
Homework Answers



Add Answer to:
5. Consider a plant given by G()+2(s+1 in a un (s+2)(2s+1) 1n a unity feedback structure. (a) Det...
Controller Plant 10s+5 (s+.8)(s--1) DAG) A feedback control system is shown in Figure 4.48 (a) Determine...
 Controller Plant 10s+5 (s+.8)(s--1) DAG) A feedback control system is shown in Figure 4.48 (a) Determine the system Type with respect to the reference input. (b) Compute the steady-state tracking errors for unit step and ramp inputs (e) Determine the system Type with respect to the disturbance input, w (d) Compute the steady-state errors for unit step and ramp đisturbance inputs 4.30
Controller Plant 10s+5 (s+.8)(s--1) DAG) A feedback control system is shown in Figure 4.48 (a) Determine the system Type with respect to the reference input. (b) Compute the steady-state tracking errors for unit step and ramp inputs (e) Determine the system Type with respect to the disturbance input, w (d) Compute the steady-state errors for unit step and ramp đisturbance inputs 4.30
6 and controller C(s), as shown in the Consider a unity-feedback control system with plant G(s)-...
 6 and controller C(s), as shown in the Consider a unity-feedback control system with plant G(s)- following figure. Reference Error Controller Plant r(t) e(t) u(t) y(t) C(s) G(s) [5] (a) Determine the poles, zeros, order, type, relative degree, and de gain of the plant G(s) and show [5] (b) Can a P controller C(s)Kp stabilize the plant G(s)? If so, find the values of Kp that are [4] (c) Show using the Final Value Theorem that the system with the...
6 and controller C(s), as shown in the Consider a unity-feedback control system with plant G(s)- following figure. Reference Error Controller Plant r(t) e(t) u(t) y(t) C(s) G(s) [5] (a) Determine the poles, zeros, order, type, relative degree, and de gain of the plant G(s) and show [5] (b) Can a P controller C(s)Kp stabilize the plant G(s)? If so, find the values of Kp that are [4] (c) Show using the Final Value Theorem that the system with the...
1. Consider a unity feedback control system with the transfer function G(s) = 1/[s(s+ 2)] in...
1. Consider a unity feedback control system with the transfer function G(s) = 1/[s(s+ 2)] in the forward path. (a) Design a proportional controller that yields a stable system with percent overshoot less that 5% for the step input (b) Find settling time and peak time of the closed-loop system designed in part (a); (c) Design a PD compensator that reduces the settling time computed in (b) by a factor of 4 while keeping the percent overshoot less that 5%...
A uncompensated (un-controlled) feedback system with and plant transfer function are shown below. Design a PI...
 A uncompensated (un-controlled) feedback system with and plant
transfer function are shown below. Design a PI controller that you
could add that will drive the steady-state error to zero for a
unity step reference, and operate with a damping ratio of 0.5.
Provide the resulting %OS, and 2% settling time. You must show the
analytical process and all steps you took to design your
controller.
Use MATLAB/Simulink to simulate the system and your feed-back
controller for a unity step input...
A uncompensated (un-controlled) feedback system with and plant
transfer function are shown below. Design a PI controller that you
could add that will drive the steady-state error to zero for a
unity step reference, and operate with a damping ratio of 0.5.
Provide the resulting %OS, and 2% settling time. You must show the
analytical process and all steps you took to design your
controller.
Use MATLAB/Simulink to simulate the system and your feed-back
controller for a unity step input...
