
Homework Answers
Add Answer to:
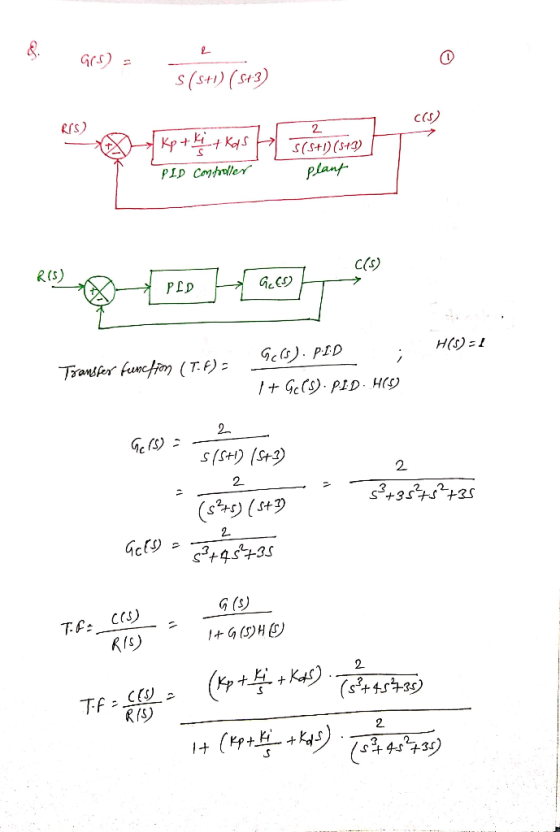
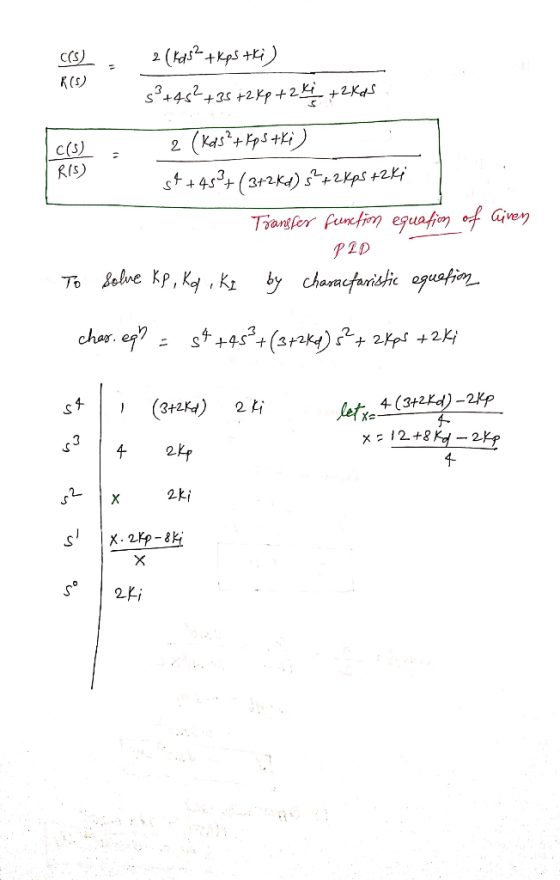
Given the control system shown in Figure P7.I6 where the plant transfer function Gis) is given by лис, 2.0 Ds + 3) ss design a PID controller for this system. Cis) 2.0 sis + 1)(s+3 R(s) Plant PID...
7.16C). Given the control system shown in Figure P7.16 where the plant transfer function G(o) is given by 2.0 design a PID controller for this system. Cis) R(s) 2.0 sis+ 1)(s+3) Plant PID control...
