain Ts, Tp, %OS for the closed loop system in part c). e) Find the value of K that yields...
Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+200) G(s) = Do the following using Matlab: a) Sketch the root locus. b) Find the range of gain, K that makes the system stable c) Find the value of K that yields a damping ratio of 0.707 for the system's closed-loop dominant poles. d) Obtain Ts, Tp, %OS for the closed loop system in part c). e) Find the value of K that yields...
Need help with 1a and 1b. Please show all work I (a) The unit step response...
 Need help with 1a and 1b. Please show all work
I (a) The unit step response of a linear control system is shown below: 1.35 1.0 0 0.1 (sec) Find the transfer function of the second-order prototype system to model the system (b) The block diagram of a unity feedback control system is shown below. Find the step-, ramp-, and parabolic-error constants. The error signal is defined to be e(t). Find the steady-state errors in terms of K and Kt...
Need help with 1a and 1b. Please show all work
I (a) The unit step response of a linear control system is shown below: 1.35 1.0 0 0.1 (sec) Find the transfer function of the second-order prototype system to model the system (b) The block diagram of a unity feedback control system is shown below. Find the step-, ramp-, and parabolic-error constants. The error signal is defined to be e(t). Find the steady-state errors in terms of K and Kt...
2. A feedback control system is subject to disturbances at the actuator input, as shown in the following block diagram. Remember that you need to use the final value theorem (and not the table) when...
 2. A feedback control system is subject to disturbances at the actuator input, as shown in the following block diagram. Remember that you need to use the final value theorem (and not the table) when dealing with any other input other than the reference. See the last 3 pages, 12-15, of my steady-state error lecture notes for examples on how to deal with disturbance rather than reference inputs D(s) 1 Y(s) $3+2s2+2s If the reference command is r(t) 1S 0,...
2. A feedback control system is subject to disturbances at the actuator input, as shown in the following block diagram. Remember that you need to use the final value theorem (and not the table) when dealing with any other input other than the reference. See the last 3 pages, 12-15, of my steady-state error lecture notes for examples on how to deal with disturbance rather than reference inputs D(s) 1 Y(s) $3+2s2+2s If the reference command is r(t) 1S 0,...
 The Class Name is: MAE 318 System Dynamics and Control I
Problem 1: Steady-state error analvsis (a) A block diagram of a feedback control system is given below. Assuming that the tunable constant Khas a value that makes this closed-loop system stable, find the steady-state error of the closed-loop system for (a a step reference input with amplitude R, r(t)- R u(t) (ii) a ramp reference input with slope R, r(t) = Rt-us(t) R(s) Y(s) (s+2)(s +5) (b) A block...
The Class Name is: MAE 318 System Dynamics and Control I
Problem 1: Steady-state error analvsis (a) A block diagram of a feedback control system is given below. Assuming that the tunable constant Khas a value that makes this closed-loop system stable, find the steady-state error of the closed-loop system for (a a step reference input with amplitude R, r(t)- R u(t) (ii) a ramp reference input with slope R, r(t) = Rt-us(t) R(s) Y(s) (s+2)(s +5) (b) A block...
 For the feedback control system shown to the right: Find the steady state error with respect to the reference input and the disturbance for step, ramp, and parabolic inputs. Assume the inputs are 2s2 +3s+3 Equation Input Ste Ramp Parabolic H(s) = 1 r(t) = w(t) = 4t2 a. find the error to a step, ramp and parabolic input (reference input) b. find the error to a step. ramp and parabolic input (disturbance input)
For the feedback control system shown to the right: Find the steady state error with respect to the reference input and the disturbance for step, ramp, and parabolic inputs. Assume the inputs are 2s2 +3s+3 Equation Input Ste Ramp Parabolic H(s) = 1 r(t) = w(t) = 4t2 a. find the error to a step, ramp and parabolic input (reference input) b. find the error to a step. ramp and parabolic input (disturbance input)
 Consider the closed loop system defined by the following block diagram. a) Compute the transfer function E(s)/R(s). b) Determine the steady state error for a unit-step 1. Controller ant Itly Ro- +- HI- 4단Toy , c) d) e) reference input signal. Determine the steady state error response for a unit-ramp reference input signal. Determine the locations of the closed loop poles of the system. Select system parameters kp and ki in terms of k so that damping coefficient V2/2 and...
Consider the closed loop system defined by the following block diagram. a) Compute the transfer function E(s)/R(s). b) Determine the steady state error for a unit-step 1. Controller ant Itly Ro- +- HI- 4단Toy , c) d) e) reference input signal. Determine the steady state error response for a unit-ramp reference input signal. Determine the locations of the closed loop poles of the system. Select system parameters kp and ki in terms of k so that damping coefficient V2/2 and...
 Controller Plant 10s+5 (s+.8)(s--1) DAG) A feedback control system is shown in Figure 4.48 (a) Determine the system Type with respect to the reference input. (b) Compute the steady-state tracking errors for unit step and ramp inputs (e) Determine the system Type with respect to the disturbance input, w (d) Compute the steady-state errors for unit step and ramp đisturbance inputs 4.30
Controller Plant 10s+5 (s+.8)(s--1) DAG) A feedback control system is shown in Figure 4.48 (a) Determine the system Type with respect to the reference input. (b) Compute the steady-state tracking errors for unit step and ramp inputs (e) Determine the system Type with respect to the disturbance input, w (d) Compute the steady-state errors for unit step and ramp đisturbance inputs 4.30
 consider a feedback control system shown in Fig.1, where
Problem 3 Consider a feedback control system shown in Fig. 1, where s2 +s+4 1. Is the system open-loop stable? 2. Determine the value of the proportional gain K such that the phase margin is Ap 3. What is the gain margin with this gain K? 50
consider a feedback control system shown in Fig.1, where
Problem 3 Consider a feedback control system shown in Fig. 1, where s2 +s+4 1. Is the system open-loop stable? 2. Determine the value of the proportional gain K such that the phase margin is Ap 3. What is the gain margin with this gain K? 50
 Spring 2019 3. Given a closed-loop control system with unity feedback is shown in the block diagram. G(s) is the open-loop transfer function, and the controller is a gain, K. 1. (20) Calculate the open-loop transfer function tar →Q--t G(s) (10) Calculate the steady-state error to a step input of the open-loop system. 7. (in Bode Form) from the Bode plot. (10) Calculate the shortest possible settling time with a percentage overshoot of 5% or less. 8. 2. (10)Plot the...