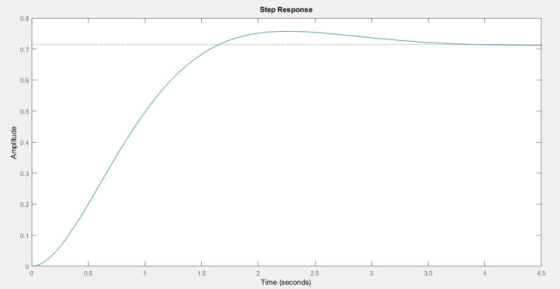
5 Problem 4.41 Consider the second-order plant with transfer function: 1 G(s) = (s1)(5s 1) and...
 5 Problem 4.41 Consider the second-order plant with transfer function: 1 G(s) = (s1)(5s 1) and in a unity feedback structure 1. Determine the system type and error constant with respect to tracking polynomial reference inputs of the system for P (i.e., De = kp), PD (i.e., Dc = kp+kps), and PID (i.e., De=kp +ki/s+ kps) controllers. Let kp = 19,ki 0.5,kp = 4/19. 2. Determine the system type and error constant of the system with respect to disturbance inputs...
5 Problem 4.41 Consider the second-order plant with transfer function: 1 G(s) = (s1)(5s 1) and in a unity feedback structure 1. Determine the system type and error constant with respect to tracking polynomial reference inputs of the system for P (i.e., De = kp), PD (i.e., Dc = kp+kps), and PID (i.e., De=kp +ki/s+ kps) controllers. Let kp = 19,ki 0.5,kp = 4/19. 2. Determine the system type and error constant of the system with respect to disturbance inputs...
2. Consider a unity feedback system, where (5+5 marks) P(s) = 5+1 K(s) = 548 Find...
 2. Consider a unity feedback system, where (5+5 marks) P(s) = 5+1 K(s) = 548 Find values of a and B that assure (a) Zero steady-state error to a step command. (b) Steady-state error to a ramp command less than 0.01.
2. Consider a unity feedback system, where (5+5 marks) P(s) = 5+1 K(s) = 548 Find values of a and B that assure (a) Zero steady-state error to a step command. (b) Steady-state error to a ramp command less than 0.01.
R(S) C(s) G(s) Figure P3 G(S) K(s2 – 2s + 2) s(s + 1)(8 +2) Problem...
 R(S) C(s) G(s) Figure P3 G(S) K(s2 – 2s + 2) s(s + 1)(8 +2) Problem 4) (25 points) Consider the same unity feedback control system given in Figure P3 and do the following: a. Determine the system type (type 0, type 1, type 2, etc.) and justify it. (05 points) b. Suppose that 10% maximum overshoot is required as a transient response specification. Find the steady-state error for this P-controlled system, where K = 0.24 for a unit step...
R(S) C(s) G(s) Figure P3 G(S) K(s2 – 2s + 2) s(s + 1)(8 +2) Problem 4) (25 points) Consider the same unity feedback control system given in Figure P3 and do the following: a. Determine the system type (type 0, type 1, type 2, etc.) and justify it. (05 points) b. Suppose that 10% maximum overshoot is required as a transient response specification. Find the steady-state error for this P-controlled system, where K = 0.24 for a unit step...
urgent!! II Lag/lead Compensator Design A certain plant with unity feedback has the model given by GP(s) s(1 +0.1s) (1 0.2s) Design a phase-lag OR phase-lead compensator such that: 1. The steady-...
 urgent!!
II Lag/lead Compensator Design A certain plant with unity feedback has the model given by GP(s) s(1 +0.1s) (1 0.2s) Design a phase-lag OR phase-lead compensator such that: 1. The steady- state error with respect to a unit ramp input is no more than 0.01; 2. Phase margin is approximately 40
II Lag/lead Compensator Design A certain plant with unity feedback has the model given by GP(s) s(1 +0.1s) (1 0.2s) Design a phase-lag OR phase-lead compensator such that:...
urgent!!
II Lag/lead Compensator Design A certain plant with unity feedback has the model given by GP(s) s(1 +0.1s) (1 0.2s) Design a phase-lag OR phase-lead compensator such that: 1. The steady- state error with respect to a unit ramp input is no more than 0.01; 2. Phase margin is approximately 40
II Lag/lead Compensator Design A certain plant with unity feedback has the model given by GP(s) s(1 +0.1s) (1 0.2s) Design a phase-lag OR phase-lead compensator such that:...
