
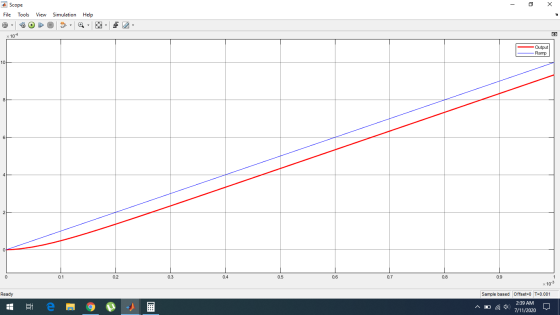
For the system shown here in tasks 1-4 I have determined that for the value of K<3 the system is unstable, for K=3 the system is in oscillation and K>3 the system is stable. However i am unsure how to calculate the value of K to achieve a steady state error of 0.01% for T ≥ 10.
Many Thanks for the assistance
Homework Answers
General Formula to find Steady-State Error:

Let our input is impulse:



We are given that, the steady-state error is less than 0.01%.


Response to a ramp input:
Add Answer to:
For the system shown here in tasks 1-4 I have determined that
for the value of...
Question 2 Consider the system shown in Figure Q2, where Wis a unit step disturbance and R is a unit step input. 0.4 s+ 1 10 Figure Q2 (5 marks) (3 marks) (c) Find the value for K so that the steady...
 Question 2 Consider the system shown in Figure Q2, where Wis a unit step disturbance and R is a unit step input. 0.4 s+ 1 10 Figure Q2 (5 marks) (3 marks) (c) Find the value for K so that the steady state error due to w(t) is less than 0.01; 6 marks) (d) In order to eliminate the steady state error, show whether a PI controller can be successful 6 marks) (a) Find the expression of E(s)-R(s)-Y(s) in terms...
Question 2 Consider the system shown in Figure Q2, where Wis a unit step disturbance and R is a unit step input. 0.4 s+ 1 10 Figure Q2 (5 marks) (3 marks) (c) Find the value for K so that the steady state error due to w(t) is less than 0.01; 6 marks) (d) In order to eliminate the steady state error, show whether a PI controller can be successful 6 marks) (a) Find the expression of E(s)-R(s)-Y(s) in terms...
Question 2 Consider the system shown in Figure Q2, where Wis a unit step disturbance and R is a unit step input. 0.4 s+ 1 10 Figure Q2 (5 marks) (3 marks) (c) Find the value for K so that the steady...
 Question 2 Consider the system shown in Figure Q2, where Wis a unit step disturbance and R is a unit step input. 0.4 s+ 1 10 Figure Q2 (5 marks) (3 marks) (c) Find the value for K so that the steady state error due to w(t) is less than 0.01; 6 marks) (d) In order to eliminate the steady state error, show whether a PI controller can be successful 6 marks) (a) Find the expression of E(s)-R(s)-Y(s) in terms...
Question 2 Consider the system shown in Figure Q2, where Wis a unit step disturbance and R is a unit step input. 0.4 s+ 1 10 Figure Q2 (5 marks) (3 marks) (c) Find the value for K so that the steady state error due to w(t) is less than 0.01; 6 marks) (d) In order to eliminate the steady state error, show whether a PI controller can be successful 6 marks) (a) Find the expression of E(s)-R(s)-Y(s) in terms...
Question 4: Consider the following system: 0.01 a) Describe the response to a unit step input...
 Question 4: Consider the following system: 0.01 a) Describe the response to a unit step input for K 0.01 and K-0.1 and determine the value of K for a non-oscillatory minimum response time. b) If we let K-1, what will be the value of the steady state error of this system in response to a unit step input? c) If we now replace the "proportional controller" (the box with the K in it) with a proportional integral (PI) controller, with...
Question 4: Consider the following system: 0.01 a) Describe the response to a unit step input for K 0.01 and K-0.1 and determine the value of K for a non-oscillatory minimum response time. b) If we let K-1, what will be the value of the steady state error of this system in response to a unit step input? c) If we now replace the "proportional controller" (the box with the K in it) with a proportional integral (PI) controller, with...