 7.16C). Given the control system shown in Figure P7.16 where the plant transfer function G(o) is given by 2.0 design a PID controller for this system. Cis) R(s) 2.0 sis+ 1)(s+3) Plant PID controller FIGURE P7.16
7.16C). Given the control system shown in Figure P7.16 where the plant transfer function G(o) is given by 2.0 design a PID controller for this system. Cis) R(s) 2.0 sis+ 1)(s+3) Plant PID controller FIGURE P7.16
7.16C). Given the control system shown in Figure P7.16 where the plant transfer function G(o) is given by 2.0 design a PID controller for this system. Cis) R(s) 2.0 sis+ 1)(s+3) Plant PID controller FIGURE P7.16
7.16C). Given the control system shown in Figure P7.16 where the plant transfer function G(o) is given by 2.0 design a PID controller for this system. Cis) R(s) 2.0 sis+ 1)(s+3) Plant PID controller FIGURE P7.16
Implement a PID controller to control the transfer function shown below. The PID controller and plant...
 Implement a PID controller to control the transfer function
shown below. The PID controller and plant transfer function should
be in a closed feedback loop. Assume the feedback loop has a Gain
of 5 associated with it i.e. . The Transfer function of a PID
controller is also given below. Start by:
6. Implement a PID controller to control the transfer function shown below. The PID feedback loop has a Gain of 5 associated with it i.e. (HS) = 5)....
Implement a PID controller to control the transfer function
shown below. The PID controller and plant transfer function should
be in a closed feedback loop. Assume the feedback loop has a Gain
of 5 associated with it i.e. . The Transfer function of a PID
controller is also given below. Start by:
6. Implement a PID controller to control the transfer function shown below. The PID feedback loop has a Gain of 5 associated with it i.e. (HS) = 5)....
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller trans...
 Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
Q.4 A position control system is shown in Figure Q4. Assume that K(s) = K, the plant 50 s(0.2s +1) transfer function is given by G(s) s02s y(t) r(t) Figure Q4: Feedback control system. (a) Design a l...
 Q.4 A position control system is shown in Figure Q4. Assume that K(s) = K, the plant 50 s(0.2s +1) transfer function is given by G(s) s02s y(t) r(t) Figure Q4: Feedback control system. (a) Design a lead compensator so that the closed-loop system satisfies the following specifications (i) The steady-state error to a unit-ramp input is less than 1/200 (ii) The unit-step response has an overshoot of less than 16% Ts +1 Hint: Compensator, Dc(s)=aTs+ 1, wm-T (18 marks)...
Q.4 A position control system is shown in Figure Q4. Assume that K(s) = K, the plant 50 s(0.2s +1) transfer function is given by G(s) s02s y(t) r(t) Figure Q4: Feedback control system. (a) Design a lead compensator so that the closed-loop system satisfies the following specifications (i) The steady-state error to a unit-ramp input is less than 1/200 (ii) The unit-step response has an overshoot of less than 16% Ts +1 Hint: Compensator, Dc(s)=aTs+ 1, wm-T (18 marks)...
Consider the feedback sy PID COntroller Plant R(S) Y(s) the closed-loop transfer function T(s) = Y...
 Consider the feedback sy PID COntroller Plant R(S) Y(s) the closed-loop transfer function T(s) = Y controller (Kp Find er p 1, Ks K ) and show that the system is marginally stable with two imaginary roots. (s)/R(s) with no sabl thosed-loop transfer function T(s) Y (S/R(s) with the (three- term) PID controller added to stabilize the system. suming that Kd 4 and K, -100, find the values (range) of Kp that will stabilize the system.
Consider the feedback sy PID COntroller Plant R(S) Y(s) the closed-loop transfer function T(s) = Y controller (Kp Find er p 1, Ks K ) and show that the system is marginally stable with two imaginary roots. (s)/R(s) with no sabl thosed-loop transfer function T(s) Y (S/R(s) with the (three- term) PID controller added to stabilize the system. suming that Kd 4 and K, -100, find the values (range) of Kp that will stabilize the system.
Give me the explanation plz 2. a) A digital controller implementation for a feedback system is shown in Figure 2 where the sampling period is T0.1 second. The plant transfer function is s +10 P(s) =...
 Give me the explanation plz
2. a) A digital controller implementation for a feedback system is shown in Figure 2 where the sampling period is T0.1 second. The plant transfer function is s +10 P(s) = and the feedback controller, K, is a simple proportional gain (K>0).v R(z) E(z) S+10 Controller ZOH Plant Figure 2* i)o In order to directly design a digital controller in the z-domain, the plant P(s) 6. needs to be discretised as P(z). Find the ZOH...