PROBLEM 4 A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the lsim function of MATLAB, calculate and obtain the g...
 PROBLEM 4 A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for 0,(1)-a. Here a ; 0.5%, Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G. (s) with the following controller: K2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence...
PROBLEM 4 A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for 0,(1)-a. Here a ; 0.5%, Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G. (s) with the following controller: K2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence...
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller trans...
 Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
 Controller Plant 10s+5 (s+.8)(s--1) DAG) A feedback control system is shown in Figure 4.48 (a) Determine the system Type with respect to the reference input. (b) Compute the steady-state tracking errors for unit step and ramp inputs (e) Determine the system Type with respect to the disturbance input, w (d) Compute the steady-state errors for unit step and ramp đisturbance inputs 4.30
Controller Plant 10s+5 (s+.8)(s--1) DAG) A feedback control system is shown in Figure 4.48 (a) Determine the system Type with respect to the reference input. (b) Compute the steady-state tracking errors for unit step and ramp inputs (e) Determine the system Type with respect to the disturbance input, w (d) Compute the steady-state errors for unit step and ramp đisturbance inputs 4.30
 6 and controller C(s), as shown in the Consider a unity-feedback control system with plant G(s)- following figure. Reference Error Controller Plant r(t) e(t) u(t) y(t) C(s) G(s) [5] (a) Determine the poles, zeros, order, type, relative degree, and de gain of the plant G(s) and show [5] (b) Can a P controller C(s)Kp stabilize the plant G(s)? If so, find the values of Kp that are [4] (c) Show using the Final Value Theorem that the system with the...
6 and controller C(s), as shown in the Consider a unity-feedback control system with plant G(s)- following figure. Reference Error Controller Plant r(t) e(t) u(t) y(t) C(s) G(s) [5] (a) Determine the poles, zeros, order, type, relative degree, and de gain of the plant G(s) and show [5] (b) Can a P controller C(s)Kp stabilize the plant G(s)? If so, find the values of Kp that are [4] (c) Show using the Final Value Theorem that the system with the...
 A uncompensated (un-controlled) feedback system with and plant
transfer function are shown below. Design a PI controller that you
could add that will drive the steady-state error to zero for a
unity step reference, and operate with a damping ratio of 0.5.
Provide the resulting %OS, and 2% settling time. You must show the
analytical process and all steps you took to design your
controller.
Use MATLAB/Simulink to simulate the system and your feed-back
controller for a unity step input...
A uncompensated (un-controlled) feedback system with and plant
transfer function are shown below. Design a PI controller that you
could add that will drive the steady-state error to zero for a
unity step reference, and operate with a damping ratio of 0.5.
Provide the resulting %OS, and 2% settling time. You must show the
analytical process and all steps you took to design your
controller.
Use MATLAB/Simulink to simulate the system and your feed-back
controller for a unity step input...
 5 Problem 4.41 Consider the second-order plant with transfer function: 1 G(s) = (s1)(5s 1) and in a unity feedback structure 1. Determine the system type and error constant with respect to tracking polynomial reference inputs of the system for P (i.e., De = kp), PD (i.e., Dc = kp+kps), and PID (i.e., De=kp +ki/s+ kps) controllers. Let kp = 19,ki 0.5,kp = 4/19. 2. Determine the system type and error constant of the system with respect to disturbance inputs...
5 Problem 4.41 Consider the second-order plant with transfer function: 1 G(s) = (s1)(5s 1) and in a unity feedback structure 1. Determine the system type and error constant with respect to tracking polynomial reference inputs of the system for P (i.e., De = kp), PD (i.e., Dc = kp+kps), and PID (i.e., De=kp +ki/s+ kps) controllers. Let kp = 19,ki 0.5,kp = 4/19. 2. Determine the system type and error constant of the system with respect to disturbance inputs...
