![[2 Marks] 18. If (z) and u[n]-cos(2n)지지 the correct value of V(z) will be (2z-1) js 2 2zei5-1 2ze-15-1 2 2zel5-12ze-15-1 19.](http://img.homeworklib.com/images/b111846d-05dc-43a4-b116-8742b1a5afa3.png?x-oss-process=image/resize,w_560)
![21. An LTI system is described by the following input/output difference equation: yln] 0.12yln x[n] (assume zero initial cond](http://img.homeworklib.com/images/ce00c7f0-e183-4551-b617-0812806793b3.png?x-oss-process=image/resize,w_560)
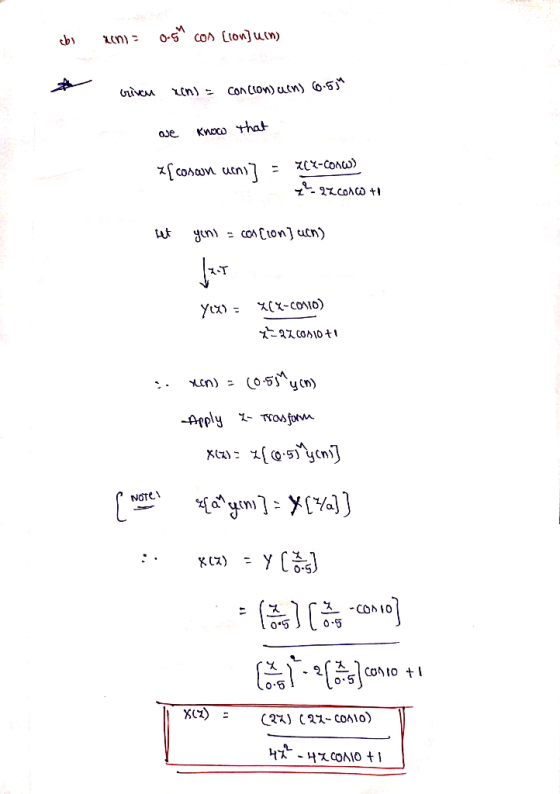
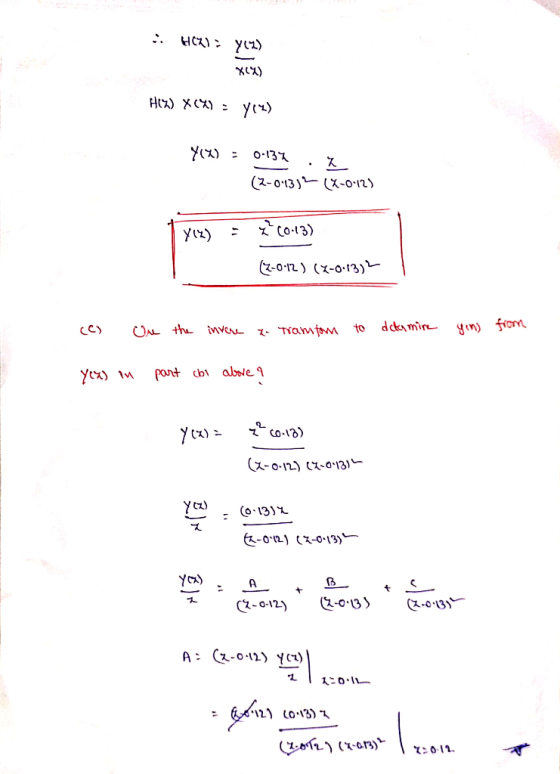
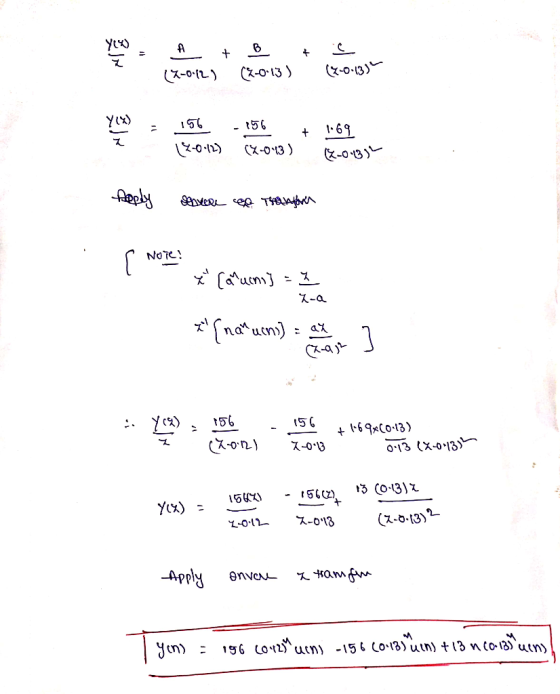
21. An LTI system is described by the following input/output difference equation: yln] 0.12yln x[n] (assume zero initial conditions) Use the Z- transform to obtain the system transfer function H(z)- Y(z) X(z) . a) [4 Marks] b) If the input signal to the system above is xIn] n(0.13"lu(n), determine the Yz) 5 Marks] c) Use the inverse Z-transform to determine y[n] from Y(z) in part b) above. [4 Marks]
Homework Answers








Add Answer to:
[2 Marks] 18. If (z) and u[n]-cos(2n)지지 the correct value of V(z) will be (2z-1) js 2 2zei5-1 2ze-15-1 2 2zel5-12ze-15-1 19. Determine the Z-transform of x[n]. [2 Marks each] n] sinl0n)u[n]0.3"...
