
Homework Answers

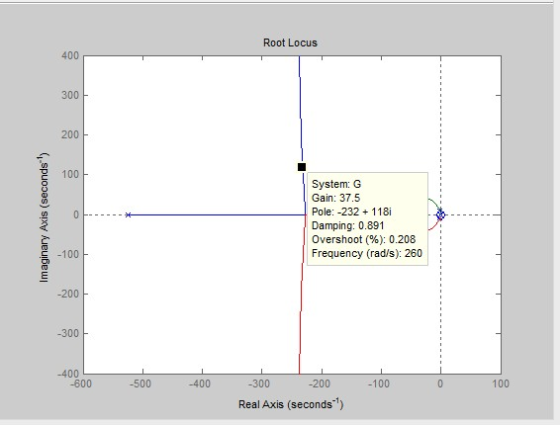
From the rootlocus plot at gain 37.5375 ,there is a dominant pole , since gain of the compensator calculated at dominant pole location.
So the dominant pole location is -232+117i shown below
MATLAB CODE:
clc;
clear all;
close all;
num1=[37.5375 1726.725 1689.1875];%coffients of the numarator
polynamial of compensator
den1=[1 525.0325 17.0625];%coffients of the denominator polynamial
of compensator
d=tf(num1,den1);% transfer function of compensator
num2=[68];%coffients of the numarator polynamial of
plant(system)
den2=[1 4 68];%coffients of the denominator polynamial of
plant(system)
gp=tf(num2,den2);% transfer function of plant(system)
G=d*gp;%over all transfer openloop function
figure(1)
%plotting the root locus of the system
rlocus(G)
Solution to (b)

MATLAB CODE:
clc;
clear all;
close all;
num1=[37.5375 1726.725 1689.1875];%coffients of the numarator
polynamial of compensator
den1=[1 525.0325 17.0625];%coffients of the denominator polynamial
of compensator
d=tf(num1,den1);% transfer function of compensator
num2=[68];%coffients of the numarator polynamial of
plant(system)
den2=[1 4 68];%coffients of the denominator polynamial of
plant(system)
gp=tf(num2,den2);% transfer function of plant(system)
G=d*gp;%over all transfer openloop function
figure(2)
%plotting step response of the system
step(T)
Solution to(c)
Result are given below
S =
RiseTime: 0.0835 sec
SettlingTime: 3.1334 sec
SettlingMin: 0.6328 sec
SettlingMax: 1.1858 sec
Overshoot: 19.7744
Undershoot: 0
Peak: 1.1858
PeakTime: 0.1697 sec
MATLAB CODE:
clc;
clear all;
close all;
num1=[37.5375 1726.725 1689.1875];%coffients of the numarator
polynamial of compensator
den1=[1 525.0325 17.0625];%coffients of the denominator polynamial
of compensator
d=tf(num1,den1);% transfer function of compensator
num2=[68];%coffients of the numarator polynamial of
plant(system)
den2=[1 4 68];%coffients of the denominator polynamial of
plant(system)
gp=tf(num2,den2);% transfer function of plant(system)
G=d*gp;%over all transfer openloop function
T=feedback(G,1);%finding over all closed loop transfer
function
%finding the parameters of the system(rise time,settling
time,etc)
S=stepinfo(T)
Thankyou
Add Answer to:
3.) The designs in parts 1.) and 2.) where found to require an actuator signal that...
Control and System Matlab and Simulink
 Design of Lead Compensator With Matlab...G(s) = 9/(s^2+0.5s) and Gc(s) = 1Transfer Function, maximum overshoot...DESIGN of a LEAD COMPENSATOR with MATLABFor the figure below, G(s)=9 / s(s+0.5)a) For the compensator Gc(s)=1 Obtain- Transfer function,- Maximum overshoot and settling time for unit-step input- Drawi. unit step-response curve in MATLAB.ii. unit ramp-response curve in MATLAB.iii. Root- locus curve in MATLAB- Obtain steady state error for unit-ramp inputb) Design a lead compensator Gc(s) to shift the poles at new locations of s₁=-4+j4 and...
