Consider the transfer function of a DC motor given by G(s) = 1 / s(s+2)

Homework Answers

Add Answer to:
Consider the transfer function of a DC motor given by G(s) = 1 / s(s+2) 3. Consider the transfer function of a DC motor...
Q.4 A position control system is shown in Figure Q4. Assume that K(s) = K, the plant 50 s(0.2s +1) transfer function is given by G(s) s02s y(t) r(t) Figure Q4: Feedback control system. (a) Design a l...
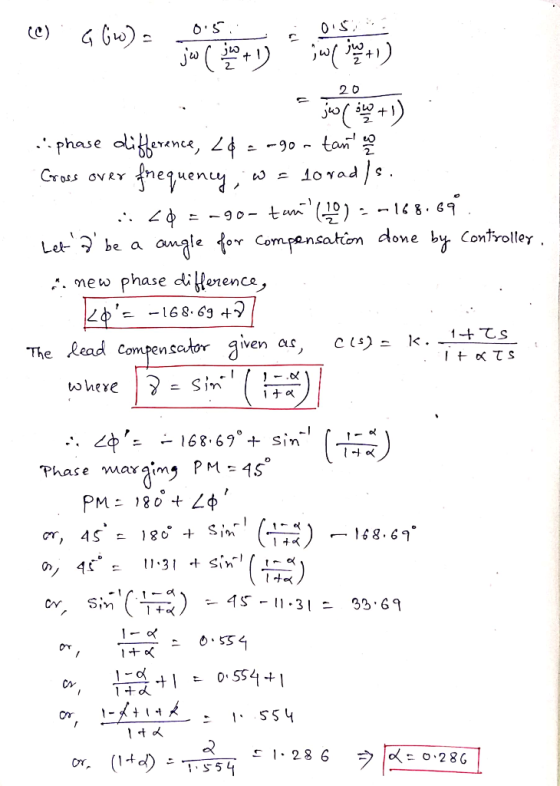
 Q.4 A position control system is shown in Figure Q4. Assume that K(s) = K, the plant 50 s(0.2s +1) transfer function is given by G(s) s02s y(t) r(t) Figure Q4: Feedback control system. (a) Design a lead compensator so that the closed-loop system satisfies the following specifications (i) The steady-state error to a unit-ramp input is less than 1/200 (ii) The unit-step response has an overshoot of less than 16% Ts +1 Hint: Compensator, Dc(s)=aTs+ 1, wm-T (18 marks)...
Q.4 A position control system is shown in Figure Q4. Assume that K(s) = K, the plant 50 s(0.2s +1) transfer function is given by G(s) s02s y(t) r(t) Figure Q4: Feedback control system. (a) Design a lead compensator so that the closed-loop system satisfies the following specifications (i) The steady-state error to a unit-ramp input is less than 1/200 (ii) The unit-step response has an overshoot of less than 16% Ts +1 Hint: Compensator, Dc(s)=aTs+ 1, wm-T (18 marks)...
Consider the system shown as below. Draw a Bode diagram of the open-loop transfer function G(s).
 1 Consider the system shown as below. Draw a Bode diagram of the open-loop transfer function G(s). Determine the phase margin, gain-crossover frequency, gain margin and phase-crossover frequency, (Sketch the bode diagram by hand) 2 Consider the system shown as below. Use MATLAB to draw a bode diagram of the open-loop transfer function G(s). Show the gain-crossover frequency and phase-crossover frequency in the Bode diagram and determine the phase margin and gain margin. 3. Consider the system shown as below. Design a...
1 Consider the system shown as below. Draw a Bode diagram of the open-loop transfer function G(s). Determine the phase margin, gain-crossover frequency, gain margin and phase-crossover frequency, (Sketch the bode diagram by hand) 2 Consider the system shown as below. Use MATLAB to draw a bode diagram of the open-loop transfer function G(s). Show the gain-crossover frequency and phase-crossover frequency in the Bode diagram and determine the phase margin and gain margin. 3. Consider the system shown as below. Design a...
