Can anyone please help me to solve the problem. Appreciate your help. Thank you.
Homework Answers
The closed loop transfer function will be given by,

Substituting values we get the closed loop transfer function as,

(a) The above transfer function has no zeroes and there are three poles which are,

Hence the asymptotic bode plot will be of the form,

(b) Using MATLAB we get the following plots

Add Answer to:
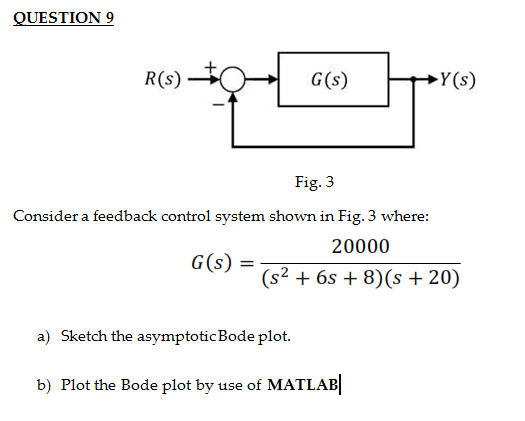
Can anyone please help me to solve the problem. Appreciate your help. Thank you. Y(s) Fig. 3 Consider a feedback control system shown in Fig. 3 where: 20000 G(s) - (s2+6s 8) (s 20) a) Sketch the asym...
consider a feedback control system shown in Fig.1, where Problem 3 Consider a feedback control system...
 consider a feedback control system shown in Fig.1, where
Problem 3 Consider a feedback control system shown in Fig. 1, where s2 +s+4 1. Is the system open-loop stable? 2. Determine the value of the proportional gain K such that the phase margin is Ap 3. What is the gain margin with this gain K? 50
consider a feedback control system shown in Fig.1, where
Problem 3 Consider a feedback control system shown in Fig. 1, where s2 +s+4 1. Is the system open-loop stable? 2. Determine the value of the proportional gain K such that the phase margin is Ap 3. What is the gain margin with this gain K? 50
QUESTION 2: Again, for the feedback control system from Question 1, Let G(S) 3 +27 s2 +218 s+504 ...
 QUESTION 2: Again, for the feedback control system from Question 1, Let G(S) 3 +27 s2 +218 s+504 s2 +6s+34 Part a) What are the poles and zeroes of G(s)? Part b) Plot the root-locus using RLOCUS.M - Refer to the MATLAB notes in the back of this handout. - Be sure to indicate the direction of "increasing K" on each branch Part c) Comment on this root-locus plot How it pertains to poles and zeros of G(s), etc. Are...
QUESTION 2: Again, for the feedback control system from Question 1, Let G(S) 3 +27 s2 +218 s+504 s2 +6s+34 Part a) What are the poles and zeroes of G(s)? Part b) Plot the root-locus using RLOCUS.M - Refer to the MATLAB notes in the back of this handout. - Be sure to indicate the direction of "increasing K" on each branch Part c) Comment on this root-locus plot How it pertains to poles and zeros of G(s), etc. Are...
Question .(20 marks) Consider a control system shown in Fig.2 has an open loop TE-G(S)H(s)- 49...
 Question .(20 marks) Consider a control system shown in Fig.2 has an open loop TE-G(S)H(s)- 49 S(S+7) A-Prove that the gain margin-infinite db at infinite rad/sec. and the phase margin 51.8 degrees at 5.5 rad/sec.? B-Sketch the polar plot? C- Sketch the Bode plot and show gain margin and phase margin D- Sketch the Nichols plot? E-Write short MATLAB program to solve a, b, C and D? Best Wishes for all Examiners
Question .(20 marks) Consider a control system shown in Fig.2 has an open loop TE-G(S)H(s)- 49 S(S+7) A-Prove that the gain margin-infinite db at infinite rad/sec. and the phase margin 51.8 degrees at 5.5 rad/sec.? B-Sketch the polar plot? C- Sketch the Bode plot and show gain margin and phase margin D- Sketch the Nichols plot? E-Write short MATLAB program to solve a, b, C and D? Best Wishes for all Examiners
Question ④ (20 marks) Consider a control system shown in Fig. I has an open loop TF-G(s) H (s)--( A-Prove that the gain margin-infinite db at infinite rad/sec. and the phase margin 62.1 degrees at...