2-If X1(z)Find the Z-Transform of X2[x]-X, ln +3]u[n] Find theZ-Transform of X211 ( I-hind the ...
 2-If X1(z)Find the Z-Transform of X2[x]-X, ln +3]u[n] Find theZ-Transform of X211 ( I-hind the Inverse Z-transform of given function. a) R(Z) =- (1-e") (-(z-e-ar) 3 +282+8-1 b) F (Z) = (2-2)2(2+2) Find the Z-Transform of X2 [x] = X1 [n + 3] u [n] 3- Solve the difference equation 3 4 With initial conditions y-1] 1 and yl-2] 3 4- Let the step response of a linear, time-invariant, causal system be 72 3) ulnl 15 3 a) Find the...
2-If X1(z)Find the Z-Transform of X2[x]-X, ln +3]u[n] Find theZ-Transform of X211 ( I-hind the Inverse Z-transform of given function. a) R(Z) =- (1-e") (-(z-e-ar) 3 +282+8-1 b) F (Z) = (2-2)2(2+2) Find the Z-Transform of X2 [x] = X1 [n + 3] u [n] 3- Solve the difference equation 3 4 With initial conditions y-1] 1 and yl-2] 3 4- Let the step response of a linear, time-invariant, causal system be 72 3) ulnl 15 3 a) Find the...
(a) Find the z-transform of (i) x[n] = a"u[n] +b"u[n] + cºul-n – 1], lal <151...
 (a) Find the z-transform of (i) x[n] = a"u[n] +b"u[n] + cºul-n – 1], lal <151 < le|| (ii) x[n] = n*a"u[n] (iii) x[n] = en* [cos (în)]u[n] – en" (cos (ien)] u[n – 1] (b) 1. Find the inverse z-transform of 1-jz-1 X(2) = (1+{z-1)(1 – {z-1) 2. Determine the inverse z-transform of x[n] is causal X(x) = log(1 – 2z), by (a) using the power series log(1 – x) = - 95 121 <1; (b) first differentiating X(2)...
(a) Find the z-transform of (i) x[n] = a"u[n] +b"u[n] + cºul-n – 1], lal <151 < le|| (ii) x[n] = n*a"u[n] (iii) x[n] = en* [cos (în)]u[n] – en" (cos (ien)] u[n – 1] (b) 1. Find the inverse z-transform of 1-jz-1 X(2) = (1+{z-1)(1 – {z-1) 2. Determine the inverse z-transform of x[n] is causal X(x) = log(1 – 2z), by (a) using the power series log(1 – x) = - 95 121 <1; (b) first differentiating X(2)...
Problem 5. Determine the z-transform of the signal x[n] :=(-1)"nu[n]. You may use already known z-transforms,...
 Problem 5. Determine the z-transform of the signal x[n] :=(-1)"nu[n]. You may use already known z-transforms, such as those listed in Table 5.1 (page 492) of the textbook, and properties of the z-transform. Moreover, notice that -1 = ejt. TABLE 5.1 Select (Unilateral) Z-Transform Pairs x[n] X[z] 8[n-k] ? 2-1 ոս[ո] (z - 1) z(z+1) (2-1)3 nºu[n] nu[n] z(z? + 4z +1) (2-1) Yºu[n] yn-u[n- 1] z-y 12 ny"u[n] (z-7) yz(z+y) (z-7)3 ny"u[n] n(n - 1)(n-2) (n-m+1) ym! lyl" cos...