PROBLEM 4 Suppose that a system is shown in Figure 4. There are three controllers that might be incorporated into this system. 1. Ge (s)-K (proportional (P) controller) 2. GS)K/s (integral (I) contro...
 PROBLEM 4 Suppose that a system is shown in Figure 4. There are three controllers that might be incorporated into this system. 1. Ge (s)-K (proportional (P) controller) 2. GS)K/s (integral (I) controller) 3. G (s)K(1+1/s) (proportional, integral (PI) controller) The system requirements are T, < 10 seconds and P0 10% for a unit step response. (a) For the (P) controller, write a piece of MATLAB code to plot root locus for 0<K<,and find the K value so that the...
PROBLEM 4 Suppose that a system is shown in Figure 4. There are three controllers that might be incorporated into this system. 1. Ge (s)-K (proportional (P) controller) 2. GS)K/s (integral (I) controller) 3. G (s)K(1+1/s) (proportional, integral (PI) controller) The system requirements are T, < 10 seconds and P0 10% for a unit step response. (a) For the (P) controller, write a piece of MATLAB code to plot root locus for 0<K<,and find the K value so that the...
Problem #7 (10 points) For the feedback control system shown in figure (4), R) I. 2....
 Problem #7 (10 points) For the feedback control system shown in figure (4), R) I. 2. Determine the steady state error ess when K = 1 Determine the value of K to minimize the steady state error ess R(S) (s +2) 6+5 Figure (4) Problem #8 (10 points) For the feedback control system shown in figure (5, R(s)-ine the range of K such that the absolute value of the steady state error is less than 0.1 R(S) s+K Y(S) Figure...
Problem #7 (10 points) For the feedback control system shown in figure (4), R) I. 2. Determine the steady state error ess when K = 1 Determine the value of K to minimize the steady state error ess R(S) (s +2) 6+5 Figure (4) Problem #8 (10 points) For the feedback control system shown in figure (5, R(s)-ine the range of K such that the absolute value of the steady state error is less than 0.1 R(S) s+K Y(S) Figure...
1. A feedback control system is shown in the figure below. Suppose that our design objective...
 1. A feedback control system is shown in the figure below. Suppose that our design objective is to find a controller Gc(S) of minimal complexity such that our closed-loop system can track a unit step input with a steady-state error of zero. (b) Now consider a more complex controller Gc(S) = [ Ko + K//s] where Ko = 2 and Ki = 20. (This is a proportional + integral (PI) controller). Plot the unit step response, and determine the steady-state...
1. A feedback control system is shown in the figure below. Suppose that our design objective is to find a controller Gc(S) of minimal complexity such that our closed-loop system can track a unit step input with a steady-state error of zero. (b) Now consider a more complex controller Gc(S) = [ Ko + K//s] where Ko = 2 and Ki = 20. (This is a proportional + integral (PI) controller). Plot the unit step response, and determine the steady-state...
Problem 4. Consider the control system shown below with plant G(s) that has time con- stants...
 Problem 4. Consider the control system shown below with plant G(s) that has time con- stants T1 = 2, T2 = 10, and gain k = 0.1. 4 673 +1679+1) (1.) Sketch the pole-zero plot for G(s). Is one of the poles more dominant? Using MATLAB, simulate the step response of the plant itself, along with G1(s) and G2(s) as defined by Gl(s) = and G2(s) = sti + 1 ST2+1 (2.) Design a proportional gain C(s) = K so...
Problem 4. Consider the control system shown below with plant G(s) that has time con- stants T1 = 2, T2 = 10, and gain k = 0.1. 4 673 +1679+1) (1.) Sketch the pole-zero plot for G(s). Is one of the poles more dominant? Using MATLAB, simulate the step response of the plant itself, along with G1(s) and G2(s) as defined by Gl(s) = and G2(s) = sti + 1 ST2+1 (2.) Design a proportional gain C(s) = K so...
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the control...
 Please solve as a MATLAB code.