Design of Lead Compensator With Matlab...G(s) = 9/(s^2+0.5s) and Gc(s) = 1Transfer Function, maximum overshoot...DESIGN of a LEAD COMPENSATOR with MATLABFor the figure below, G(s)=9 / s(s+0.5)a) For the compensator Gc(s)=1 Obtain- Transfer function,- Maximum overshoot and settling time for unit-step input- Drawi. unit step-response curve in MATLAB.ii. unit ramp-response curve in MATLAB.iii. Root- locus curve in MATLAB- Obtain steady state error for unit-ramp inputb) Design a lead compensator Gc(s) to shift the poles at new locations of s₁=-4+j4 and...
Questions 14-17: For the control system shown below Design the compensator so that the unit-step response...
 Questions 14-17: For the control system shown below Design the compensator so that the unit-step response has a settling-time ofless then twe seconds, rise-time of less th 025seconds, and overshoot ofless than 29%1, adion maximum value ofthe actuator signal ) must be kept under five14) Indicate the allowable region of the complex plane for the closed-loop poles 15) Deterine K and a, the answers are nos unique). 16.) Use Matlab to plot the step-response of the control system using your...
Questions 14-17: For the control system shown below Design the compensator so that the unit-step response has a settling-time ofless then twe seconds, rise-time of less th 025seconds, and overshoot ofless than 29%1, adion maximum value ofthe actuator signal ) must be kept under five14) Indicate the allowable region of the complex plane for the closed-loop poles 15) Deterine K and a, the answers are nos unique). 16.) Use Matlab to plot the step-response of the control system using your...
Problem 2 Wis) R(s) U(s) Gol (s) D a (s) E(s) H(s) Given a system as in the diagram above, use MATLAB to solve the problems: Assume we want the closed-loop system rise time to be t, 0.18 sec S + Z H(...
 Problem 2 Wis) R(s) U(s) Gol (s) D a (s) E(s) H(s) Given a system as in the diagram above, use MATLAB to solve the problems: Assume we want the closed-loop system rise time to be t, 0.18 sec S + Z H(s) 1 Gpl)s(s+)et s(s 1) s + p a) Assume W(s)-0. Draw the root locus of the system assuming compensator consists only of the adjustable gain parameter K, i.e. Dct (s) Determine the approximate range of values of...
Problem 2 Wis) R(s) U(s) Gol (s) D a (s) E(s) H(s) Given a system as in the diagram above, use MATLAB to solve the problems: Assume we want the closed-loop system rise time to be t, 0.18 sec S + Z H(s) 1 Gpl)s(s+)et s(s 1) s + p a) Assume W(s)-0. Draw the root locus of the system assuming compensator consists only of the adjustable gain parameter K, i.e. Dct (s) Determine the approximate range of values of...
Lag Compensator Design Using Root-Locus 2. Consider the unity feedback system in Figure 1 for G(s...
 Lag Compensator Design Using Root-Locus 2. Consider the unity feedback system in Figure 1 for G(s)- s(s+3(s6) Design a lag compensation to meet the following specifications The step response settling time is to be less than 5 sec. . The step response overshoot is to be less than 17% . The steady-state error to a unit ramp input must not exceed 10%. Dynamic specifications (overshoot and settling time) can be met using proportional feedback, but a lag compensator is needed...
Lag Compensator Design Using Root-Locus 2. Consider the unity feedback system in Figure 1 for G(s)- s(s+3(s6) Design a lag compensation to meet the following specifications The step response settling time is to be less than 5 sec. . The step response overshoot is to be less than 17% . The steady-state error to a unit ramp input must not exceed 10%. Dynamic specifications (overshoot and settling time) can be met using proportional feedback, but a lag compensator is needed...
1. Using the MATLAB rltool command (or rlocus and rlocfind), plot the K > 0 root...
 1. Using the MATLAB rltool command (or rlocus and rlocfind), plot the K > 0 root locus for What is the value of the largest damping ra- 2+2s+1 s(s120)7,7 -2,12). 1 + KL(s) = 0, where L(s) = tio associated with the pair of complex poles? At which value of K is it achieved? Turn in a printout of your plot showing the location of the poles on the damping ratio line that you found. 2. Suppose the unity feedback...
1. Using the MATLAB rltool command (or rlocus and rlocfind), plot the K > 0 root locus for What is the value of the largest damping ra- 2+2s+1 s(s120)7,7 -2,12). 1 + KL(s) = 0, where L(s) = tio associated with the pair of complex poles? At which value of K is it achieved? Turn in a printout of your plot showing the location of the poles on the damping ratio line that you found. 2. Suppose the unity feedback...
