
Homework Answers

Add Answer to:
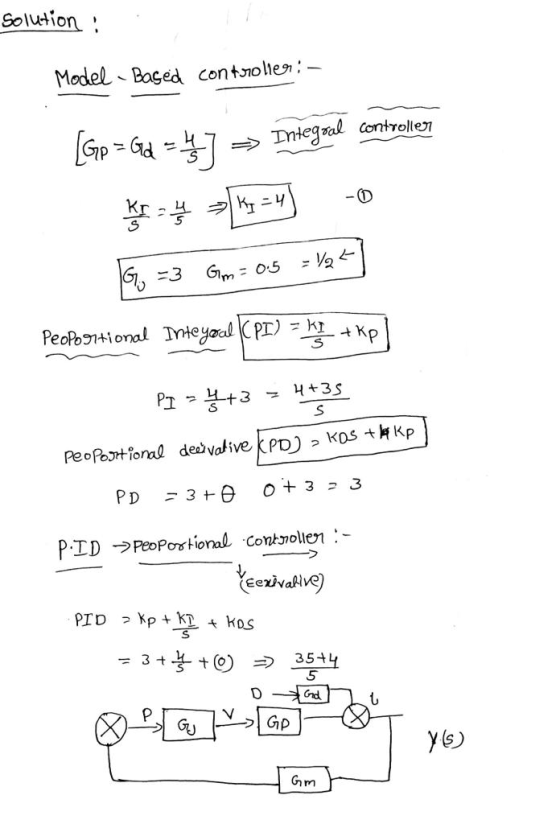
A) Based on the following transfer functions, use a model-based controller design method to desig...
D9.2 Design a state-feedback controller for the following systems. Determine the controller gains, open-loop transfer functions,...
 D9.2 Design a state-feedback controller for the following systems. Determine the controller gains, open-loop transfer functions, and closed-loop transfer functions Use the open-loop transfer functions to obtain root locus, Bode plots, and gain and phase margins LU u=-kx + r Closed-loop poles at s --1tj 2
D9.2 Design a state-feedback controller for the following systems. Determine the controller gains, open-loop transfer functions, and closed-loop transfer functions Use the open-loop transfer functions to obtain root locus, Bode plots, and gain and phase margins LU u=-kx + r Closed-loop poles at s --1tj 2
A standard feedback control loop is shown below: 0.125 36s213s 1 0.125 a) Determine y(t) for the ...
 A standard feedback control loop is shown below: 0.125 36s213s 1 0.125 a) Determine y(t) for the open loop response (i.e. controller in 'manual' mode) to a unit step-change disturbance (3 marks) b) If G 1, derive y(t) for the closed loop response (i.e. controller in 'automatic' mode) to a unit step-change disturbance, and calculate the off-set. (4 marks) c) If Gc is to be a Pl or PID controller, use the Direct Synthesis or Internal Model Control method to...
A standard feedback control loop is shown below: 0.125 36s213s 1 0.125 a) Determine y(t) for the open loop response (i.e. controller in 'manual' mode) to a unit step-change disturbance (3 marks) b) If G 1, derive y(t) for the closed loop response (i.e. controller in 'automatic' mode) to a unit step-change disturbance, and calculate the off-set. (4 marks) c) If Gc is to be a Pl or PID controller, use the Direct Synthesis or Internal Model Control method to...
4) A unity feedback control system shown in Figure 2 has the following controller and process with the transfer functions: m(60100c Prs(s +10(s+7.5) a) Obtain the open- and closed-loop transfer f...
 4) A unity feedback control system shown in Figure 2 has the following controller and process with the transfer functions: m(60100c Prs(s +10(s+7.5) a) Obtain the open- and closed-loop transfer functions of the system. b) Obtain the stability conditions using the Routh-Hurwitz criterion. e) Setting by trial-and-error some values for Kp, Ki, and Ko, obtain the time response for minimum overshoot and minimum settling time by Matlab/Simulink. Y(s) R(s) E(s) Fig. 2: Unity feedback control system
4) A unity feedback...
4) A unity feedback control system shown in Figure 2 has the following controller and process with the transfer functions: m(60100c Prs(s +10(s+7.5) a) Obtain the open- and closed-loop transfer functions of the system. b) Obtain the stability conditions using the Routh-Hurwitz criterion. e) Setting by trial-and-error some values for Kp, Ki, and Ko, obtain the time response for minimum overshoot and minimum settling time by Matlab/Simulink. Y(s) R(s) E(s) Fig. 2: Unity feedback control system
4) A unity feedback...
