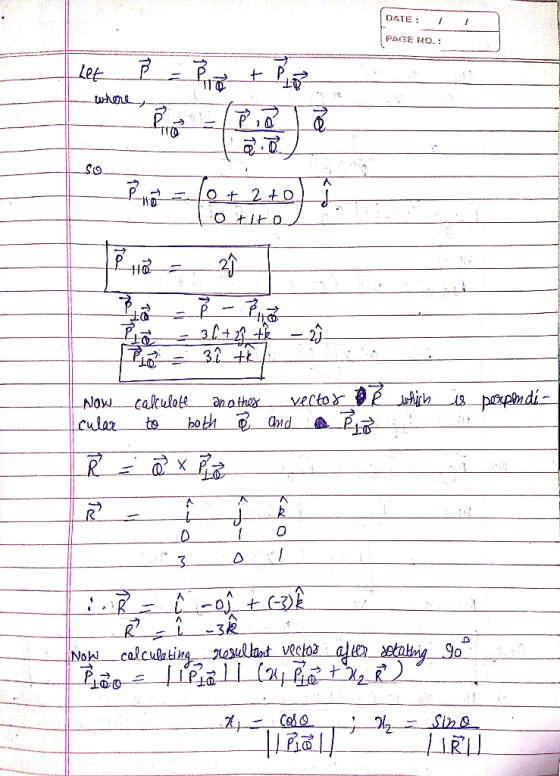
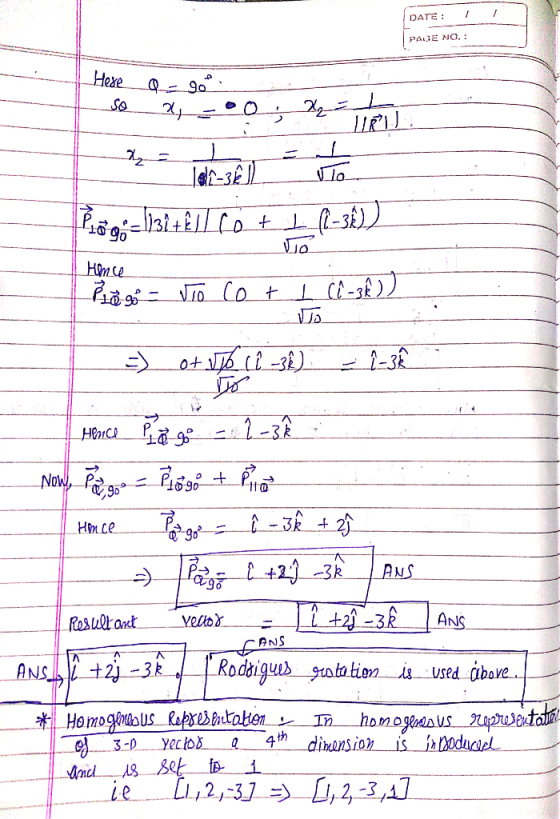
In 3D space, rotate an object at its center positioned at (3,2,1) about vector (0,1,0) by 90 degr...
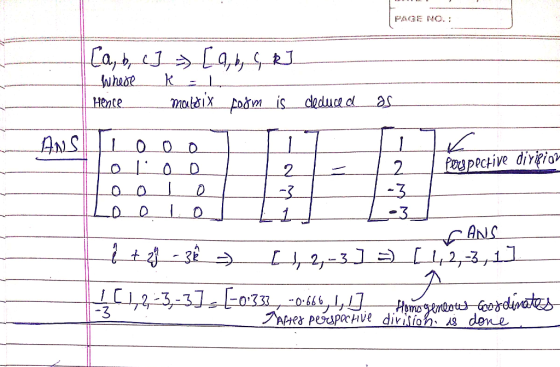
In 3D space, rotate an object at its center positioned at (3,2,1) about vector (0,1,0) by 90 degrees. Specify the transformation sequence and computer the final matrix in homogeneous representation
Homework Answers

Add Answer to:
In 3D space, rotate an object at its center positioned at (3,2,1) about vector (0,1,0) by 90 degr...