1 CONTROL SYSTEM ANALYSIS & DESIGN Spring 2019 HW 7 Due 4/4/2019, Thursday, 11:59pm 1. Design...
 1 CONTROL SYSTEM ANALYSIS & DESIGN Spring 2019 HW 7 Due 4/4/2019, Thursday, 11:59pm 1. Design a lead compensator for the closed-loop (CL) system whose open loop transfer function is given below. Design objectives: reduce the time constant by 50% while maintaining the same value of the damping ratio for the dominant poles. Please note that H(s)-1. Please use the method based on root locus plot. G(s) 2 [s(s+2)] Please include detailed step Obtain the location of the desired dominant...
1 CONTROL SYSTEM ANALYSIS & DESIGN Spring 2019 HW 7 Due 4/4/2019, Thursday, 11:59pm 1. Design a lead compensator for the closed-loop (CL) system whose open loop transfer function is given below. Design objectives: reduce the time constant by 50% while maintaining the same value of the damping ratio for the dominant poles. Please note that H(s)-1. Please use the method based on root locus plot. G(s) 2 [s(s+2)] Please include detailed step Obtain the location of the desired dominant...
A system having an open loop transfer function of G(S) = K10/(S+2)(3+1) has a root locus...
 A system having an open loop transfer function of G(S) = K10/(S+2)(3+1) has a root locus plot as shown below. The location of the roots for a system gain of K= 0.248 is show on the plot. At this location the system has a damping factor of 0.708 and a settling time of 4/1.5 = 2.67 seconds. A lead compensator is to be used to improve the transient response. (Note that nothing is plotted on the graph except for that...
A system having an open loop transfer function of G(S) = K10/(S+2)(3+1) has a root locus plot as shown below. The location of the roots for a system gain of K= 0.248 is show on the plot. At this location the system has a damping factor of 0.708 and a settling time of 4/1.5 = 2.67 seconds. A lead compensator is to be used to improve the transient response. (Note that nothing is plotted on the graph except for that...
Problem 2 Consider the following feedback system: where Design a lead compensator C s such that,...
 Problem 2 Consider the following feedback system: where Design a lead compensator C s such that, for a step response it yields %10 overshoot with threefold reduction in settling time. Show your work, clearly identity and explain the choice of poles, zeroes and gain of the compensator C(s). Use Matlab rltool.
Problem 2 Consider the following feedback system: where Design a lead compensator C s such that, for a step response it yields %10 overshoot with threefold reduction in settling time. Show your work, clearly identity and explain the choice of poles, zeroes and gain of the compensator C(s). Use Matlab rltool.
1. Consider a transfer function of a system 25 s? + 4s + 25 a) Simulation...
 1. Consider a transfer function of a system 25 s? + 4s + 25 a) Simulation i. Using any simulation software package, plot the poles on the s-plane. ii. Using unit step input, plot the transient response when there is no additional third pole to the system. iii. Using unit step input, plot the transient response when there is an additional third pole occur at -200, -20, -10, and -2. Plot them in a single graph. Normalize all the plots...
1. Consider a transfer function of a system 25 s? + 4s + 25 a) Simulation i. Using any simulation software package, plot the poles on the s-plane. ii. Using unit step input, plot the transient response when there is no additional third pole to the system. iii. Using unit step input, plot the transient response when there is an additional third pole occur at -200, -20, -10, and -2. Plot them in a single graph. Normalize all the plots...
3. Consider the tilt control block diagram shown below R(s) DesiredG(s) 12 s(s+10)(s+70) Y(s) Til...
 3. Consider the tilt control block diagram shown below R(s) DesiredG(s) 12 s(s+10)(s+70) Y(s) Tilt tilt Design specifications require an overshoot of less than 5% and a settling time of less than 0.6 seconds. (a) Use MATLAB to sketch the root locus (rlocus command) with a proportional controller and use the root locus to determine a value for K (if any) that will satisfy the design requirements (b) Design a lead compensator Ge(s) to satisfy the design specifications. You can...
3. Consider the tilt control block diagram shown below R(s) DesiredG(s) 12 s(s+10)(s+70) Y(s) Tilt tilt Design specifications require an overshoot of less than 5% and a settling time of less than 0.6 seconds. (a) Use MATLAB to sketch the root locus (rlocus command) with a proportional controller and use the root locus to determine a value for K (if any) that will satisfy the design requirements (b) Design a lead compensator Ge(s) to satisfy the design specifications. You can...