 Question ④ (20 marks) Consider a control system shown in Fig. I has an open loop TF-G(s) H (s)--( A-Prove that the gain margin-infinite db at infinite rad/sec. and the phase margin 62.1 degrees at 2.65 rad/sec.? B-Sketch the polar plot? 15 S(S+5) C- Sketch the Bode plot and show gain margin and phase margin? D-Sketch the Nichols plot? E-Write short MATLAB program to solve a, b, C and D? Best Wishes for all, Examiners
Question ④ (20 marks) Consider...
Question ④ (20 marks) Consider a control system shown in Fig. I has an open loop TF-G(s) H (s)--( A-Prove that the gain margin-infinite db at infinite rad/sec. and the phase margin 62.1 degrees at 2.65 rad/sec.? B-Sketch the polar plot? 15 S(S+5) C- Sketch the Bode plot and show gain margin and phase margin? D-Sketch the Nichols plot? E-Write short MATLAB program to solve a, b, C and D? Best Wishes for all, Examiners
Question ④ (20 marks) Consider...
b- Consider a unity feed- back control system has (S+1 +)(S+2) (S+1-j) 3 4S2 6S +...
 b- Consider a unity feed- back control system has (S+1 +)(S+2) (S+1-j) 3 4S2 6S + 4 a-Prove that as K-8 the gain margin-7.96 db at 2.45 rad/sec. and the phase margin 44.1 degrees at 1.56 rad/sec.? b-Sketch the polar plot? c-Sketch the Bode plot? d- Sketch the Nichols plot and Show Gm and Ym on the plots? e-Write short MATLAB program to solve a, b, c and d?
b- Consider a unity feed- back control system has (S+1 +)(S+2) (S+1-j) 3 4S2 6S + 4 a-Prove that as K-8 the gain margin-7.96 db at 2.45 rad/sec. and the phase margin 44.1 degrees at 1.56 rad/sec.? b-Sketch the polar plot? c-Sketch the Bode plot? d- Sketch the Nichols plot and Show Gm and Ym on the plots? e-Write short MATLAB program to solve a, b, c and d?
1. The open loop system G()l be placed into a unity feedback system s2(s+1) as shown below. a. Sk...
 please answer all parts and show the related work. thank you!
especially the matlab parts!
1. The open loop system G()l be placed into a unity feedback system s2(s+1) as shown below. a. Sketch the Root Locus of G(s) by hand and compare your results with Matlab. Include your sketch and the Matlab plot. b. This system is unstable for all positive values of K. Explain why. c. Show with a hand sketch and Matlab plot of the root locus...
please answer all parts and show the related work. thank you!
especially the matlab parts!
1. The open loop system G()l be placed into a unity feedback system s2(s+1) as shown below. a. Sketch the Root Locus of G(s) by hand and compare your results with Matlab. Include your sketch and the Matlab plot. b. This system is unstable for all positive values of K. Explain why. c. Show with a hand sketch and Matlab plot of the root locus...
For a unity feedback system as shown in Fig. 1, where 10(92 - 2s+2) G(8) =...
 For a unity feedback system as shown in Fig. 1, where 10(92 - 2s+2) G(8) = (5+1)(+ 2s +1) the Nyquist plot is shown in Figure 2 (a) Complete the Nyquist stability analysis for the system (b) If the system becomes G(s) = - 10(32 +28+2) (8 + 1)(s2 - 2s + 1)' with the Nyquist plot shown in Figure 3, is the closed-loop system stable? Complete the Nyquist stability analysis on this system. Figure 1: Pre- Imaginary Axis Imaginary...
For a unity feedback system as shown in Fig. 1, where 10(92 - 2s+2) G(8) = (5+1)(+ 2s +1) the Nyquist plot is shown in Figure 2 (a) Complete the Nyquist stability analysis for the system (b) If the system becomes G(s) = - 10(32 +28+2) (8 + 1)(s2 - 2s + 1)' with the Nyquist plot shown in Figure 3, is the closed-loop system stable? Complete the Nyquist stability analysis on this system. Figure 1: Pre- Imaginary Axis Imaginary...