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the controller is given by G (s) 2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for (t) at. Here a 0.5°/s. Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G (s) with the following controller This is a Proportional-Integral (PI) controller. Repeat part...
Please solve as a MATLAB code.
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the controller is given by G (s) 2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for (t) at. Here a 0.5°/s. Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G (s) with the following controller This is a Proportional-Integral (PI) controller. Repeat part...
Question 3 (10 +10+10+15 45 marks) E(s) C(s) R(s) Figure 3: Unity feedback control system for Question 3 For the unity...
 Question 3 (10 +10+10+15 45 marks) E(s) C(s) R(s) Figure 3: Unity feedback control system for Question 3 For the unity feedback control system shown in Figure 3, 100 G(S) (s+2)(+10) Page 3 of 7 NEE3201 Examination Paper CRICOS Provider No: 00124k a) Determine the phase margin, the gain crossover frequency, the gain margin, the phase crossover frequency of the system when Gc(s)-1, 10 marks) b) Design a proportional controller Gc(s)-K so that a phase margin of 50° is achieved....
Question 3 (10 +10+10+15 45 marks) E(s) C(s) R(s) Figure 3: Unity feedback control system for Question 3 For the unity feedback control system shown in Figure 3, 100 G(S) (s+2)(+10) Page 3 of 7 NEE3201 Examination Paper CRICOS Provider No: 00124k a) Determine the phase margin, the gain crossover frequency, the gain margin, the phase crossover frequency of the system when Gc(s)-1, 10 marks) b) Design a proportional controller Gc(s)-K so that a phase margin of 50° is achieved....
Elevator motors require feedback control to avoid speed differences between up- ward and downward movement and...
 Elevator motors require feedback control to avoid speed differences between up- ward and downward movement and when a different number of passengers ride the elevator car. Soft acceleration and deceleration is achieved with the same feedback control system. A possible feedback control system is shown in Figure 2. E(s) Motor R(S) H(S) w(S) S+5 10 S+10 Figure 2: motor. Suggested feedback control system for controlling the speed ?(s) of an elevator The motor speed is measured with an optical encoder,...
Elevator motors require feedback control to avoid speed differences between up- ward and downward movement and when a different number of passengers ride the elevator car. Soft acceleration and deceleration is achieved with the same feedback control system. A possible feedback control system is shown in Figure 2. E(s) Motor R(S) H(S) w(S) S+5 10 S+10 Figure 2: motor. Suggested feedback control system for controlling the speed ?(s) of an elevator The motor speed is measured with an optical encoder,...
 Question 2 Consider the system shown in Figure Q2, where Wis a unit step disturbance and R is a unit step input. 0.4 s+ 1 10 Figure Q2 (5 marks) (3 marks) (c) Find the value for K so that the steady state error due to w(t) is less than 0.01; 6 marks) (d) In order to eliminate the steady state error, show whether a PI controller can be successful 6 marks) (a) Find the expression of E(s)-R(s)-Y(s) in terms...
Question 2 Consider the system shown in Figure Q2, where Wis a unit step disturbance and R is a unit step input. 0.4 s+ 1 10 Figure Q2 (5 marks) (3 marks) (c) Find the value for K so that the steady state error due to w(t) is less than 0.01; 6 marks) (d) In order to eliminate the steady state error, show whether a PI controller can be successful 6 marks) (a) Find the expression of E(s)-R(s)-Y(s) in terms...
 Question 2 Consider the system shown in Figure Q2, where Wis a unit step disturbance and R is a unit step input. 0.4 s+ 1 10 Figure Q2 (5 marks) (3 marks) (c) Find the value for K so that the steady state error due to w(t) is less than 0.01; 6 marks) (d) In order to eliminate the steady state error, show whether a PI controller can be successful 6 marks) (a) Find the expression of E(s)-R(s)-Y(s) in terms...
Question 2 Consider the system shown in Figure Q2, where Wis a unit step disturbance and R is a unit step input. 0.4 s+ 1 10 Figure Q2 (5 marks) (3 marks) (c) Find the value for K so that the steady state error due to w(t) is less than 0.01; 6 marks) (d) In order to eliminate the steady state error, show whether a PI controller can be successful 6 marks) (a) Find the expression of E(s)-R(s)-Y(s) in terms...