 Questions 14-17: For the control system shown below Design the compensator so that the unit-step response has a settling-time ofless then twe seconds, rise-time of less th 025seconds, and overshoot ofless than 29%1, adion maximum value ofthe actuator signal ) must be kept under five14) Indicate the allowable region of the complex plane for the closed-loop poles 15) Deterine K and a, the answers are nos unique). 16.) Use Matlab to plot the step-response of the control system using your...
Questions 14-17: For the control system shown below Design the compensator so that the unit-step response has a settling-time ofless then twe seconds, rise-time of less th 025seconds, and overshoot ofless than 29%1, adion maximum value ofthe actuator signal ) must be kept under five14) Indicate the allowable region of the complex plane for the closed-loop poles 15) Deterine K and a, the answers are nos unique). 16.) Use Matlab to plot the step-response of the control system using your...
 Problem 2 Wis) R(s) U(s) Gol (s) D a (s) E(s) H(s) Given a system as in the diagram above, use MATLAB to solve the problems: Assume we want the closed-loop system rise time to be t, 0.18 sec S + Z H(s) 1 Gpl)s(s+)et s(s 1) s + p a) Assume W(s)-0. Draw the root locus of the system assuming compensator consists only of the adjustable gain parameter K, i.e. Dct (s) Determine the approximate range of values of...
Problem 2 Wis) R(s) U(s) Gol (s) D a (s) E(s) H(s) Given a system as in the diagram above, use MATLAB to solve the problems: Assume we want the closed-loop system rise time to be t, 0.18 sec S + Z H(s) 1 Gpl)s(s+)et s(s 1) s + p a) Assume W(s)-0. Draw the root locus of the system assuming compensator consists only of the adjustable gain parameter K, i.e. Dct (s) Determine the approximate range of values of...
 Lag Compensator Design Using Root-Locus 2. Consider the unity feedback system in Figure 1 for G(s)- s(s+3(s6) Design a lag compensation to meet the following specifications The step response settling time is to be less than 5 sec. . The step response overshoot is to be less than 17% . The steady-state error to a unit ramp input must not exceed 10%. Dynamic specifications (overshoot and settling time) can be met using proportional feedback, but a lag compensator is needed...
Lag Compensator Design Using Root-Locus 2. Consider the unity feedback system in Figure 1 for G(s)- s(s+3(s6) Design a lag compensation to meet the following specifications The step response settling time is to be less than 5 sec. . The step response overshoot is to be less than 17% . The steady-state error to a unit ramp input must not exceed 10%. Dynamic specifications (overshoot and settling time) can be met using proportional feedback, but a lag compensator is needed...
 1. Using the MATLAB rltool command (or rlocus and rlocfind), plot the K > 0 root locus for What is the value of the largest damping ra- 2+2s+1 s(s120)7,7 -2,12). 1 + KL(s) = 0, where L(s) = tio associated with the pair of complex poles? At which value of K is it achieved? Turn in a printout of your plot showing the location of the poles on the damping ratio line that you found. 2. Suppose the unity feedback...
1. Using the MATLAB rltool command (or rlocus and rlocfind), plot the K > 0 root locus for What is the value of the largest damping ra- 2+2s+1 s(s120)7,7 -2,12). 1 + KL(s) = 0, where L(s) = tio associated with the pair of complex poles? At which value of K is it achieved? Turn in a printout of your plot showing the location of the poles on the damping ratio line that you found. 2. Suppose the unity feedback...
 1 CONTROL SYSTEM ANALYSIS & DESIGN Spring 2019 HW 7 Due 4/4/2019, Thursday, 11:59pm 1. Design a lead compensator for the closed-loop (CL) system whose open loop transfer function is given below. Design objectives: reduce the time constant by 50% while maintaining the same value of the damping ratio for the dominant poles. Please note that H(s)-1. Please use the method based on root locus plot. G(s) 2 [s(s+2)] Please include detailed step Obtain the location of the desired dominant...
1 CONTROL SYSTEM ANALYSIS & DESIGN Spring 2019 HW 7 Due 4/4/2019, Thursday, 11:59pm 1. Design a lead compensator for the closed-loop (CL) system whose open loop transfer function is given below. Design objectives: reduce the time constant by 50% while maintaining the same value of the damping ratio for the dominant poles. Please note that H(s)-1. Please use the method based on root locus plot. G(s) 2 [s(s+2)] Please include detailed step Obtain the location of the desired dominant...
