


Homework Answers






Add Answer to:
Show the movement of the masses with time by creating a MATLAB
GUIDE file that takes...
Use MATLAB Simulink Use a similar way to this: (the picture from the left is cut...
 Use MATLAB Simulink
Use a similar way to this: (the picture from the left is cut a
little)
Use MATLAB Simulink to build the block diagram for the system M m x2 +kı (x2-u) + Kz (x2-x1) + k3 (x2-x) = 0 m_x3 + k} (x3 – x2) = 0 kz (x2 – x1) = c(*. - ů) YA 1417 ДА | AA
Use MATLAB Simulink
Use a similar way to this: (the picture from the left is cut a
little)
Use MATLAB Simulink to build the block diagram for the system M m x2 +kı (x2-u) + Kz (x2-x1) + k3 (x2-x) = 0 m_x3 + k} (x3 – x2) = 0 kz (x2 – x1) = c(*. - ů) YA 1417 ДА | AA
Mechanical vibration subject 3. a. Consider the system of Figure 3. If C1 = C2 =...
 Mechanical vibration subject
3. a. Consider the system of Figure 3. If C1 = C2 = C3 = 0, develops the equation of motion and predict the mass and stiffness matrices. Note that setting k3 = 0 in your solution should result in the stiffness matrix given by [ky + kz -k2 kz b. constructs the characteristics equation from Question 3(a) for the case m1 = 9 kg, m2 = 1 kg, k1 = 24 N/m, k2 = 3 N/m,...
Mechanical vibration subject
3. a. Consider the system of Figure 3. If C1 = C2 = C3 = 0, develops the equation of motion and predict the mass and stiffness matrices. Note that setting k3 = 0 in your solution should result in the stiffness matrix given by [ky + kz -k2 kz b. constructs the characteristics equation from Question 3(a) for the case m1 = 9 kg, m2 = 1 kg, k1 = 24 N/m, k2 = 3 N/m,...
4.9. Draw a Simulink diagram to represent the system shown in Example 4.3. Plot x, and...
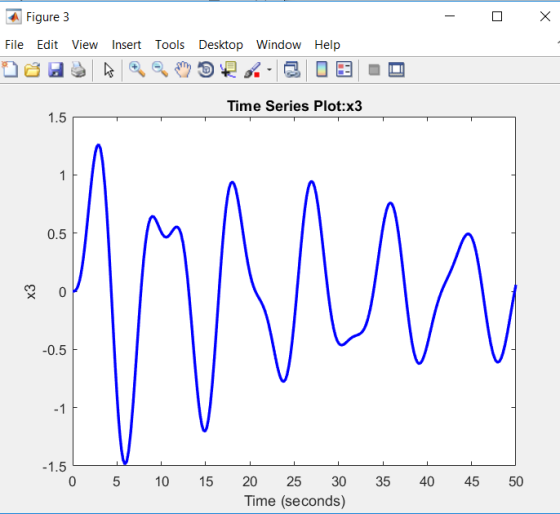
 4.9. Draw a Simulink diagram to represent the system shown in Example 4.3. Plot x, and x2 for the first 50 seconds when the applied force fal increases from 0 to 10 N at t = 1 s. The parameter values are M1 = M2 = 10 kg, B = 20 Ns/m, and Ki = K2 = 10 N/m. *4.10. Draw a Simulink diagram to represent the system shown in Example 4.4. Plot the first 10 seconds of the response...
4.9. Draw a Simulink diagram to represent the system shown in Example 4.3. Plot x, and x2 for the first 50 seconds when the applied force fal increases from 0 to 10 N at t = 1 s. The parameter values are M1 = M2 = 10 kg, B = 20 Ns/m, and Ki = K2 = 10 N/m. *4.10. Draw a Simulink diagram to represent the system shown in Example 4.4. Plot the first 10 seconds of the response...
We consider here, the two masses m1 and m2 connected this time by springs of stiffnesses...
 We consider here, the two masses m1 and m2 connected this time
by springs of stiffnesses k1, k2 and k3 as shown in the figure
below. We denote x1 (t) and x2 (t) as the movement of each of the 2
masses relative to its position of equilibrium static.
1) Prove that the differential equation whose unknown is the displacement is written in the following form:
2) Deduce the second differential equation whose unknown is the
displacement
3) Determine the...
We consider here, the two masses m1 and m2 connected this time
by springs of stiffnesses k1, k2 and k3 as shown in the figure
below. We denote x1 (t) and x2 (t) as the movement of each of the 2
masses relative to its position of equilibrium static.
1) Prove that the differential equation whose unknown is the displacement is written in the following form:
2) Deduce the second differential equation whose unknown is the
displacement
3) Determine the...
We consider here, the two masses m1 and m2 connected this time by springs of stiffnesses...