Problem 5. Determine the z-transform of the signal x[n] :=(-1)"nu[n]. You may use already known z-transforms, such as those listed in Table 5.1 (page 492) of the textbook, and properties of the z-transform. Moreover, notice that -1 = ejt. TABLE 5.1 Select (Unilateral) Z-Transform Pairs x[n] X[z] 8[n-k] ? 2-1 ոս[ո] (z - 1) z(z+1) (2-1)3 nºu[n] nu[n] z(z? + 4z +1) (2-1) Yºu[n] yn-u[n- 1] z-y 12 ny"u[n] (z-7) yz(z+y) (z-7)3 ny"u[n] n(n - 1)(n-2) (n-m+1) ym! lyl" cos...
A causal and stable LTI system has the property that: 〖(4/5)〗^n u(n) →n 〖(4/5)〗^n u(n) Determine...
 A causal and stable LTI system has the property that:
〖(4/5)〗^n u(n) →n 〖(4/5)〗^n u(n)
Determine the frequency response H(e^jω) for the system.
Determine a difference equation relating any input x(n) and
the corresponding output y(n).
Question 3:[4 Marks] A causal and stable LTI system has the property that: 4 4 a) Determine the frequency response H(e/ø) for the system. b) Determine a difference equation relating any input x(n) and the corresponding output y(n)
A causal and stable LTI system has the property that:
〖(4/5)〗^n u(n) →n 〖(4/5)〗^n u(n)
Determine the frequency response H(e^jω) for the system.
Determine a difference equation relating any input x(n) and
the corresponding output y(n).
Question 3:[4 Marks] A causal and stable LTI system has the property that: 4 4 a) Determine the frequency response H(e/ø) for the system. b) Determine a difference equation relating any input x(n) and the corresponding output y(n)
Question 3 (30 marks) Consider the digital filter structure shown in the below figure: x[n yIn] 3 (a) Transform the giv...
 Question 3 (30 marks) Consider the digital filter structure shown in the below figure: x[n yIn] 3 (a) Transform the given block diagram to the transposed direct form II one. 2 (b) Determine the difference-equation representation of the system 4 (c) Find the transfer function for this causal filter and state the pole-zero pattern (d) Determine the impulse response of the system 2 (e) For what values of k is the system stable? (f) Determine yln if k 1 and...
Question 3 (30 marks) Consider the digital filter structure shown in the below figure: x[n yIn] 3 (a) Transform the given block diagram to the transposed direct form II one. 2 (b) Determine the difference-equation representation of the system 4 (c) Find the transfer function for this causal filter and state the pole-zero pattern (d) Determine the impulse response of the system 2 (e) For what values of k is the system stable? (f) Determine yln if k 1 and...
where M=7 322-M2 4) Find the inverse - transform of F(z) = (2-1)(2-2M)' (15 marks) 0...
 where M=7
322-M2 4) Find the inverse - transform of F(z) = (2-1)(2-2M)' (15 marks) 0 t<-M/2 M <t< - 5) Show that the Fourier transform of function f(t) sin 7 s (10 marks) au 6) Show that u = ln(x2 + xy + y2) satisfies the partial differential equation x x ди +y 2. (7 marks) au 7) Solve the partial differential equation = e-cos(x) where at du x = 0, at =tet ax at and t = 0,...
where M=7
322-M2 4) Find the inverse - transform of F(z) = (2-1)(2-2M)' (15 marks) 0 t<-M/2 M <t< - 5) Show that the Fourier transform of function f(t) sin 7 s (10 marks) au 6) Show that u = ln(x2 + xy + y2) satisfies the partial differential equation x x ди +y 2. (7 marks) au 7) Solve the partial differential equation = e-cos(x) where at du x = 0, at =tet ax at and t = 0,...
Use the Z-transform to find the general solution (zero-input and zero-state) for the following linear recursive...
 Use the Z-transform to find the general solution (zero-input and zero-state) for the following linear recursive difference equation written in advanced form: y[n+2] +3y[n+1]+2y[n] = 2x[n+2] A. Use the Z-transform to find the zero-input solution with initial conditions: y[-2]=2, and y(-1)=3 B. Use the Z-transform to find the zero-state solution if the source function is given by, x[n]=3" u[n] C. Write the general solution to the linear recursive difference equation D. Use the Z-transform to find the transfer function (H(z))...