Spring 2019 3. Given a closed-loop control system with unity feedback is shown in the block diagram. G(s) is the open-loop transfer function, and the controller is a gain, K. 1. (20) Calculate the open-loop transfer function tar →Q--t G(s) (10) Calculate the steady-state error to a step input of the open-loop system. 7. (in Bode Form) from the Bode plot. (10) Calculate the shortest possible settling time with a percentage overshoot of 5% or less. 8. 2. (10)Plot the...
 1 - Consider the system shown in the figure below, #1 25 Ks a) Determine the value of k that yields a damping ratio ? of 0.6 b) Based on the numerical value found for k in part (a) of the problem, determine (10 points) the open-loop gain and the system's type. Determine the steady-state errors for the system when it is subjected to (6 points) c) 1. a step reference input, r()-A 2. a ramp reference input, r()-t (6...
1 - Consider the system shown in the figure below, #1 25 Ks a) Determine the value of k that yields a damping ratio ? of 0.6 b) Based on the numerical value found for k in part (a) of the problem, determine (10 points) the open-loop gain and the system's type. Determine the steady-state errors for the system when it is subjected to (6 points) c) 1. a step reference input, r()-A 2. a ramp reference input, r()-t (6...
 Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+200) G(s) = Do the following using Matlab: a) Sketch the root locus. b) Find the range of gain, K that makes the system stable c) Find the value of K that yields a damping ratio of 0.707 for the system's closed-loop dominant poles. d) Obtain Ts, Tp, %OS for the closed loop system in part c). e) Find the value of K that yields...
Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+200) G(s) = Do the following using Matlab: a) Sketch the root locus. b) Find the range of gain, K that makes the system stable c) Find the value of K that yields a damping ratio of 0.707 for the system's closed-loop dominant poles. d) Obtain Ts, Tp, %OS for the closed loop system in part c). e) Find the value of K that yields...
 Need help with 1a and 1b. Please show all work
I (a) The unit step response of a linear control system is shown below: 1.35 1.0 0 0.1 (sec) Find the transfer function of the second-order prototype system to model the system (b) The block diagram of a unity feedback control system is shown below. Find the step-, ramp-, and parabolic-error constants. The error signal is defined to be e(t). Find the steady-state errors in terms of K and Kt...
Need help with 1a and 1b. Please show all work
I (a) The unit step response of a linear control system is shown below: 1.35 1.0 0 0.1 (sec) Find the transfer function of the second-order prototype system to model the system (b) The block diagram of a unity feedback control system is shown below. Find the step-, ramp-, and parabolic-error constants. The error signal is defined to be e(t). Find the steady-state errors in terms of K and Kt...
 2. A feedback control system is subject to disturbances at the actuator input, as shown in the following block diagram. Remember that you need to use the final value theorem (and not the table) when dealing with any other input other than the reference. See the last 3 pages, 12-15, of my steady-state error lecture notes for examples on how to deal with disturbance rather than reference inputs D(s) 1 Y(s) $3+2s2+2s If the reference command is r(t) 1S 0,...
2. A feedback control system is subject to disturbances at the actuator input, as shown in the following block diagram. Remember that you need to use the final value theorem (and not the table) when dealing with any other input other than the reference. See the last 3 pages, 12-15, of my steady-state error lecture notes for examples on how to deal with disturbance rather than reference inputs D(s) 1 Y(s) $3+2s2+2s If the reference command is r(t) 1S 0,...
Most questions answered within 3 hours.
-
1. Answer A-D having to do with Ohm's Law:
A. What is the resistance of a...
asked 11 minutes ago -
Question :1 (40%, 8% per sub question)
A firm is evaluating two mutually exclusive projects that...
asked 24 minutes ago -
Acme Company insured its building on a replacement cost basis
for $700,000 under a property insurance...
asked 24 minutes ago -
Suppose 4.8 g of zinc is treated with 7.4 g of pure hydrogen
chloride. What is...
asked 33 minutes ago -
In an effort to cut down on garbage, Custodial Staff remove all
the garbage/recycling/compost cans from...
asked 34 minutes ago -
Access control is an important function in data security.
Specifically, tell me why access control is...
asked 40 minutes ago -
In the "Go" button add 15 random numbers in the array using a
random number generator....
asked 42 minutes ago -
5. Draw Molecular Orbital Diagrams for C2, C2 and C2. a. Determine the bond order for...
asked 3 years ago -
The emergency room at Hospital Systems, Inc (HIS) serves
patients who arrive according to
a Poisson...
asked 54 minutes ago -
The chickens at Colonel Thompson's Ranch have a mean weight of
1850 g, with a standard...
asked 1 hour ago -
The time married men with children spend on child care averages
5.9 hours per week (Time,...
asked 1 hour ago -
There are many minerals which contain sliver. One of them,
smithite, is placed in water and...
asked 1 hour ago