 We consider here, the two masses m1 and m2
connected this time by springs of stiffnesses k1,
k2 and k3 as shown in the figure below. We
denote by x1(t) and x2(t) the movement of
each of the 2 masses relative to its position of equilibrium
static.
1. Prove that the differential equation whose unknown is the
displacement x1(t) is written in the following form: (3
points)
2. Deduce the second differential equation whose unknown is the
displacement x2(t) (3...
We consider here, the two masses m1 and m2
connected this time by springs of stiffnesses k1,
k2 and k3 as shown in the figure below. We
denote by x1(t) and x2(t) the movement of
each of the 2 masses relative to its position of equilibrium
static.
1. Prove that the differential equation whose unknown is the
displacement x1(t) is written in the following form: (3
points)
2. Deduce the second differential equation whose unknown is the
displacement x2(t) (3...
Differentiel equations We consider here, the two masses m1 and m2 connected this time by springs...
 Differentiel equations
We consider here, the two masses m1 and m2 connected this time
by springs of stiffnesses k1, k2 and k3 as indicated in the figure
below. We denote by x1 (t) and x2 (t) the movement of each of the 2
masses relative to its static equilibrium position.
1. Prove that the differential equation whose unknown is the
displacement x1 (t) is written in the following form:
2. Deduce the second differential equation whose unknown is the
displacement...
Differentiel equations
We consider here, the two masses m1 and m2 connected this time
by springs of stiffnesses k1, k2 and k3 as indicated in the figure
below. We denote by x1 (t) and x2 (t) the movement of each of the 2
masses relative to its static equilibrium position.
1. Prove that the differential equation whose unknown is the
displacement x1 (t) is written in the following form:
2. Deduce the second differential equation whose unknown is the
displacement...
Here we consider the two masses m1 and m2 connected this time by springs of stiffnesses...
 Here we consider the two masses m1 and m2 connected this time by
springs of stiffnesses k1, k2 and k3 as shown in the figure below.
The movement of each of the 2 masses relative to its position of
static equilibrium is designated by x1(t) and x2(t).
1. Demonstrate that the differential equation whose unknown is
the displacement x1(t) is written as follows:
2. Determine the second differential equation whose unknown is
the displacement x2(t).
3. Determine the free oscillatory...
Here we consider the two masses m1 and m2 connected this time by
springs of stiffnesses k1, k2 and k3 as shown in the figure below.
The movement of each of the 2 masses relative to its position of
static equilibrium is designated by x1(t) and x2(t).
1. Demonstrate that the differential equation whose unknown is
the displacement x1(t) is written as follows:
2. Determine the second differential equation whose unknown is
the displacement x2(t).
3. Determine the free oscillatory...
 Use MATLAB Simulink
Use a similar way to this: (the picture from the left is cut a
little)
Use MATLAB Simulink to build the block diagram for the system M m x2 +kı (x2-u) + Kz (x2-x1) + k3 (x2-x) = 0 m_x3 + k} (x3 – x2) = 0 kz (x2 – x1) = c(*. - ů) YA 1417 ДА | AA
Use MATLAB Simulink
Use a similar way to this: (the picture from the left is cut a
little)
Use MATLAB Simulink to build the block diagram for the system M m x2 +kı (x2-u) + Kz (x2-x1) + k3 (x2-x) = 0 m_x3 + k} (x3 – x2) = 0 kz (x2 – x1) = c(*. - ů) YA 1417 ДА | AA
 Mechanical vibration subject
3. a. Consider the system of Figure 3. If C1 = C2 = C3 = 0, develops the equation of motion and predict the mass and stiffness matrices. Note that setting k3 = 0 in your solution should result in the stiffness matrix given by [ky + kz -k2 kz b. constructs the characteristics equation from Question 3(a) for the case m1 = 9 kg, m2 = 1 kg, k1 = 24 N/m, k2 = 3 N/m,...
Mechanical vibration subject
3. a. Consider the system of Figure 3. If C1 = C2 = C3 = 0, develops the equation of motion and predict the mass and stiffness matrices. Note that setting k3 = 0 in your solution should result in the stiffness matrix given by [ky + kz -k2 kz b. constructs the characteristics equation from Question 3(a) for the case m1 = 9 kg, m2 = 1 kg, k1 = 24 N/m, k2 = 3 N/m,...
 4.9. Draw a Simulink diagram to represent the system shown in Example 4.3. Plot x, and x2 for the first 50 seconds when the applied force fal increases from 0 to 10 N at t = 1 s. The parameter values are M1 = M2 = 10 kg, B = 20 Ns/m, and Ki = K2 = 10 N/m. *4.10. Draw a Simulink diagram to represent the system shown in Example 4.4. Plot the first 10 seconds of the response...
4.9. Draw a Simulink diagram to represent the system shown in Example 4.3. Plot x, and x2 for the first 50 seconds when the applied force fal increases from 0 to 10 N at t = 1 s. The parameter values are M1 = M2 = 10 kg, B = 20 Ns/m, and Ki = K2 = 10 N/m. *4.10. Draw a Simulink diagram to represent the system shown in Example 4.4. Plot the first 10 seconds of the response...