A feedback control system with adjustable gain K is shown as in Figure 4.1. Here, Q4 1 and H (s) where b 2a bs +a G(s)=...
 A feedback control system with adjustable gain K is shown as in Figure 4.1. Here, Q4 1 and H (s) where b 2a bs +a G(s)= 3(s+a) Y(s) R(s) G(s) К H(s) Figure 4.1 A feedback control system with adjustable gain Sketch Nyquist plot for G(s)H(s) for 0.9 <a < 1.1. (a) (18 marks) (b) Discuss the stability of closed-loop system with open-loop function as in (a) if K 10b (7 marks)
A feedback control system with adjustable gain K...
A feedback control system with adjustable gain K is shown as in Figure 4.1. Here, Q4 1 and H (s) where b 2a bs +a G(s)= 3(s+a) Y(s) R(s) G(s) К H(s) Figure 4.1 A feedback control system with adjustable gain Sketch Nyquist plot for G(s)H(s) for 0.9 <a < 1.1. (a) (18 marks) (b) Discuss the stability of closed-loop system with open-loop function as in (a) if K 10b (7 marks)
A feedback control system with adjustable gain K...
3. Consider a unity feedback system with G(s)=- s(s+1)(s+2) a) Sketch the bode plot and find...
 3. Consider a unity feedback system with G(s)=- s(s+1)(s+2) a) Sketch the bode plot and find the phase margin, gain crossover frequency, gain margin, and phase crossover frequency. b) Suppose G(s) is replaced with — - Kets s(s+1)(s+2) i. For the phase margin you have computed in (a), find the minimum value for t that makes the system marginally stable. Suppose t is 1 second. What is the range of K for stability? (You can use MATLAB for this part.)...
3. Consider a unity feedback system with G(s)=- s(s+1)(s+2) a) Sketch the bode plot and find the phase margin, gain crossover frequency, gain margin, and phase crossover frequency. b) Suppose G(s) is replaced with — - Kets s(s+1)(s+2) i. For the phase margin you have computed in (a), find the minimum value for t that makes the system marginally stable. Suppose t is 1 second. What is the range of K for stability? (You can use MATLAB for this part.)...
4. Consider a unity-feedback control system with the following open-loop transfer function: G(s)3 Sketch a Nyquist...
 4. Consider a unity-feedback control system with the following open-loop transfer function: G(s)3 Sketch a Nyquist plot of G(s) and examine the stability of the system.
4. Consider a unity-feedback control system with the following open-loop transfer function: G(s)3 Sketch a Nyquist plot of G(s) and examine the stability of the system.
 consider a feedback control system shown in Fig.1, where
Problem 3 Consider a feedback control system shown in Fig. 1, where s2 +s+4 1. Is the system open-loop stable? 2. Determine the value of the proportional gain K such that the phase margin is Ap 3. What is the gain margin with this gain K? 50
consider a feedback control system shown in Fig.1, where
Problem 3 Consider a feedback control system shown in Fig. 1, where s2 +s+4 1. Is the system open-loop stable? 2. Determine the value of the proportional gain K such that the phase margin is Ap 3. What is the gain margin with this gain K? 50
 QUESTION 2: Again, for the feedback control system from Question 1, Let G(S) 3 +27 s2 +218 s+504 s2 +6s+34 Part a) What are the poles and zeroes of G(s)? Part b) Plot the root-locus using RLOCUS.M - Refer to the MATLAB notes in the back of this handout. - Be sure to indicate the direction of "increasing K" on each branch Part c) Comment on this root-locus plot How it pertains to poles and zeros of G(s), etc. Are...
QUESTION 2: Again, for the feedback control system from Question 1, Let G(S) 3 +27 s2 +218 s+504 s2 +6s+34 Part a) What are the poles and zeroes of G(s)? Part b) Plot the root-locus using RLOCUS.M - Refer to the MATLAB notes in the back of this handout. - Be sure to indicate the direction of "increasing K" on each branch Part c) Comment on this root-locus plot How it pertains to poles and zeros of G(s), etc. Are...