Give me the explanation plz
2. a) A digital controller implementation for a feedback system is shown in Figure 2 where the sampling period is T0.1 second. The plant transfer function is s +10 P(s) = and the feedback controller, K, is a simple proportional gain (K>0).v R(z) E(z) S+10 Controller ZOH Plant Figure 2* i)o In order to directly design a digital controller in the z-domain, the plant P(s) 6. needs to be discretised as P(z). Find the ZOH...
Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5...
 Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
C(8) for the system shown in Figure 1. R(S Find the equivalent transfer function, Geg (s)...
 C(8) for the system shown in Figure 1. R(S Find the equivalent transfer function, Geg (s) 1 Cix) Figure 1. Block diagram 2s+1 s(5s+6Ge(s) = and Figure 2 shows a closed-loop transfer function, where G(s) 2. proper H(s) K+s. Find the overall closed-loop transfer function and express is as rational function. C(s) Ea (s) Controller R(s) +/ Plant G(s) Ge (s) Feedback H(s) Figure 2. Closed loop transfer function Construct the actuation Error Transfer Function associated with the system shown...
C(8) for the system shown in Figure 1. R(S Find the equivalent transfer function, Geg (s) 1 Cix) Figure 1. Block diagram 2s+1 s(5s+6Ge(s) = and Figure 2 shows a closed-loop transfer function, where G(s) 2. proper H(s) K+s. Find the overall closed-loop transfer function and express is as rational function. C(s) Ea (s) Controller R(s) +/ Plant G(s) Ge (s) Feedback H(s) Figure 2. Closed loop transfer function Construct the actuation Error Transfer Function associated with the system shown...
System dynamics and control course. Use only “MATLAB “to solve this. Need a pro to help Let a system have plant transfer function (00.2) s3 +22s 156s+232 Design a PID controller such that the cl...
 System dynamics and control course.
Use only “MATLAB “to solve this.
Need a pro to help
Let a system have plant transfer function (00.2) s3 +22s 156s+232 Design a PID controller such that the closed-loop rise time is less than 0.5 seconds, the overshoot is less than 10%, and the steady-state error is zero for a step command.
Let a system have plant transfer function (00.2) s3 +22s 156s+232 Design a PID controller such that the closed-loop rise time is...
System dynamics and control course.
Use only “MATLAB “to solve this.
Need a pro to help
Let a system have plant transfer function (00.2) s3 +22s 156s+232 Design a PID controller such that the closed-loop rise time is less than 0.5 seconds, the overshoot is less than 10%, and the steady-state error is zero for a step command.
Let a system have plant transfer function (00.2) s3 +22s 156s+232 Design a PID controller such that the closed-loop rise time is...
PD & PID controller design Consider a unity feedback system with open loop transfer function, G(s)...
 PD & PID controller design Consider a unity feedback system with open loop transfer function, G(s) = 20/s(s+2)(8+4). Design a PD controller so that the closed loop has a damping ratio of 0.8 and natural frequency of oscillation as 2 rad/sec. b) 100 Consider a unity feedback system with open loop transfer function, aus. Design a PID controller, so that the phase margin of (S-1) (s + 2) (s+10) the system is 45° at a frequency of 4 rad/scc and...
PD & PID controller design Consider a unity feedback system with open loop transfer function, G(s) = 20/s(s+2)(8+4). Design a PD controller so that the closed loop has a damping ratio of 0.8 and natural frequency of oscillation as 2 rad/sec. b) 100 Consider a unity feedback system with open loop transfer function, aus. Design a PID controller, so that the phase margin of (S-1) (s + 2) (s+10) the system is 45° at a frequency of 4 rad/scc and...