 2. Consider a unity feedback system, where (5+5 marks) P(s) = 5+1 K(s) = 548 Find values of a and B that assure (a) Zero steady-state error to a step command. (b) Steady-state error to a ramp command less than 0.01.
2. Consider a unity feedback system, where (5+5 marks) P(s) = 5+1 K(s) = 548 Find values of a and B that assure (a) Zero steady-state error to a step command. (b) Steady-state error to a ramp command less than 0.01.
 R(S) C(s) G(s) Figure P3 G(S) K(s2 – 2s + 2) s(s + 1)(8 +2) Problem 4) (25 points) Consider the same unity feedback control system given in Figure P3 and do the following: a. Determine the system type (type 0, type 1, type 2, etc.) and justify it. (05 points) b. Suppose that 10% maximum overshoot is required as a transient response specification. Find the steady-state error for this P-controlled system, where K = 0.24 for a unit step...
R(S) C(s) G(s) Figure P3 G(S) K(s2 – 2s + 2) s(s + 1)(8 +2) Problem 4) (25 points) Consider the same unity feedback control system given in Figure P3 and do the following: a. Determine the system type (type 0, type 1, type 2, etc.) and justify it. (05 points) b. Suppose that 10% maximum overshoot is required as a transient response specification. Find the steady-state error for this P-controlled system, where K = 0.24 for a unit step...
 urgent!!
II Lag/lead Compensator Design A certain plant with unity feedback has the model given by GP(s) s(1 +0.1s) (1 0.2s) Design a phase-lag OR phase-lead compensator such that: 1. The steady- state error with respect to a unit ramp input is no more than 0.01; 2. Phase margin is approximately 40
II Lag/lead Compensator Design A certain plant with unity feedback has the model given by GP(s) s(1 +0.1s) (1 0.2s) Design a phase-lag OR phase-lead compensator such that:...
urgent!!
II Lag/lead Compensator Design A certain plant with unity feedback has the model given by GP(s) s(1 +0.1s) (1 0.2s) Design a phase-lag OR phase-lead compensator such that: 1. The steady- state error with respect to a unit ramp input is no more than 0.01; 2. Phase margin is approximately 40
II Lag/lead Compensator Design A certain plant with unity feedback has the model given by GP(s) s(1 +0.1s) (1 0.2s) Design a phase-lag OR phase-lead compensator such that:...
 PROBLEM 4 A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for 0,(1)-a. Here a ; 0.5%, Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G. (s) with the following controller: K2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence...
PROBLEM 4 A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for 0,(1)-a. Here a ; 0.5%, Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G. (s) with the following controller: K2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence...
 Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
Most questions answered within 3 hours.
-
Assembly Programming
INCLUDE Irvine32.inc
Make a program that takes a string and a word as inputs...
asked 3 minutes ago -
Can I get a C++ code and output for this program using classes
instead of using...
asked 8 minutes ago -
A 4.0 L flask containing chlorine gas is connected to an
evacuated 3.0 L flask. If...
asked 19 minutes ago -
The number of years of education of self-employed individuals in
the United States has a population...
asked 6 minutes ago -
Write an essay containing your thoughts on
whether corporations should be limited in the amount of...
asked 20 minutes ago -
Given the following two sequences x (n)=[3 , 11,7 ,0 ,−1, 4 ,2
],−3≤n≤ 3 ;...
asked 19 minutes ago -
What is the minimal sample size needed for a 95% confidence
interval to have a maximal...
asked 21 minutes ago -
1. Methods of collecting data - Experiments and direct
observation
In each of the following situations,...
asked 34 minutes ago -
Each protein is composed of a maximum of ____________ different
amino acids in varying numbers and...
asked 51 minutes ago -
One member in the comp set that did not have supply, demand, and
revenue data. What...
asked 29 minutes ago -
What is the density of a substance that takes up 3.4e3 cubic cm
and weighs 1.96...
asked 44 minutes ago -
Consider a single wire loop of radius a. Calculate the magnetic
field B(z) along the axis...
asked 40 minutes ago