 We consider here, the two masses m1 and m2 connected this time
by springs of stiffnesses k1, k2 and k3 as shown in the figure
below. We denote x1 (t) and x2 (t) as the movement of each of the 2
masses relative to its position of equilibrium static.
1) Prove that the differential equation whose unknown is the displacement is written in the following form:
2) Deduce the second differential equation whose unknown is the
displacement
3) Determine the...
We consider here, the two masses m1 and m2 connected this time
by springs of stiffnesses k1, k2 and k3 as shown in the figure
below. We denote x1 (t) and x2 (t) as the movement of each of the 2
masses relative to its position of equilibrium static.
1) Prove that the differential equation whose unknown is the displacement is written in the following form:
2) Deduce the second differential equation whose unknown is the
displacement
3) Determine the...
 We consider here, the two masses m1 and m2
connected this time by springs of stiffnesses k1,
k2 and k3 as shown in the figure below. We
denote by x1(t) and x2(t) the movement of
each of the 2 masses relative to its position of equilibrium
static.
1. Prove that the differential equation whose unknown is the
displacement x1(t) is written in the following form: (3
points)
2. Deduce the second differential equation whose unknown is the
displacement x2(t) (3...
We consider here, the two masses m1 and m2
connected this time by springs of stiffnesses k1,
k2 and k3 as shown in the figure below. We
denote by x1(t) and x2(t) the movement of
each of the 2 masses relative to its position of equilibrium
static.
1. Prove that the differential equation whose unknown is the
displacement x1(t) is written in the following form: (3
points)
2. Deduce the second differential equation whose unknown is the
displacement x2(t) (3...
 Differentiel equations
We consider here, the two masses m1 and m2 connected this time
by springs of stiffnesses k1, k2 and k3 as indicated in the figure
below. We denote by x1 (t) and x2 (t) the movement of each of the 2
masses relative to its static equilibrium position.
1. Prove that the differential equation whose unknown is the
displacement x1 (t) is written in the following form:
2. Deduce the second differential equation whose unknown is the
displacement...
Differentiel equations
We consider here, the two masses m1 and m2 connected this time
by springs of stiffnesses k1, k2 and k3 as indicated in the figure
below. We denote by x1 (t) and x2 (t) the movement of each of the 2
masses relative to its static equilibrium position.
1. Prove that the differential equation whose unknown is the
displacement x1 (t) is written in the following form:
2. Deduce the second differential equation whose unknown is the
displacement...
 Here we consider the two masses m1 and m2 connected this time by
springs of stiffnesses k1, k2 and k3 as shown in the figure below.
The movement of each of the 2 masses relative to its position of
static equilibrium is designated by x1(t) and x2(t).
1. Demonstrate that the differential equation whose unknown is
the displacement x1(t) is written as follows:
2. Determine the second differential equation whose unknown is
the displacement x2(t).
3. Determine the free oscillatory...
Here we consider the two masses m1 and m2 connected this time by
springs of stiffnesses k1, k2 and k3 as shown in the figure below.
The movement of each of the 2 masses relative to its position of
static equilibrium is designated by x1(t) and x2(t).
1. Demonstrate that the differential equation whose unknown is
the displacement x1(t) is written as follows:
2. Determine the second differential equation whose unknown is
the displacement x2(t).
3. Determine the free oscillatory...
Most questions answered within 3 hours.
-
You are considering the purchase of a share of Edie's common
stock. You expect to sell...
asked 4 minutes ago -
Using the TI-84 calculator, find the area under the standard
normal curve that lies outside the...
asked 2 minutes ago -
Assembly Programming
INCLUDE Irvine32.inc
Make a program that takes a string and a word as inputs...
asked 12 minutes ago -
Can I get a C++ code and output for this program using classes
instead of using...
asked 17 minutes ago -
A 4.0 L flask containing chlorine gas is connected to an
evacuated 3.0 L flask. If...
asked 28 minutes ago -
The number of years of education of self-employed individuals in
the United States has a population...
asked 15 minutes ago -
Write an essay containing your thoughts on
whether corporations should be limited in the amount of...
asked 29 minutes ago -
Given the following two sequences x (n)=[3 , 11,7 ,0 ,−1, 4 ,2
],−3≤n≤ 3 ;...
asked 29 minutes ago -
What is the minimal sample size needed for a 95% confidence
interval to have a maximal...
asked 30 minutes ago -
1. Methods of collecting data - Experiments and direct
observation
In each of the following situations,...
asked 44 minutes ago -
Each protein is composed of a maximum of ____________ different
amino acids in varying numbers and...
asked 1 hour ago -
One member in the comp set that did not have supply, demand, and
revenue data. What...
asked 39 minutes ago