Question 3 (10 +10+10+15 45 marks) E(s) C(s) R(s) Figure 3: Unity feedback control system for Question 3 For the unity...
 Question 3 (10 +10+10+15 45 marks) E(s) C(s) R(s) Figure 3: Unity feedback control system for Question 3 For the unity feedback control system shown in Figure 3, 100 G(S) (s+2)(+10) Page 3 of 7 NEE3201 Examination Paper CRICOS Provider No: 00124k a) Determine the phase margin, the gain crossover frequency, the gain margin, the phase crossover frequency of the system when Gc(s)-1, 10 marks) b) Design a proportional controller Gc(s)-K so that a phase margin of 50° is achieved....
Question 3 (10 +10+10+15 45 marks) E(s) C(s) R(s) Figure 3: Unity feedback control system for Question 3 For the unity feedback control system shown in Figure 3, 100 G(S) (s+2)(+10) Page 3 of 7 NEE3201 Examination Paper CRICOS Provider No: 00124k a) Determine the phase margin, the gain crossover frequency, the gain margin, the phase crossover frequency of the system when Gc(s)-1, 10 marks) b) Design a proportional controller Gc(s)-K so that a phase margin of 50° is achieved....
Consider a system modelled by means of the following transfer function 10 G(s) s(s +1)(s +10)...
 Consider a system modelled by means of the following transfer function 10 G(s) s(s +1)(s +10) Given the standar negative feedback control structure, and the Bode plot of G(s): 1. Obtain (if possible) a lead compensator controller (C(s) Kc1+ts) that satisfies that the corresponding steady state error with respect to the ramp input is and that the overshoot is not greater than 15 per cent 2. Obtain (if possible) a lead compensator that satisfies that the correspond- ing steady state...
Consider a system modelled by means of the following transfer function 10 G(s) s(s +1)(s +10) Given the standar negative feedback control structure, and the Bode plot of G(s): 1. Obtain (if possible) a lead compensator controller (C(s) Kc1+ts) that satisfies that the corresponding steady state error with respect to the ramp input is and that the overshoot is not greater than 15 per cent 2. Obtain (if possible) a lead compensator that satisfies that the correspond- ing steady state...
Problem 2: (20 points) A DC Motor with negligible armature inductance is used in a position...
 Problem 2: (20 points) A DC Motor with negligible armature inductance is used in a position control applications. The open-loop transfer function is 50 G(s) = s(s/5+1) Using a Bode Plot of the system and Frequency Domain Methods, design an analog compensator to meet the following specifications: The bandwidth of the compensated system is no less than that of the uncompensated system. • The step response overshoot is less than 20%. • The steady-state error to a unit-ramp input is...
Problem 2: (20 points) A DC Motor with negligible armature inductance is used in a position control applications. The open-loop transfer function is 50 G(s) = s(s/5+1) Using a Bode Plot of the system and Frequency Domain Methods, design an analog compensator to meet the following specifications: The bandwidth of the compensated system is no less than that of the uncompensated system. • The step response overshoot is less than 20%. • The steady-state error to a unit-ramp input is...
5. Consider the feedback system in Figure 4 where! G(s) = 26+10% Figure 4 The Bode...
 5. Consider the feedback system in Figure 4 where! G(s) = 26+10% Figure 4 The Bode plot of G is shown in Figure 5. Boda Diagram Magnitude (dB) -100- -156 -135 -root -225 10 Frequency radici Figure 5: Bode plot of G (a) [2 marks] Find the phase margin, gain margin and gain crossover frequency (approximate as needed) for the case when C(s) = 1. PM = GM = wc = You are asked to design a feedback controller C(s)...
5. Consider the feedback system in Figure 4 where! G(s) = 26+10% Figure 4 The Bode plot of G is shown in Figure 5. Boda Diagram Magnitude (dB) -100- -156 -135 -root -225 10 Frequency radici Figure 5: Bode plot of G (a) [2 marks] Find the phase margin, gain margin and gain crossover frequency (approximate as needed) for the case when C(s) = 1. PM = GM = wc = You are asked to design a feedback controller C(s)...