 Question .(20 marks) Consider a control system shown in Fig.2 has an open loop TE-G(S)H(s)- 49 S(S+7) A-Prove that the gain margin-infinite db at infinite rad/sec. and the phase margin 51.8 degrees at 5.5 rad/sec.? B-Sketch the polar plot? C- Sketch the Bode plot and show gain margin and phase margin D- Sketch the Nichols plot? E-Write short MATLAB program to solve a, b, C and D? Best Wishes for all Examiners
Question .(20 marks) Consider a control system shown in Fig.2 has an open loop TE-G(S)H(s)- 49 S(S+7) A-Prove that the gain margin-infinite db at infinite rad/sec. and the phase margin 51.8 degrees at 5.5 rad/sec.? B-Sketch the polar plot? C- Sketch the Bode plot and show gain margin and phase margin D- Sketch the Nichols plot? E-Write short MATLAB program to solve a, b, C and D? Best Wishes for all Examiners
 Question ④ (20 marks) Consider a control system shown in Fig. I has an open loop TF-G(s) H (s)--( A-Prove that the gain margin-infinite db at infinite rad/sec. and the phase margin 62.1 degrees at 2.65 rad/sec.? B-Sketch the polar plot? 15 S(S+5) C- Sketch the Bode plot and show gain margin and phase margin? D-Sketch the Nichols plot? E-Write short MATLAB program to solve a, b, C and D? Best Wishes for all, Examiners
Question ④ (20 marks) Consider...
Question ④ (20 marks) Consider a control system shown in Fig. I has an open loop TF-G(s) H (s)--( A-Prove that the gain margin-infinite db at infinite rad/sec. and the phase margin 62.1 degrees at 2.65 rad/sec.? B-Sketch the polar plot? 15 S(S+5) C- Sketch the Bode plot and show gain margin and phase margin? D-Sketch the Nichols plot? E-Write short MATLAB program to solve a, b, C and D? Best Wishes for all, Examiners
Question ④ (20 marks) Consider...
 b- Consider a unity feed- back control system has (S+1 +)(S+2) (S+1-j) 3 4S2 6S + 4 a-Prove that as K-8 the gain margin-7.96 db at 2.45 rad/sec. and the phase margin 44.1 degrees at 1.56 rad/sec.? b-Sketch the polar plot? c-Sketch the Bode plot? d- Sketch the Nichols plot and Show Gm and Ym on the plots? e-Write short MATLAB program to solve a, b, c and d?
b- Consider a unity feed- back control system has (S+1 +)(S+2) (S+1-j) 3 4S2 6S + 4 a-Prove that as K-8 the gain margin-7.96 db at 2.45 rad/sec. and the phase margin 44.1 degrees at 1.56 rad/sec.? b-Sketch the polar plot? c-Sketch the Bode plot? d- Sketch the Nichols plot and Show Gm and Ym on the plots? e-Write short MATLAB program to solve a, b, c and d?
 please answer all parts and show the related work. thank you!
especially the matlab parts!
1. The open loop system G()l be placed into a unity feedback system s2(s+1) as shown below. a. Sketch the Root Locus of G(s) by hand and compare your results with Matlab. Include your sketch and the Matlab plot. b. This system is unstable for all positive values of K. Explain why. c. Show with a hand sketch and Matlab plot of the root locus...
please answer all parts and show the related work. thank you!
especially the matlab parts!
1. The open loop system G()l be placed into a unity feedback system s2(s+1) as shown below. a. Sketch the Root Locus of G(s) by hand and compare your results with Matlab. Include your sketch and the Matlab plot. b. This system is unstable for all positive values of K. Explain why. c. Show with a hand sketch and Matlab plot of the root locus...
 For a unity feedback system as shown in Fig. 1, where 10(92 - 2s+2) G(8) = (5+1)(+ 2s +1) the Nyquist plot is shown in Figure 2 (a) Complete the Nyquist stability analysis for the system (b) If the system becomes G(s) = - 10(32 +28+2) (8 + 1)(s2 - 2s + 1)' with the Nyquist plot shown in Figure 3, is the closed-loop system stable? Complete the Nyquist stability analysis on this system. Figure 1: Pre- Imaginary Axis Imaginary...