 A system having an open loop transfer function of G(S) = K10/(S+2)(3+1) has a root locus plot as shown below. The location of the roots for a system gain of K= 0.248 is show on the plot. At this location the system has a damping factor of 0.708 and a settling time of 4/1.5 = 2.67 seconds. A lead compensator is to be used to improve the transient response. (Note that nothing is plotted on the graph except for that...
A system having an open loop transfer function of G(S) = K10/(S+2)(3+1) has a root locus plot as shown below. The location of the roots for a system gain of K= 0.248 is show on the plot. At this location the system has a damping factor of 0.708 and a settling time of 4/1.5 = 2.67 seconds. A lead compensator is to be used to improve the transient response. (Note that nothing is plotted on the graph except for that...
 Problem 2 Consider the following feedback system: where Design a lead compensator C s such that, for a step response it yields %10 overshoot with threefold reduction in settling time. Show your work, clearly identity and explain the choice of poles, zeroes and gain of the compensator C(s). Use Matlab rltool.
Problem 2 Consider the following feedback system: where Design a lead compensator C s such that, for a step response it yields %10 overshoot with threefold reduction in settling time. Show your work, clearly identity and explain the choice of poles, zeroes and gain of the compensator C(s). Use Matlab rltool.
 1. Consider a transfer function of a system 25 s? + 4s + 25 a) Simulation i. Using any simulation software package, plot the poles on the s-plane. ii. Using unit step input, plot the transient response when there is no additional third pole to the system. iii. Using unit step input, plot the transient response when there is an additional third pole occur at -200, -20, -10, and -2. Plot them in a single graph. Normalize all the plots...
1. Consider a transfer function of a system 25 s? + 4s + 25 a) Simulation i. Using any simulation software package, plot the poles on the s-plane. ii. Using unit step input, plot the transient response when there is no additional third pole to the system. iii. Using unit step input, plot the transient response when there is an additional third pole occur at -200, -20, -10, and -2. Plot them in a single graph. Normalize all the plots...
 3. Consider the tilt control block diagram shown below R(s) DesiredG(s) 12 s(s+10)(s+70) Y(s) Tilt tilt Design specifications require an overshoot of less than 5% and a settling time of less than 0.6 seconds. (a) Use MATLAB to sketch the root locus (rlocus command) with a proportional controller and use the root locus to determine a value for K (if any) that will satisfy the design requirements (b) Design a lead compensator Ge(s) to satisfy the design specifications. You can...
3. Consider the tilt control block diagram shown below R(s) DesiredG(s) 12 s(s+10)(s+70) Y(s) Tilt tilt Design specifications require an overshoot of less than 5% and a settling time of less than 0.6 seconds. (a) Use MATLAB to sketch the root locus (rlocus command) with a proportional controller and use the root locus to determine a value for K (if any) that will satisfy the design requirements (b) Design a lead compensator Ge(s) to satisfy the design specifications. You can...
Most questions answered within 3 hours.
-
1.Write an inspiring vision statement for an organization where
you work or have worked. If the...
asked 48 seconds from now -
2. Is fair trade coffee sustainable for the mass market,
or is it a niche product...
asked 11 seconds from now -
Please answer this asap in MATLAB.
In the following for loop, the the loop is executed...
asked 12 minutes ago -
A 50.0-g golf ball is driven from the tee with an initial speed
of 44.6 m/s...
asked 6 minutes ago -
Use the molar concentration of the 50 mL solution to calculate
the moles of Cr(III) in...
asked 9 minutes ago -
Calculate the molarity of Fe3+ in solution A.
Solution A: 10 mL of 0.0600 M Fe(No3)3 ...
asked 18 minutes ago -
two dogs pull 2 strings horizontally which are tied to a sleigh.
the angle between the...
asked 18 minutes ago -
please write a paper about any ethical violation based on the
case study Stanford's Prison Experiment....
asked 40 minutes ago -
What is the advantage of considering each of the
following in calculating the work done by...
asked 46 minutes ago -
Write a stored function that takes a number as its input and
returns that number as...
asked 45 minutes ago -
In the laboratory, a general chemistry student measured the pH
of a 0.527 M aqueous solution...
asked 51 minutes ago -
Water can decompose into H2 and O2 via electrolysis. How many
moles of H2 could theoretically...
asked 59 minutes ago