3. Consider a unity feedback system with G(s)=- s(s+1)(s+2) a) Sketch the bode plot and find...
 3. Consider a unity feedback system with G(s)=- s(s+1)(s+2) a) Sketch the bode plot and find the phase margin, gain crossover frequency, gain margin, and phase crossover frequency. b) Suppose G(s) is replaced with — - Kets s(s+1)(s+2) i. For the phase margin you have computed in (a), find the minimum value for t that makes the system marginally stable. Suppose t is 1 second. What is the range of K for stability? (You can use MATLAB for this part.)...
3. Consider a unity feedback system with G(s)=- s(s+1)(s+2) a) Sketch the bode plot and find the phase margin, gain crossover frequency, gain margin, and phase crossover frequency. b) Suppose G(s) is replaced with — - Kets s(s+1)(s+2) i. For the phase margin you have computed in (a), find the minimum value for t that makes the system marginally stable. Suppose t is 1 second. What is the range of K for stability? (You can use MATLAB for this part.)...
Q4. (10 points) Consider the DC motor that you have used in running your experiments. Application...
 Q4. (10 points) Consider the DC motor that you have used in running your experiments. Application of a proportional-velocity (PV) compensator with a proportional control gain kp and a velocity control gain ky to the motor produces the transfer function for position control to be 01(s) Kk a) Assuming nominal plant values of K-1.7 and 0.03, find the controller gain values kp and ky necessary to obtain a desired peak time and peak overshoot of tp 0.3 s and PO-:...
Q4. (10 points) Consider the DC motor that you have used in running your experiments. Application of a proportional-velocity (PV) compensator with a proportional control gain kp and a velocity control gain ky to the motor produces the transfer function for position control to be 01(s) Kk a) Assuming nominal plant values of K-1.7 and 0.03, find the controller gain values kp and ky necessary to obtain a desired peak time and peak overshoot of tp 0.3 s and PO-:...
The transfer function of the given physical system is 2500 Gp(s)-T-1000 Part 3 1. Frequency response (a) Draw the bode...
 The transfer function of the given physical system is 2500 Gp(s)-T-1000 Part 3 1. Frequency response (a) Draw the bode plot of open-loop transfer function when K (b) Use bode plot of open-loop transfer function to determine the type of system (do not use transfer function) (c) For what input the system will have constant steady-state error (d) for the unit input in item (c) calculate the constant steady-state error.(Use bode plot to calculate the error.) (e) Design a lead...
The transfer function of the given physical system is 2500 Gp(s)-T-1000 Part 3 1. Frequency response (a) Draw the bode plot of open-loop transfer function when K (b) Use bode plot of open-loop transfer function to determine the type of system (do not use transfer function) (c) For what input the system will have constant steady-state error (d) for the unit input in item (c) calculate the constant steady-state error.(Use bode plot to calculate the error.) (e) Design a lead...
1. Consider a unity feedback control system with the transfer function G(s) = 1/[s(s+ 2)] in...
1. Consider a unity feedback control system with the transfer function G(s) = 1/[s(s+ 2)] in the forward path. (a) Design a proportional controller that yields a stable system with percent overshoot less that 5% for the step input (b) Find settling time and peak time of the closed-loop system designed in part (a); (c) Design a PD compensator that reduces the settling time computed in (b) by a factor of 4 while keeping the percent overshoot less that 5%...
 Q.4 A position control system is shown in Figure Q4. Assume that K(s) = K, the plant 50 s(0.2s +1) transfer function is given by G(s) s02s y(t) r(t) Figure Q4: Feedback control system. (a) Design a lead compensator so that the closed-loop system satisfies the following specifications (i) The steady-state error to a unit-ramp input is less than 1/200 (ii) The unit-step response has an overshoot of less than 16% Ts +1 Hint: Compensator, Dc(s)=aTs+ 1, wm-T (18 marks)...