 7.16C). Given the control system shown in Figure P7.16 where the plant transfer function G(o) is given by 2.0 design a PID controller for this system. Cis) R(s) 2.0 sis+ 1)(s+3) Plant PID controller FIGURE P7.16
7.16C). Given the control system shown in Figure P7.16 where the plant transfer function G(o) is given by 2.0 design a PID controller for this system. Cis) R(s) 2.0 sis+ 1)(s+3) Plant PID controller FIGURE P7.16
7.16C). Given the control system shown in Figure P7.16 where the plant transfer function G(o) is given by 2.0 design a PID controller for this system. Cis) R(s) 2.0 sis+ 1)(s+3) Plant PID controller FIGURE P7.16
7.16C). Given the control system shown in Figure P7.16 where the plant transfer function G(o) is given by 2.0 design a PID controller for this system. Cis) R(s) 2.0 sis+ 1)(s+3) Plant PID controller FIGURE P7.16
 Implement a PID controller to control the transfer function
shown below. The PID controller and plant transfer function should
be in a closed feedback loop. Assume the feedback loop has a Gain
of 5 associated with it i.e. . The Transfer function of a PID
controller is also given below. Start by:
6. Implement a PID controller to control the transfer function shown below. The PID feedback loop has a Gain of 5 associated with it i.e. (HS) = 5)....
Implement a PID controller to control the transfer function
shown below. The PID controller and plant transfer function should
be in a closed feedback loop. Assume the feedback loop has a Gain
of 5 associated with it i.e. . The Transfer function of a PID
controller is also given below. Start by:
6. Implement a PID controller to control the transfer function shown below. The PID feedback loop has a Gain of 5 associated with it i.e. (HS) = 5)....
 Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
 Q.4 A position control system is shown in Figure Q4. Assume that K(s) = K, the plant 50 s(0.2s +1) transfer function is given by G(s) s02s y(t) r(t) Figure Q4: Feedback control system. (a) Design a lead compensator so that the closed-loop system satisfies the following specifications (i) The steady-state error to a unit-ramp input is less than 1/200 (ii) The unit-step response has an overshoot of less than 16% Ts +1 Hint: Compensator, Dc(s)=aTs+ 1, wm-T (18 marks)...
Q.4 A position control system is shown in Figure Q4. Assume that K(s) = K, the plant 50 s(0.2s +1) transfer function is given by G(s) s02s y(t) r(t) Figure Q4: Feedback control system. (a) Design a lead compensator so that the closed-loop system satisfies the following specifications (i) The steady-state error to a unit-ramp input is less than 1/200 (ii) The unit-step response has an overshoot of less than 16% Ts +1 Hint: Compensator, Dc(s)=aTs+ 1, wm-T (18 marks)...
 Consider the feedback sy PID COntroller Plant R(S) Y(s) the closed-loop transfer function T(s) = Y controller (Kp Find er p 1, Ks K ) and show that the system is marginally stable with two imaginary roots. (s)/R(s) with no sabl thosed-loop transfer function T(s) Y (S/R(s) with the (three- term) PID controller added to stabilize the system. suming that Kd 4 and K, -100, find the values (range) of Kp that will stabilize the system.
Consider the feedback sy PID COntroller Plant R(S) Y(s) the closed-loop transfer function T(s) = Y controller (Kp Find er p 1, Ks K ) and show that the system is marginally stable with two imaginary roots. (s)/R(s) with no sabl thosed-loop transfer function T(s) Y (S/R(s) with the (three- term) PID controller added to stabilize the system. suming that Kd 4 and K, -100, find the values (range) of Kp that will stabilize the system.
 Give me the explanation plz
2. a) A digital controller implementation for a feedback system is shown in Figure 2 where the sampling period is T0.1 second. The plant transfer function is s +10 P(s) = and the feedback controller, K, is a simple proportional gain (K>0).v R(z) E(z) S+10 Controller ZOH Plant Figure 2* i)o In order to directly design a digital controller in the z-domain, the plant P(s) 6. needs to be discretised as P(z). Find the ZOH...
Give me the explanation plz
2. a) A digital controller implementation for a feedback system is shown in Figure 2 where the sampling period is T0.1 second. The plant transfer function is s +10 P(s) = and the feedback controller, K, is a simple proportional gain (K>0).v R(z) E(z) S+10 Controller ZOH Plant Figure 2* i)o In order to directly design a digital controller in the z-domain, the plant P(s) 6. needs to be discretised as P(z). Find the ZOH...
 Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
 C(8) for the system shown in Figure 1. R(S Find the equivalent transfer function, Geg (s) 1 Cix) Figure 1. Block diagram 2s+1 s(5s+6Ge(s) = and Figure 2 shows a closed-loop transfer function, where G(s) 2. proper H(s) K+s. Find the overall closed-loop transfer function and express is as rational function. C(s) Ea (s) Controller R(s) +/ Plant G(s) Ge (s) Feedback H(s) Figure 2. Closed loop transfer function Construct the actuation Error Transfer Function associated with the system shown...
C(8) for the system shown in Figure 1. R(S Find the equivalent transfer function, Geg (s) 1 Cix) Figure 1. Block diagram 2s+1 s(5s+6Ge(s) = and Figure 2 shows a closed-loop transfer function, where G(s) 2. proper H(s) K+s. Find the overall closed-loop transfer function and express is as rational function. C(s) Ea (s) Controller R(s) +/ Plant G(s) Ge (s) Feedback H(s) Figure 2. Closed loop transfer function Construct the actuation Error Transfer Function associated with the system shown...
 System dynamics and control course.
Use only “MATLAB “to solve this.
Need a pro to help
Let a system have plant transfer function (00.2) s3 +22s 156s+232 Design a PID controller such that the closed-loop rise time is less than 0.5 seconds, the overshoot is less than 10%, and the steady-state error is zero for a step command.
Let a system have plant transfer function (00.2) s3 +22s 156s+232 Design a PID controller such that the closed-loop rise time is...
System dynamics and control course.
Use only “MATLAB “to solve this.
Need a pro to help
Let a system have plant transfer function (00.2) s3 +22s 156s+232 Design a PID controller such that the closed-loop rise time is less than 0.5 seconds, the overshoot is less than 10%, and the steady-state error is zero for a step command.
Let a system have plant transfer function (00.2) s3 +22s 156s+232 Design a PID controller such that the closed-loop rise time is...
 PD & PID controller design Consider a unity feedback system with open loop transfer function, G(s) = 20/s(s+2)(8+4). Design a PD controller so that the closed loop has a damping ratio of 0.8 and natural frequency of oscillation as 2 rad/sec. b) 100 Consider a unity feedback system with open loop transfer function, aus. Design a PID controller, so that the phase margin of (S-1) (s + 2) (s+10) the system is 45° at a frequency of 4 rad/scc and...
PD & PID controller design Consider a unity feedback system with open loop transfer function, G(s) = 20/s(s+2)(8+4). Design a PD controller so that the closed loop has a damping ratio of 0.8 and natural frequency of oscillation as 2 rad/sec. b) 100 Consider a unity feedback system with open loop transfer function, aus. Design a PID controller, so that the phase margin of (S-1) (s + 2) (s+10) the system is 45° at a frequency of 4 rad/scc and...
Most questions answered within 3 hours.
-
what process occurs to form microspores and megaspores in flowering
plants?
asked 1 minute from now -
A block is hung by a string from the inside roof of a van. When
the...
asked 4 minutes ago -
Do you think companies should not go for long term debt in their
capital structure to...
asked 12 minutes ago -
I create an address book where the user enters the name, phone
and email in the...
asked 18 minutes ago -
The production capacity for acrylonitrile
(C3H3N) in the United States exceeds 2
million pounds per year....
asked 26 minutes ago -
explain and comment out your answer
43. How many address lines are required to address a...
asked 32 minutes ago -
A sample of 45 observations is selected from a normal
population. The sample mean is 49,...
asked 47 minutes ago -
A construction company is planning to bid on a building
contract. The bid costs the company...
asked 44 minutes ago -
A firm operating in a purely competitive environment is faced
with a market price of $250....
asked 51 minutes ago -
•Let’s say someone claims the average population size is
600 feet squared and the housing authority...
asked 59 minutes ago -
Cynaide is a deadly poison that blocks the last step in the
electron transport chain of...
asked 1 hour ago -
Your friend tells you that there is a vending machine on campus
that dispenses M&M packs...
asked 1 hour ago