Use the Z-transform to find the general solution (zero-input and zero-state) for the following linear recursive difference equation written in advanced form: y[n+2] +3y[n+1]+2y[n] = 2x[n+2] A. Use the Z-transform to find the zero-input solution with initial conditions: y[-2]=2, and y(-1)=3 B. Use the Z-transform to find the zero-state solution if the source function is given by, x[n]=3" u[n] C. Write the general solution to the linear recursive difference equation D. Use the Z-transform to find the transfer function (H(z))...
1. An LTI digital system with impulse response h[n] = 2(1/4)"u[n] produces an output y[n] =...
 1. An LTI digital system with impulse response h[n] = 2(1/4)"u[n] produces an output y[n] = (-3)"u[n]. Determine the corresponding input x[n] using Z-transform. (30 points)
1. An LTI digital system with impulse response h[n] = 2(1/4)"u[n] produces an output y[n] = (-3)"u[n]. Determine the corresponding input x[n] using Z-transform. (30 points)
7. A causal LTI system has a transfer function given by H (z) = -1 (1...
 7. A causal LTI system has a transfer function given by H (z) = -1 (1 4 The input to the system is x[n] = (0.5)"u[n] + u[-n-1] ) Find the impulse response of the system b) Determine the difference equation that describes the system. c) Find the output y[n]. d) Is the system stable?
7. A causal LTI system has a transfer function given by H (z) = -1 (1 4 The input to the system is x[n] = (0.5)"u[n] + u[-n-1] ) Find the impulse response of the system b) Determine the difference equation that describes the system. c) Find the output y[n]. d) Is the system stable?
Suppose the signal x[n] = δ[n-1] + cos(nn/6+ π/4) is input to the LTI system described by the equation y[n][n] +r|n - 0.5yn -. Determine a closed-form expression for yn] Suppose the signal x[n]...
 Suppose the signal x[n] = δ[n-1] + cos(nn/6+ π/4) is input to the LTI system described by the equation y[n][n] +r|n - 0.5yn -. Determine a closed-form expression for yn]
Suppose the signal x[n] = δ[n-1] + cos(nn/6+ π/4) is input to the LTI system described by the equation y[n][n] +r|n - 0.5yn -. Determine a closed-form expression for yn]
Suppose the signal x[n] = δ[n-1] + cos(nn/6+ π/4) is input to the LTI system described by the equation y[n][n] +r|n - 0.5yn -. Determine a closed-form expression for yn]
Suppose the signal x[n] = δ[n-1] + cos(nn/6+ π/4) is input to the LTI system described by the equation y[n][n] +r|n - 0.5yn -. Determine a closed-form expression for yn]
 2-If X1(z)Find the Z-Transform of X2[x]-X, ln +3]u[n] Find theZ-Transform of X211 ( I-hind the Inverse Z-transform of given function. a) R(Z) =- (1-e") (-(z-e-ar) 3 +282+8-1 b) F (Z) = (2-2)2(2+2) Find the Z-Transform of X2 [x] = X1 [n + 3] u [n] 3- Solve the difference equation 3 4 With initial conditions y-1] 1 and yl-2] 3 4- Let the step response of a linear, time-invariant, causal system be 72 3) ulnl 15 3 a) Find the...
2-If X1(z)Find the Z-Transform of X2[x]-X, ln +3]u[n] Find theZ-Transform of X211 ( I-hind the Inverse Z-transform of given function. a) R(Z) =- (1-e") (-(z-e-ar) 3 +282+8-1 b) F (Z) = (2-2)2(2+2) Find the Z-Transform of X2 [x] = X1 [n + 3] u [n] 3- Solve the difference equation 3 4 With initial conditions y-1] 1 and yl-2] 3 4- Let the step response of a linear, time-invariant, causal system be 72 3) ulnl 15 3 a) Find the...
 (a) Find the z-transform of (i) x[n] = a"u[n] +b"u[n] + cºul-n – 1], lal <151 < le|| (ii) x[n] = n*a"u[n] (iii) x[n] = en* [cos (în)]u[n] – en" (cos (ien)] u[n – 1] (b) 1. Find the inverse z-transform of 1-jz-1 X(2) = (1+{z-1)(1 – {z-1) 2. Determine the inverse z-transform of x[n] is causal X(x) = log(1 – 2z), by (a) using the power series log(1 – x) = - 95 121 <1; (b) first differentiating X(2)...