Q.4 A position control system is shown in Figure Q4. Assume that K(s) = K, the plant 50 s(0.2s +1) transfer function is given by G(s) s02s y(t) r(t) Figure Q4: Feedback control system. (a) Design a lead compensator so that the closed-loop system satisfies the following specifications (i) The steady-state error to a unit-ramp input is less than 1/200 (ii) The unit-step response has an overshoot of less than 16% Ts +1 Hint: Compensator, Dc(s)=aTs+ 1, wm-T (18 marks)...
 Question 3 (10 +10+10+15 45 marks) E(s) C(s) R(s) Figure 3: Unity feedback control system for Question 3 For the unity feedback control system shown in Figure 3, 100 G(S) (s+2)(+10) Page 3 of 7 NEE3201 Examination Paper CRICOS Provider No: 00124k a) Determine the phase margin, the gain crossover frequency, the gain margin, the phase crossover frequency of the system when Gc(s)-1, 10 marks) b) Design a proportional controller Gc(s)-K so that a phase margin of 50° is achieved....
Question 3 (10 +10+10+15 45 marks) E(s) C(s) R(s) Figure 3: Unity feedback control system for Question 3 For the unity feedback control system shown in Figure 3, 100 G(S) (s+2)(+10) Page 3 of 7 NEE3201 Examination Paper CRICOS Provider No: 00124k a) Determine the phase margin, the gain crossover frequency, the gain margin, the phase crossover frequency of the system when Gc(s)-1, 10 marks) b) Design a proportional controller Gc(s)-K so that a phase margin of 50° is achieved....
 Consider a system modelled by means of the following transfer function 10 G(s) s(s +1)(s +10) Given the standar negative feedback control structure, and the Bode plot of G(s): 1. Obtain (if possible) a lead compensator controller (C(s) Kc1+ts) that satisfies that the corresponding steady state error with respect to the ramp input is and that the overshoot is not greater than 15 per cent 2. Obtain (if possible) a lead compensator that satisfies that the correspond- ing steady state...
Consider a system modelled by means of the following transfer function 10 G(s) s(s +1)(s +10) Given the standar negative feedback control structure, and the Bode plot of G(s): 1. Obtain (if possible) a lead compensator controller (C(s) Kc1+ts) that satisfies that the corresponding steady state error with respect to the ramp input is and that the overshoot is not greater than 15 per cent 2. Obtain (if possible) a lead compensator that satisfies that the correspond- ing steady state...
 Problem 2: (20 points) A DC Motor with negligible armature inductance is used in a position control applications. The open-loop transfer function is 50 G(s) = s(s/5+1) Using a Bode Plot of the system and Frequency Domain Methods, design an analog compensator to meet the following specifications: The bandwidth of the compensated system is no less than that of the uncompensated system. • The step response overshoot is less than 20%. • The steady-state error to a unit-ramp input is...
Problem 2: (20 points) A DC Motor with negligible armature inductance is used in a position control applications. The open-loop transfer function is 50 G(s) = s(s/5+1) Using a Bode Plot of the system and Frequency Domain Methods, design an analog compensator to meet the following specifications: The bandwidth of the compensated system is no less than that of the uncompensated system. • The step response overshoot is less than 20%. • The steady-state error to a unit-ramp input is...
 5. Consider the feedback system in Figure 4 where! G(s) = 26+10% Figure 4 The Bode plot of G is shown in Figure 5. Boda Diagram Magnitude (dB) -100- -156 -135 -root -225 10 Frequency radici Figure 5: Bode plot of G (a) [2 marks] Find the phase margin, gain margin and gain crossover frequency (approximate as needed) for the case when C(s) = 1. PM = GM = wc = You are asked to design a feedback controller C(s)...
5. Consider the feedback system in Figure 4 where! G(s) = 26+10% Figure 4 The Bode plot of G is shown in Figure 5. Boda Diagram Magnitude (dB) -100- -156 -135 -root -225 10 Frequency radici Figure 5: Bode plot of G (a) [2 marks] Find the phase margin, gain margin and gain crossover frequency (approximate as needed) for the case when C(s) = 1. PM = GM = wc = You are asked to design a feedback controller C(s)...