PD & PID controller design Consider a unity feedback system with open loop transfer function, G(s)...
 PD & PID controller design Consider a unity feedback system with open loop transfer function, G(s) = 20/s(s+2)(8+4). Design a PD controller so that the closed loop has a damping ratio of 0.8 and natural frequency of oscillation as 2 rad/sec. b) 100 Consider a unity feedback system with open loop transfer function, aus. Design a PID controller, so that the phase margin of (S-1) (s + 2) (s+10) the system is 45° at a frequency of 4 rad/scc and...
PD & PID controller design Consider a unity feedback system with open loop transfer function, G(s) = 20/s(s+2)(8+4). Design a PD controller so that the closed loop has a damping ratio of 0.8 and natural frequency of oscillation as 2 rad/sec. b) 100 Consider a unity feedback system with open loop transfer function, aus. Design a PID controller, so that the phase margin of (S-1) (s + 2) (s+10) the system is 45° at a frequency of 4 rad/scc and...
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller trans...
 Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
A second-order process is described by its transfer function G(s) = (s+1)(843) and a PI controlle...
 A second-order process is described by its transfer function G(s) = (s+1)(843) and a PI controller by Consider feedback control with unit feedback gain as shown in Figure 1 A disturbance D(s) exists, and to achieve zero steady-state error, a small integral component is applied. Technical limitations restrict the controller gain kp to values of 0.2 or less. The goal is to examine the influence of the controller parameter k on the dynamic response. D(s) Controller Process X(s) Y(s) Figure...
A second-order process is described by its transfer function G(s) = (s+1)(843) and a PI controller by Consider feedback control with unit feedback gain as shown in Figure 1 A disturbance D(s) exists, and to achieve zero steady-state error, a small integral component is applied. Technical limitations restrict the controller gain kp to values of 0.2 or less. The goal is to examine the influence of the controller parameter k on the dynamic response. D(s) Controller Process X(s) Y(s) Figure...
Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%....
 Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
muibliam 5(20%). The closed-loop system is given below. Controller (a) (S%) Find the system transfer function and discuss the range of Ko to make the eystom stuibie assuming K (t)(S%) Find the...
 muibliam 5(20%). The closed-loop system is given below. Controller (a) (S%) Find the system transfer function and discuss the range of Ko to make the eystom stuibie assuming K (t)(S%) Find the percentage of overshoot and stendy state error to the unit ramp input as a function of your design parameter Ke assuming K4 ( d) 5%) Find hed sagn parameters Ko and Kr such that the damping ratio of the closed- lonp system is O15 and the steady state...
muibliam 5(20%). The closed-loop system is given below. Controller (a) (S%) Find the system transfer function and discuss the range of Ko to make the eystom stuibie assuming K (t)(S%) Find the percentage of overshoot and stendy state error to the unit ramp input as a function of your design parameter Ke assuming K4 ( d) 5%) Find hed sagn parameters Ko and Kr such that the damping ratio of the closed- lonp system is O15 and the steady state...
find the following: a)state transition matrix? b)output as function of time? c)design a state feedback controller to...
 find the following:
a)state transition matrix?
b)output as function of time?
c)design a state feedback controller to place closed loop at (-3)
and (-5)
Question (: (10 hO Considering the following system, 01x + 0 t<0 tt t20 Where x(0)-L1] , u(t)-(% ,u(t) a) Find the state transition matrix. (3 marks) b) Find the output as a function of time. (3 marks) c) Design a state feedback controller to place the closed loop poles at (-3) and (-5). (4 marks)...
find the following:
a)state transition matrix?
b)output as function of time?
c)design a state feedback controller to place closed loop at (-3)
and (-5)
Question (: (10 hO Considering the following system, 01x + 0 t<0 tt t20 Where x(0)-L1] , u(t)-(% ,u(t) a) Find the state transition matrix. (3 marks) b) Find the output as a function of time. (3 marks) c) Design a state feedback controller to place the closed loop poles at (-3) and (-5). (4 marks)...
Give me the explanation plz 2. a) A digital controller implementation for a feedback system is shown in Figure 2 where the sampling period is T0.1 second. The plant transfer function is s +10 P(s) =...
 Give me the explanation plz
2. a) A digital controller implementation for a feedback system is shown in Figure 2 where the sampling period is T0.1 second. The plant transfer function is s +10 P(s) = and the feedback controller, K, is a simple proportional gain (K>0).v R(z) E(z) S+10 Controller ZOH Plant Figure 2* i)o In order to directly design a digital controller in the z-domain, the plant P(s) 6. needs to be discretised as P(z). Find the ZOH...