 Question 4: Consider the following system: 0.01 a) Describe the response to a unit step input for K 0.01 and K-0.1 and determine the value of K for a non-oscillatory minimum response time. b) If we let K-1, what will be the value of the steady state error of this system in response to a unit step input? c) If we now replace the "proportional controller" (the box with the K in it) with a proportional integral (PI) controller, with...
Question 4: Consider the following system: 0.01 a) Describe the response to a unit step input for K 0.01 and K-0.1 and determine the value of K for a non-oscillatory minimum response time. b) If we let K-1, what will be the value of the steady state error of this system in response to a unit step input? c) If we now replace the "proportional controller" (the box with the K in it) with a proportional integral (PI) controller, with...
 PROBLEM 4 Suppose that a system is shown in Figure 4. There are three controllers that might be incorporated into this system. 1. Ge (s)-K (proportional (P) controller) 2. GS)K/s (integral (I) controller) 3. G (s)K(1+1/s) (proportional, integral (PI) controller) The system requirements are T, < 10 seconds and P0 10% for a unit step response. (a) For the (P) controller, write a piece of MATLAB code to plot root locus for 0<K<,and find the K value so that the...
PROBLEM 4 Suppose that a system is shown in Figure 4. There are three controllers that might be incorporated into this system. 1. Ge (s)-K (proportional (P) controller) 2. GS)K/s (integral (I) controller) 3. G (s)K(1+1/s) (proportional, integral (PI) controller) The system requirements are T, < 10 seconds and P0 10% for a unit step response. (a) For the (P) controller, write a piece of MATLAB code to plot root locus for 0<K<,and find the K value so that the...
 Problem #7 (10 points) For the feedback control system shown in figure (4), R) I. 2. Determine the steady state error ess when K = 1 Determine the value of K to minimize the steady state error ess R(S) (s +2) 6+5 Figure (4) Problem #8 (10 points) For the feedback control system shown in figure (5, R(s)-ine the range of K such that the absolute value of the steady state error is less than 0.1 R(S) s+K Y(S) Figure...
Problem #7 (10 points) For the feedback control system shown in figure (4), R) I. 2. Determine the steady state error ess when K = 1 Determine the value of K to minimize the steady state error ess R(S) (s +2) 6+5 Figure (4) Problem #8 (10 points) For the feedback control system shown in figure (5, R(s)-ine the range of K such that the absolute value of the steady state error is less than 0.1 R(S) s+K Y(S) Figure...
 1. A feedback control system is shown in the figure below. Suppose that our design objective is to find a controller Gc(S) of minimal complexity such that our closed-loop system can track a unit step input with a steady-state error of zero. (b) Now consider a more complex controller Gc(S) = [ Ko + K//s] where Ko = 2 and Ki = 20. (This is a proportional + integral (PI) controller). Plot the unit step response, and determine the steady-state...
1. A feedback control system is shown in the figure below. Suppose that our design objective is to find a controller Gc(S) of minimal complexity such that our closed-loop system can track a unit step input with a steady-state error of zero. (b) Now consider a more complex controller Gc(S) = [ Ko + K//s] where Ko = 2 and Ki = 20. (This is a proportional + integral (PI) controller). Plot the unit step response, and determine the steady-state...
 Problem 4. Consider the control system shown below with plant G(s) that has time con- stants T1 = 2, T2 = 10, and gain k = 0.1. 4 673 +1679+1) (1.) Sketch the pole-zero plot for G(s). Is one of the poles more dominant? Using MATLAB, simulate the step response of the plant itself, along with G1(s) and G2(s) as defined by Gl(s) = and G2(s) = sti + 1 ST2+1 (2.) Design a proportional gain C(s) = K so...