A proposed space station consists of a circular tube that will rotate about its center (like...
 A proposed space station consists of a circular tube that will
rotate about its center (like a tubular bicycle tire) as shown in
the figure(Figure 1) . The circle formed by the tube has a diameter
of about 1.1 km. please show work
Problem 5.13 Part A A proposed space station consists of a circular tube that will rotate about its center (like a tubular bicycle tire) as shown in the figure(Figure 1). The circle formed by the tube has...
A proposed space station consists of a circular tube that will
rotate about its center (like a tubular bicycle tire) as shown in
the figure(Figure 1) . The circle formed by the tube has a diameter
of about 1.1 km. please show work
Problem 5.13 Part A A proposed space station consists of a circular tube that will rotate about its center (like a tubular bicycle tire) as shown in the figure(Figure 1). The circle formed by the tube has...
A unit cube as shown in Figure Q1 is undergoing the transformations described in (i) and...
 A unit cube as shown in Figure Q1 is undergoing the transformations described in (i) and (ii) respectively. Sketch the resultant object with coordinates of each vertex after each transformation. (a) Z (0,1,1) (1,1,1) (0,0,1) (1,0,1) (0,0,0) (1,1,0) (1,0,0) Figure Q1 Transformation (i) (6 marks) 1. A Uniform scale by a factor of 2 2. Followed by a rotation about the-axis in counter-clockwise direction by 90 degrees 3. Followed by a transformation moving in the direction of < 2, 1,...
A unit cube as shown in Figure Q1 is undergoing the transformations described in (i) and (ii) respectively. Sketch the resultant object with coordinates of each vertex after each transformation. (a) Z (0,1,1) (1,1,1) (0,0,1) (1,0,1) (0,0,0) (1,1,0) (1,0,0) Figure Q1 Transformation (i) (6 marks) 1. A Uniform scale by a factor of 2 2. Followed by a rotation about the-axis in counter-clockwise direction by 90 degrees 3. Followed by a transformation moving in the direction of < 2, 1,...
this is a question about 3D transformation , can anyone help me out please The aircraft carrier initially sits at the dock at point D, facing north. It travels 1000 metres north then turns 90° to fac...
 this is a question about 3D transformation , can anyone help me
out please
The aircraft carrier initially sits at the dock at point D, facing north. It travels 1000 metres north then turns 90° to face the east, as shown in Figure 3. 90° 1000m (c) after turning 90 east. Assume a world coordinate frame with D as the origin. The x-axis points west, the y-axis points vertically up and the z-axis points north. One unit- one metre. representing...
this is a question about 3D transformation , can anyone help me
out please
The aircraft carrier initially sits at the dock at point D, facing north. It travels 1000 metres north then turns 90° to face the east, as shown in Figure 3. 90° 1000m (c) after turning 90 east. Assume a world coordinate frame with D as the origin. The x-axis points west, the y-axis points vertically up and the z-axis points north. One unit- one metre. representing...
o Part I: The two wheels shown rotate about a fixed axle through their center the...
 o Part I: The two wheels shown rotate about a fixed axle through their center the masses and radii of the wheels are as shown in the diagram). The two wheels are initially at rest. A 1 N of force is applied to each wheel as shown. You can assume that the wheels are essentially hoops (Inoop = MR2). In order for IF I = 1N IF 21. = 1 N the angular accelerations of the two wheels to be...
o Part I: The two wheels shown rotate about a fixed axle through their center the masses and radii of the wheels are as shown in the diagram). The two wheels are initially at rest. A 1 N of force is applied to each wheel as shown. You can assume that the wheels are essentially hoops (Inoop = MR2). In order for IF I = 1N IF 21. = 1 N the angular accelerations of the two wheels to be...
Part I: The two wheels shown rotate about a fixed axle through their center (the masses...
 Part I: The two wheels shown rotate about a fixed axle through their center (the masses and radii of the wheels are as shown in the diagram). The two wheels are initially at rest. A 1 N of force is applied to each wheel as shown. You can assume that the wheels are essentially hoops (Inoop = MR2). In order for IF I = 1N IF I = 1 N the angular accelerations of the two wheels to be the...