Give me the explanation plz
2. a) A digital controller implementation for a feedback system is shown in Figure 2 where the sampling period is T0.1 second. The plant transfer function is s +10 P(s) = and the feedback controller, K, is a simple proportional gain (K>0).v R(z) E(z) S+10 Controller ZOH Plant Figure 2* i)o In order to directly design a digital controller in the z-domain, the plant P(s) 6. needs to be discretised as P(z). Find the ZOH...
 D9.2 Design a state-feedback controller for the following systems. Determine the controller gains, open-loop transfer functions, and closed-loop transfer functions Use the open-loop transfer functions to obtain root locus, Bode plots, and gain and phase margins LU u=-kx + r Closed-loop poles at s --1tj 2
D9.2 Design a state-feedback controller for the following systems. Determine the controller gains, open-loop transfer functions, and closed-loop transfer functions Use the open-loop transfer functions to obtain root locus, Bode plots, and gain and phase margins LU u=-kx + r Closed-loop poles at s --1tj 2
 A standard feedback control loop is shown below: 0.125 36s213s 1 0.125 a) Determine y(t) for the open loop response (i.e. controller in 'manual' mode) to a unit step-change disturbance (3 marks) b) If G 1, derive y(t) for the closed loop response (i.e. controller in 'automatic' mode) to a unit step-change disturbance, and calculate the off-set. (4 marks) c) If Gc is to be a Pl or PID controller, use the Direct Synthesis or Internal Model Control method to...
A standard feedback control loop is shown below: 0.125 36s213s 1 0.125 a) Determine y(t) for the open loop response (i.e. controller in 'manual' mode) to a unit step-change disturbance (3 marks) b) If G 1, derive y(t) for the closed loop response (i.e. controller in 'automatic' mode) to a unit step-change disturbance, and calculate the off-set. (4 marks) c) If Gc is to be a Pl or PID controller, use the Direct Synthesis or Internal Model Control method to...
 4) A unity feedback control system shown in Figure 2 has the following controller and process with the transfer functions: m(60100c Prs(s +10(s+7.5) a) Obtain the open- and closed-loop transfer functions of the system. b) Obtain the stability conditions using the Routh-Hurwitz criterion. e) Setting by trial-and-error some values for Kp, Ki, and Ko, obtain the time response for minimum overshoot and minimum settling time by Matlab/Simulink. Y(s) R(s) E(s) Fig. 2: Unity feedback control system
4) A unity feedback...
4) A unity feedback control system shown in Figure 2 has the following controller and process with the transfer functions: m(60100c Prs(s +10(s+7.5) a) Obtain the open- and closed-loop transfer functions of the system. b) Obtain the stability conditions using the Routh-Hurwitz criterion. e) Setting by trial-and-error some values for Kp, Ki, and Ko, obtain the time response for minimum overshoot and minimum settling time by Matlab/Simulink. Y(s) R(s) E(s) Fig. 2: Unity feedback control system
4) A unity feedback...
 PD & PID controller design Consider a unity feedback system with open loop transfer function, G(s) = 20/s(s+2)(8+4). Design a PD controller so that the closed loop has a damping ratio of 0.8 and natural frequency of oscillation as 2 rad/sec. b) 100 Consider a unity feedback system with open loop transfer function, aus. Design a PID controller, so that the phase margin of (S-1) (s + 2) (s+10) the system is 45° at a frequency of 4 rad/scc and...
PD & PID controller design Consider a unity feedback system with open loop transfer function, G(s) = 20/s(s+2)(8+4). Design a PD controller so that the closed loop has a damping ratio of 0.8 and natural frequency of oscillation as 2 rad/sec. b) 100 Consider a unity feedback system with open loop transfer function, aus. Design a PID controller, so that the phase margin of (S-1) (s + 2) (s+10) the system is 45° at a frequency of 4 rad/scc and...
 Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
 A second-order process is described by its transfer function G(s) = (s+1)(843) and a PI controller by Consider feedback control with unit feedback gain as shown in Figure 1 A disturbance D(s) exists, and to achieve zero steady-state error, a small integral component is applied. Technical limitations restrict the controller gain kp to values of 0.2 or less. The goal is to examine the influence of the controller parameter k on the dynamic response. D(s) Controller Process X(s) Y(s) Figure...