Problem 4. Consider the control system shown below with plant G(s) that has time con- stants T1 = 2, T2 = 10, and gain k = 0.1. 4 673 +1679+1) (1.) Sketch the pole-zero plot for G(s). Is one of the poles more dominant? Using MATLAB, simulate the step response of the plant itself, along with G1(s) and G2(s) as defined by Gl(s) = and G2(s) = sti + 1 ST2+1 (2.) Design a proportional gain C(s) = K so...
 Please solve as a MATLAB code.
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the controller is given by G (s) 2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for (t) at. Here a 0.5°/s. Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G (s) with the following controller This is a Proportional-Integral (PI) controller. Repeat part...
Please solve as a MATLAB code.
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the controller is given by G (s) 2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for (t) at. Here a 0.5°/s. Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G (s) with the following controller This is a Proportional-Integral (PI) controller. Repeat part...
 Question 3 (10 +10+10+15 45 marks) E(s) C(s) R(s) Figure 3: Unity feedback control system for Question 3 For the unity feedback control system shown in Figure 3, 100 G(S) (s+2)(+10) Page 3 of 7 NEE3201 Examination Paper CRICOS Provider No: 00124k a) Determine the phase margin, the gain crossover frequency, the gain margin, the phase crossover frequency of the system when Gc(s)-1, 10 marks) b) Design a proportional controller Gc(s)-K so that a phase margin of 50° is achieved....
Question 3 (10 +10+10+15 45 marks) E(s) C(s) R(s) Figure 3: Unity feedback control system for Question 3 For the unity feedback control system shown in Figure 3, 100 G(S) (s+2)(+10) Page 3 of 7 NEE3201 Examination Paper CRICOS Provider No: 00124k a) Determine the phase margin, the gain crossover frequency, the gain margin, the phase crossover frequency of the system when Gc(s)-1, 10 marks) b) Design a proportional controller Gc(s)-K so that a phase margin of 50° is achieved....
 Elevator motors require feedback control to avoid speed differences between up- ward and downward movement and when a different number of passengers ride the elevator car. Soft acceleration and deceleration is achieved with the same feedback control system. A possible feedback control system is shown in Figure 2. E(s) Motor R(S) H(S) w(S) S+5 10 S+10 Figure 2: motor. Suggested feedback control system for controlling the speed ?(s) of an elevator The motor speed is measured with an optical encoder,...
Elevator motors require feedback control to avoid speed differences between up- ward and downward movement and when a different number of passengers ride the elevator car. Soft acceleration and deceleration is achieved with the same feedback control system. A possible feedback control system is shown in Figure 2. E(s) Motor R(S) H(S) w(S) S+5 10 S+10 Figure 2: motor. Suggested feedback control system for controlling the speed ?(s) of an elevator The motor speed is measured with an optical encoder,...
Most questions answered within 3 hours.
-
Blood pressure is normally taken on the upper arm at the level
of the heart. Suppose,...
asked 1 minute ago -
trust is best established through the combination of ------and
------- .
1. magnanimity and justice
2....
asked 2 minutes ago -
Calculate the [OH (aq)] in limes which have a [H3O*(aq)] of 1.3 x
10 mol/L
asked 2 minutes ago -
Suppose that the satellite around the earth has an orbit that is
24 KM larger in...
asked 4 minutes ago -
A nozzle with a radius of 0.250 cm is attached to a garden hose
with a...
asked 13 minutes ago -
PLEASE do not use any loops for the program; only recursion is
allowed
4. Write a...
asked 22 minutes ago -
Please help me with me. I did the first part to write the operations but in...
asked 19 minutes ago -
Use Cryptool to find the Cryptographic SHA-1 hash value of the
string "abc". The calculator is...
asked 23 minutes ago -
You are attempting to calculate a firm’s free cash flow to
equity. You know the following...
asked 1 hour ago -
the following reaction occurs in a balloon containing
N2O2 gas
N2O4(g)=2NO2(g)
will the volume of the...
asked 1 hour ago -
answer the questions throughout this program
public class Day implements Comparable {
Private Boolean atWork;...
asked 1 hour ago -
This is C++ code for parking fee management program
#include <iostream>
#include <iomanip>
using namespace std;...
asked 2 hours ago