Part I: The two wheels shown rotate about a fixed axle through their center (the masses and radii of the wheels are as shown in the diagram). The two wheels are initially at rest. A 1 N of force is applied to each wheel as shown. You can assume that the wheels are essentially hoops (Inoop = MR2). In order for IF I = 1N IF I = 1 N the angular accelerations of the two wheels to be the...
Part I: The two wheels shown rotate about a fixed axle through their center (the masses...
 Part I: The two wheels shown rotate about a fixed axle through their center (the masses and radii of the wheels are as shown in the diagram). The two wheels are initially at rest. A 1 N of force is applied to each wheel as shown. You can assume that the wheels are essentially hoops (Inoop = MR2). In order for F.l=1N IF= 1 N the angular accelerations of the two wheels to be the same, at what angle must...
Part I: The two wheels shown rotate about a fixed axle through their center (the masses and radii of the wheels are as shown in the diagram). The two wheels are initially at rest. A 1 N of force is applied to each wheel as shown. You can assume that the wheels are essentially hoops (Inoop = MR2). In order for F.l=1N IF= 1 N the angular accelerations of the two wheels to be the same, at what angle must...
Part I: The two wheels shown rotate about a fixed axle through their center (the masses...
 Part I: The two wheels shown rotate about a fixed axle through their center (the masses and radii of the wheels are as shown in the diagram). The two wheels are initially at rest. A 1 N of force is applied to each wheel as shown. You can assume that the wheels are essentially hoops (Inoop = MR2). In order for F1 = 1N IF_1= 1 N the angular accelerations of the two wheels to be the same, at what...
Part I: The two wheels shown rotate about a fixed axle through their center (the masses and radii of the wheels are as shown in the diagram). The two wheels are initially at rest. A 1 N of force is applied to each wheel as shown. You can assume that the wheels are essentially hoops (Inoop = MR2). In order for F1 = 1N IF_1= 1 N the angular accelerations of the two wheels to be the same, at what...
For this project, each part will be in its oun matlab script. You will be uploading a total 3 m f...
 For this project, each part will be in its oun matlab script. You will be uploading a total 3 m files. Be sure to make your variable names descriptive, and add comments regularly to describe what your code is doing and hou your code aligns with the assignment 1 Iterative Methods: Conjugate Gradient In most software applications, row reduction is rarely used to solve a linear system Ar-b instead, an iterative algorithm like the one presented below is used. 1.1...
For this project, each part will be in its oun matlab script. You will be uploading a total 3 m files. Be sure to make your variable names descriptive, and add comments regularly to describe what your code is doing and hou your code aligns with the assignment 1 Iterative Methods: Conjugate Gradient In most software applications, row reduction is rarely used to solve a linear system Ar-b instead, an iterative algorithm like the one presented below is used. 1.1...
could you please help me with this problem, also I need a little text so I...
 could you please help me with this problem, also I
need a little text so I can understand how you solved the
problem?
import java.io.File; import java.util.Scanner; /** *
This program lists the files in a directory specified by * the
user. The user is asked to type in a directory name. * If the name
entered by the user is not a directory, a * message is printed and
the program ends. */ public class DirectoryList { public static...
could you please help me with this problem, also I
need a little text so I can understand how you solved the
problem?
import java.io.File; import java.util.Scanner; /** *
This program lists the files in a directory specified by * the
user. The user is asked to type in a directory name. * If the name
entered by the user is not a directory, a * message is printed and
the program ends. */ public class DirectoryList { public static...
 A proposed space station consists of a circular tube that will
rotate about its center (like a tubular bicycle tire) as shown in
the figure(Figure 1) . The circle formed by the tube has a diameter
of about 1.1 km. please show work
Problem 5.13 Part A A proposed space station consists of a circular tube that will rotate about its center (like a tubular bicycle tire) as shown in the figure(Figure 1). The circle formed by the tube has...