A second-order process is described by its transfer function G(s) = (s+1)(843) and a PI controller by Consider feedback control with unit feedback gain as shown in Figure 1 A disturbance D(s) exists, and to achieve zero steady-state error, a small integral component is applied. Technical limitations restrict the controller gain kp to values of 0.2 or less. The goal is to examine the influence of the controller parameter k on the dynamic response. D(s) Controller Process X(s) Y(s) Figure...
 Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
 muibliam 5(20%). The closed-loop system is given below. Controller (a) (S%) Find the system transfer function and discuss the range of Ko to make the eystom stuibie assuming K (t)(S%) Find the percentage of overshoot and stendy state error to the unit ramp input as a function of your design parameter Ke assuming K4 ( d) 5%) Find hed sagn parameters Ko and Kr such that the damping ratio of the closed- lonp system is O15 and the steady state...
muibliam 5(20%). The closed-loop system is given below. Controller (a) (S%) Find the system transfer function and discuss the range of Ko to make the eystom stuibie assuming K (t)(S%) Find the percentage of overshoot and stendy state error to the unit ramp input as a function of your design parameter Ke assuming K4 ( d) 5%) Find hed sagn parameters Ko and Kr such that the damping ratio of the closed- lonp system is O15 and the steady state...
 find the following:
a)state transition matrix?
b)output as function of time?
c)design a state feedback controller to place closed loop at (-3)
and (-5)
Question (: (10 hO Considering the following system, 01x + 0 t<0 tt t20 Where x(0)-L1] , u(t)-(% ,u(t) a) Find the state transition matrix. (3 marks) b) Find the output as a function of time. (3 marks) c) Design a state feedback controller to place the closed loop poles at (-3) and (-5). (4 marks)...
find the following:
a)state transition matrix?
b)output as function of time?
c)design a state feedback controller to place closed loop at (-3)
and (-5)
Question (: (10 hO Considering the following system, 01x + 0 t<0 tt t20 Where x(0)-L1] , u(t)-(% ,u(t) a) Find the state transition matrix. (3 marks) b) Find the output as a function of time. (3 marks) c) Design a state feedback controller to place the closed loop poles at (-3) and (-5). (4 marks)...
 Give me the explanation plz
2. a) A digital controller implementation for a feedback system is shown in Figure 2 where the sampling period is T0.1 second. The plant transfer function is s +10 P(s) = and the feedback controller, K, is a simple proportional gain (K>0).v R(z) E(z) S+10 Controller ZOH Plant Figure 2* i)o In order to directly design a digital controller in the z-domain, the plant P(s) 6. needs to be discretised as P(z). Find the ZOH...
Give me the explanation plz
2. a) A digital controller implementation for a feedback system is shown in Figure 2 where the sampling period is T0.1 second. The plant transfer function is s +10 P(s) = and the feedback controller, K, is a simple proportional gain (K>0).v R(z) E(z) S+10 Controller ZOH Plant Figure 2* i)o In order to directly design a digital controller in the z-domain, the plant P(s) 6. needs to be discretised as P(z). Find the ZOH...
Most questions answered within 3 hours.
-
Accent Software faces the following conditions. All of these
support Accent’s use of a market-penetration pricing...
asked 12 minutes ago -
A mathematically inclined friend emails you the following
instructions: "Meet me in the cafeteria the first...
asked 15 minutes ago -
A monopoly sells in two countries . The demand curves in the two
countries are p1...
asked 1 hour ago -
A .15kg rubber ball is bounced off a wall. Before hitting the
wall, the ball moves...
asked 1 hour ago -
A manufacturing company preparing to build a new plant is
considering three potential locations for it....
asked 1 hour ago -
B. If compound Y has approximately the same values of solubility
in toluene as compound X,...
asked 2 hours ago -
Oscar Inc. has inventory in Japan valued at 39,051,000 Yen one
year ago. One year ago...
asked 2 hours ago -
If Canada suffered from "fundamental disequilibrium," and its
government choose not to devalue its currency, a...
asked 2 hours ago -
4. How many input & output Key Value Pairs are passed into,
and emitted out of...
asked 2 hours ago -
Why would your heart not function well if constructed of
skeletal muscle? What is the particular...
asked 2 hours ago -
Please respond to this essay question in full essay form for
Chemistry 1102 Organic and Biochemistry:...
asked 3 hours ago -
Determine the head loss and velocity of flow in a water supply main
of 15.0 cm...
asked 3 hours ago