 3. Consider a unity feedback system with G(s)=- s(s+1)(s+2) a) Sketch the bode plot and find the phase margin, gain crossover frequency, gain margin, and phase crossover frequency. b) Suppose G(s) is replaced with — - Kets s(s+1)(s+2) i. For the phase margin you have computed in (a), find the minimum value for t that makes the system marginally stable. Suppose t is 1 second. What is the range of K for stability? (You can use MATLAB for this part.)...
3. Consider a unity feedback system with G(s)=- s(s+1)(s+2) a) Sketch the bode plot and find the phase margin, gain crossover frequency, gain margin, and phase crossover frequency. b) Suppose G(s) is replaced with — - Kets s(s+1)(s+2) i. For the phase margin you have computed in (a), find the minimum value for t that makes the system marginally stable. Suppose t is 1 second. What is the range of K for stability? (You can use MATLAB for this part.)...
 Q4. (10 points) Consider the DC motor that you have used in running your experiments. Application of a proportional-velocity (PV) compensator with a proportional control gain kp and a velocity control gain ky to the motor produces the transfer function for position control to be 01(s) Kk a) Assuming nominal plant values of K-1.7 and 0.03, find the controller gain values kp and ky necessary to obtain a desired peak time and peak overshoot of tp 0.3 s and PO-:...
Q4. (10 points) Consider the DC motor that you have used in running your experiments. Application of a proportional-velocity (PV) compensator with a proportional control gain kp and a velocity control gain ky to the motor produces the transfer function for position control to be 01(s) Kk a) Assuming nominal plant values of K-1.7 and 0.03, find the controller gain values kp and ky necessary to obtain a desired peak time and peak overshoot of tp 0.3 s and PO-:...
 The transfer function of the given physical system is 2500 Gp(s)-T-1000 Part 3 1. Frequency response (a) Draw the bode plot of open-loop transfer function when K (b) Use bode plot of open-loop transfer function to determine the type of system (do not use transfer function) (c) For what input the system will have constant steady-state error (d) for the unit input in item (c) calculate the constant steady-state error.(Use bode plot to calculate the error.) (e) Design a lead...
The transfer function of the given physical system is 2500 Gp(s)-T-1000 Part 3 1. Frequency response (a) Draw the bode plot of open-loop transfer function when K (b) Use bode plot of open-loop transfer function to determine the type of system (do not use transfer function) (c) For what input the system will have constant steady-state error (d) for the unit input in item (c) calculate the constant steady-state error.(Use bode plot to calculate the error.) (e) Design a lead...
Most questions answered within 3 hours.
-
A 8.15- g bullet from a 9-mm pistol has a velocity of 366.0 m/s.
It strikes...
asked 36 minutes ago -
The outstanding bonds of Alpha Extracts have a yield to maturity
of 7.4 percent and a...
asked 33 minutes ago -
The Problem: The Case of the Harmonizing Vacations
Your CEO is exploring partnering with a European...
asked 1 hour ago -
A chemical equation is balanced by adding coefficients in front
of some formulas so that the...
asked 1 hour ago -
From the literature (reference your sources): What are the
lattice parameters of calcite and aragonite? Why...
asked 2 hours ago -
Your system is rejecting the question am asking which is
preceded by a case study. It...
asked 2 hours ago -
3. On January 2, 2000, Larry creates a trust with himself as
trustee. Larry as trustee...
asked 2 hours ago -
A member of the volleyball team spikes the ball. During this
process, she changes the velocity...
asked 2 hours ago -
Are adult gamers less likely to use a gaming console (Xbox,
PlayStation, Wii, etc...) than teen...
asked 3 hours ago -
The University of
Texas recently reported that 43% of college students aged 18-24
would spend their...
asked 3 hours ago -
The length of stay at a specific emergency department in
Phoenix, Arizona, in 2009 had a...
asked 3 hours ago -
. Please give the mechanism for this type of problem. Step by
Step
The toxin that...
asked 3 hours ago