A proposed space station consists of a circular tube that will
rotate about its center (like a tubular bicycle tire) as shown in
the figure(Figure 1) . The circle formed by the tube has a diameter
of about 1.1 km. please show work
Problem 5.13 Part A A proposed space station consists of a circular tube that will rotate about its center (like a tubular bicycle tire) as shown in the figure(Figure 1). The circle formed by the tube has...
 A unit cube as shown in Figure Q1 is undergoing the transformations described in (i) and (ii) respectively. Sketch the resultant object with coordinates of each vertex after each transformation. (a) Z (0,1,1) (1,1,1) (0,0,1) (1,0,1) (0,0,0) (1,1,0) (1,0,0) Figure Q1 Transformation (i) (6 marks) 1. A Uniform scale by a factor of 2 2. Followed by a rotation about the-axis in counter-clockwise direction by 90 degrees 3. Followed by a transformation moving in the direction of < 2, 1,...
A unit cube as shown in Figure Q1 is undergoing the transformations described in (i) and (ii) respectively. Sketch the resultant object with coordinates of each vertex after each transformation. (a) Z (0,1,1) (1,1,1) (0,0,1) (1,0,1) (0,0,0) (1,1,0) (1,0,0) Figure Q1 Transformation (i) (6 marks) 1. A Uniform scale by a factor of 2 2. Followed by a rotation about the-axis in counter-clockwise direction by 90 degrees 3. Followed by a transformation moving in the direction of < 2, 1,...
 this is a question about 3D transformation , can anyone help me
out please
The aircraft carrier initially sits at the dock at point D, facing north. It travels 1000 metres north then turns 90° to face the east, as shown in Figure 3. 90° 1000m (c) after turning 90 east. Assume a world coordinate frame with D as the origin. The x-axis points west, the y-axis points vertically up and the z-axis points north. One unit- one metre. representing...
this is a question about 3D transformation , can anyone help me
out please
The aircraft carrier initially sits at the dock at point D, facing north. It travels 1000 metres north then turns 90° to face the east, as shown in Figure 3. 90° 1000m (c) after turning 90 east. Assume a world coordinate frame with D as the origin. The x-axis points west, the y-axis points vertically up and the z-axis points north. One unit- one metre. representing...
 o Part I: The two wheels shown rotate about a fixed axle through their center the masses and radii of the wheels are as shown in the diagram). The two wheels are initially at rest. A 1 N of force is applied to each wheel as shown. You can assume that the wheels are essentially hoops (Inoop = MR2). In order for IF I = 1N IF 21. = 1 N the angular accelerations of the two wheels to be...
o Part I: The two wheels shown rotate about a fixed axle through their center the masses and radii of the wheels are as shown in the diagram). The two wheels are initially at rest. A 1 N of force is applied to each wheel as shown. You can assume that the wheels are essentially hoops (Inoop = MR2). In order for IF I = 1N IF 21. = 1 N the angular accelerations of the two wheels to be...
 Part I: The two wheels shown rotate about a fixed axle through their center (the masses and radii of the wheels are as shown in the diagram). The two wheels are initially at rest. A 1 N of force is applied to each wheel as shown. You can assume that the wheels are essentially hoops (Inoop = MR2). In order for IF I = 1N IF I = 1 N the angular accelerations of the two wheels to be the...
Part I: The two wheels shown rotate about a fixed axle through their center (the masses and radii of the wheels are as shown in the diagram). The two wheels are initially at rest. A 1 N of force is applied to each wheel as shown. You can assume that the wheels are essentially hoops (Inoop = MR2). In order for IF I = 1N IF I = 1 N the angular accelerations of the two wheels to be the...
 Part I: The two wheels shown rotate about a fixed axle through their center (the masses and radii of the wheels are as shown in the diagram). The two wheels are initially at rest. A 1 N of force is applied to each wheel as shown. You can assume that the wheels are essentially hoops (Inoop = MR2). In order for F.l=1N IF= 1 N the angular accelerations of the two wheels to be the same, at what angle must...