For a unity feedback system as shown in Fig. 1, where 10(92 - 2s+2) G(8) = (5+1)(+ 2s +1) the Nyquist plot is shown in Figure 2 (a) Complete the Nyquist stability analysis for the system (b) If the system becomes G(s) = - 10(32 +28+2) (8 + 1)(s2 - 2s + 1)' with the Nyquist plot shown in Figure 3, is the closed-loop system stable? Complete the Nyquist stability analysis on this system. Figure 1: Pre- Imaginary Axis Imaginary...
 A feedback control system with adjustable gain K is shown as in Figure 4.1. Here, Q4 1 and H (s) where b 2a bs +a G(s)= 3(s+a) Y(s) R(s) G(s) К H(s) Figure 4.1 A feedback control system with adjustable gain Sketch Nyquist plot for G(s)H(s) for 0.9 <a < 1.1. (a) (18 marks) (b) Discuss the stability of closed-loop system with open-loop function as in (a) if K 10b (7 marks)
A feedback control system with adjustable gain K...
A feedback control system with adjustable gain K is shown as in Figure 4.1. Here, Q4 1 and H (s) where b 2a bs +a G(s)= 3(s+a) Y(s) R(s) G(s) К H(s) Figure 4.1 A feedback control system with adjustable gain Sketch Nyquist plot for G(s)H(s) for 0.9 <a < 1.1. (a) (18 marks) (b) Discuss the stability of closed-loop system with open-loop function as in (a) if K 10b (7 marks)
A feedback control system with adjustable gain K...
 3. Consider a unity feedback system with G(s)=- s(s+1)(s+2) a) Sketch the bode plot and find the phase margin, gain crossover frequency, gain margin, and phase crossover frequency. b) Suppose G(s) is replaced with — - Kets s(s+1)(s+2) i. For the phase margin you have computed in (a), find the minimum value for t that makes the system marginally stable. Suppose t is 1 second. What is the range of K for stability? (You can use MATLAB for this part.)...
3. Consider a unity feedback system with G(s)=- s(s+1)(s+2) a) Sketch the bode plot and find the phase margin, gain crossover frequency, gain margin, and phase crossover frequency. b) Suppose G(s) is replaced with — - Kets s(s+1)(s+2) i. For the phase margin you have computed in (a), find the minimum value for t that makes the system marginally stable. Suppose t is 1 second. What is the range of K for stability? (You can use MATLAB for this part.)...
 4. Consider a unity-feedback control system with the following open-loop transfer function: G(s)3 Sketch a Nyquist plot of G(s) and examine the stability of the system.
4. Consider a unity-feedback control system with the following open-loop transfer function: G(s)3 Sketch a Nyquist plot of G(s) and examine the stability of the system.
Most questions answered within 3 hours.
-
Briefly discuss the following statements:
2.1 A partner never has the right to claim compensation for...
asked 3 seconds from now -
If a bond has an annual probability of default of 6%, 10% and
12% in years...
asked 8 minutes ago -
Let X be normally distributed with mean μ = 10 and standard
deviation σ = 6....
asked 13 minutes ago -
You're examining some of the tiny printing on one of the newer
twenty-dollar bills. A 1.5...
asked 18 minutes ago -
Discuss several common sources of secondary data coming from
government sources.
asked 20 minutes ago -
This is a basic java program where you convert units using only
loops, control statements and...
asked 21 minutes ago -
A sample survey at a supermarket showed that 204 of 300 shoppers
regularly use cents-off coupons....
asked 1 hour ago -
1. Find the area under the standard normal curve that lies
outside the interval between z=...
asked 38 minutes ago -
In ________ mode, the interpreter reads the contents of a file
that contains Python statements and...
asked 53 minutes ago -
1.
The second-order rate constant for self-reaction of hydroxyl
radicals
2 OH → H2O + O...
asked 43 minutes ago -
What is the most important factor leading to improved resource
efficiency over the long run?
asked 39 minutes ago -
Defend the effectiveness of teamwork in an organization.
(Use no more than 30 words)
asked 41 minutes ago