Part I: The two wheels shown rotate about a fixed axle through their center (the masses and radii of the wheels are as shown in the diagram). The two wheels are initially at rest. A 1 N of force is applied to each wheel as shown. You can assume that the wheels are essentially hoops (Inoop = MR2). In order for F.l=1N IF= 1 N the angular accelerations of the two wheels to be the same, at what angle must...
 Part I: The two wheels shown rotate about a fixed axle through their center (the masses and radii of the wheels are as shown in the diagram). The two wheels are initially at rest. A 1 N of force is applied to each wheel as shown. You can assume that the wheels are essentially hoops (Inoop = MR2). In order for F1 = 1N IF_1= 1 N the angular accelerations of the two wheels to be the same, at what...
Part I: The two wheels shown rotate about a fixed axle through their center (the masses and radii of the wheels are as shown in the diagram). The two wheels are initially at rest. A 1 N of force is applied to each wheel as shown. You can assume that the wheels are essentially hoops (Inoop = MR2). In order for F1 = 1N IF_1= 1 N the angular accelerations of the two wheels to be the same, at what...
 For this project, each part will be in its oun matlab script. You will be uploading a total 3 m files. Be sure to make your variable names descriptive, and add comments regularly to describe what your code is doing and hou your code aligns with the assignment 1 Iterative Methods: Conjugate Gradient In most software applications, row reduction is rarely used to solve a linear system Ar-b instead, an iterative algorithm like the one presented below is used. 1.1...
For this project, each part will be in its oun matlab script. You will be uploading a total 3 m files. Be sure to make your variable names descriptive, and add comments regularly to describe what your code is doing and hou your code aligns with the assignment 1 Iterative Methods: Conjugate Gradient In most software applications, row reduction is rarely used to solve a linear system Ar-b instead, an iterative algorithm like the one presented below is used. 1.1...
 could you please help me with this problem, also I
need a little text so I can understand how you solved the
problem?
import java.io.File; import java.util.Scanner; /** *
This program lists the files in a directory specified by * the
user. The user is asked to type in a directory name. * If the name
entered by the user is not a directory, a * message is printed and
the program ends. */ public class DirectoryList { public static...
could you please help me with this problem, also I
need a little text so I can understand how you solved the
problem?
import java.io.File; import java.util.Scanner; /** *
This program lists the files in a directory specified by * the
user. The user is asked to type in a directory name. * If the name
entered by the user is not a directory, a * message is printed and
the program ends. */ public class DirectoryList { public static...
Most questions answered within 3 hours.
-
The Food Marketing Institute shows that 17% of households spend
more than $100 per week on...
asked 30 seconds ago -
Go to NCBI BLAST search web page
1st search: GEKDLRRAKDINQEVYNF
2nd search: PTSQRLQLLEPFDK
3rd search: GEKDLRRAKDINQEVYNF...
asked 4 minutes ago -
Explain how each of the following three conditions could be a
red flag for a register...
asked 8 minutes ago -
In a two-way factorial ANOVA, the final F-ratio for
factor AxB is determined by dividing _____...
asked 39 minutes ago -
Show your solutions for answer.
4. An aqueous solution contains 9.21 g of
K4Fe(CN)6 in a...
asked 9 minutes ago -
The random variable X has a uniform distribution with values
between 16 and 18. What is...
asked 18 minutes ago -
Evaluate each of the following transactions in terms of their
effect on assets, liabilities, and equity....
asked 17 minutes ago -
The amounts of nicotine in a certain brand of cigarette are
normally distributed with a mean...
asked 38 minutes ago -
The commercial lending department of First Bank made a
substantial loan to Alpha Company after obtaining...
asked 23 minutes ago -
For a reaction, reagents --->products, it's forwarding rate
(rate of products formation) is proportional to the...
asked 36 minutes ago -
5)
Typically,
there will need to be a rather high degree of coordination and
interaction among...
asked 32 minutes ago -
if the marginal revenue on each MRI is $2500, and the
marginal cost for each is...
asked 34 minutes ago