(a) Find the z-transform of (i) x[n] = a"u[n] +b"u[n] + cºul-n – 1], lal <151 < le|| (ii) x[n] = n*a"u[n] (iii) x[n] = en* [cos (în)]u[n] – en" (cos (ien)] u[n – 1] (b) 1. Find the inverse z-transform of 1-jz-1 X(2) = (1+{z-1)(1 – {z-1) 2. Determine the inverse z-transform of x[n] is causal X(x) = log(1 – 2z), by (a) using the power series log(1 – x) = - 95 121 <1; (b) first differentiating X(2)...
 Problem 5. Determine the z-transform of the signal x[n] :=(-1)"nu[n]. You may use already known z-transforms, such as those listed in Table 5.1 (page 492) of the textbook, and properties of the z-transform. Moreover, notice that -1 = ejt. TABLE 5.1 Select (Unilateral) Z-Transform Pairs x[n] X[z] 8[n-k] ? 2-1 ոս[ո] (z - 1) z(z+1) (2-1)3 nºu[n] nu[n] z(z? + 4z +1) (2-1) Yºu[n] yn-u[n- 1] z-y 12 ny"u[n] (z-7) yz(z+y) (z-7)3 ny"u[n] n(n - 1)(n-2) (n-m+1) ym! lyl" cos...
Problem 5. Determine the z-transform of the signal x[n] :=(-1)"nu[n]. You may use already known z-transforms, such as those listed in Table 5.1 (page 492) of the textbook, and properties of the z-transform. Moreover, notice that -1 = ejt. TABLE 5.1 Select (Unilateral) Z-Transform Pairs x[n] X[z] 8[n-k] ? 2-1 ոս[ո] (z - 1) z(z+1) (2-1)3 nºu[n] nu[n] z(z? + 4z +1) (2-1) Yºu[n] yn-u[n- 1] z-y 12 ny"u[n] (z-7) yz(z+y) (z-7)3 ny"u[n] n(n - 1)(n-2) (n-m+1) ym! lyl" cos...
 A causal and stable LTI system has the property that:
〖(4/5)〗^n u(n) →n 〖(4/5)〗^n u(n)
Determine the frequency response H(e^jω) for the system.
Determine a difference equation relating any input x(n) and
the corresponding output y(n).
Question 3:[4 Marks] A causal and stable LTI system has the property that: 4 4 a) Determine the frequency response H(e/ø) for the system. b) Determine a difference equation relating any input x(n) and the corresponding output y(n)
A causal and stable LTI system has the property that:
〖(4/5)〗^n u(n) →n 〖(4/5)〗^n u(n)
Determine the frequency response H(e^jω) for the system.
Determine a difference equation relating any input x(n) and
the corresponding output y(n).
Question 3:[4 Marks] A causal and stable LTI system has the property that: 4 4 a) Determine the frequency response H(e/ø) for the system. b) Determine a difference equation relating any input x(n) and the corresponding output y(n)
 Question 3 (30 marks) Consider the digital filter structure shown in the below figure: x[n yIn] 3 (a) Transform the given block diagram to the transposed direct form II one. 2 (b) Determine the difference-equation representation of the system 4 (c) Find the transfer function for this causal filter and state the pole-zero pattern (d) Determine the impulse response of the system 2 (e) For what values of k is the system stable? (f) Determine yln if k 1 and...
Question 3 (30 marks) Consider the digital filter structure shown in the below figure: x[n yIn] 3 (a) Transform the given block diagram to the transposed direct form II one. 2 (b) Determine the difference-equation representation of the system 4 (c) Find the transfer function for this causal filter and state the pole-zero pattern (d) Determine the impulse response of the system 2 (e) For what values of k is the system stable? (f) Determine yln if k 1 and...
 where M=7
322-M2 4) Find the inverse - transform of F(z) = (2-1)(2-2M)' (15 marks) 0 t<-M/2 M <t< - 5) Show that the Fourier transform of function f(t) sin 7 s (10 marks) au 6) Show that u = ln(x2 + xy + y2) satisfies the partial differential equation x x ди +y 2. (7 marks) au 7) Solve the partial differential equation = e-cos(x) where at du x = 0, at =tet ax at and t = 0,...
where M=7
322-M2 4) Find the inverse - transform of F(z) = (2-1)(2-2M)' (15 marks) 0 t<-M/2 M <t< - 5) Show that the Fourier transform of function f(t) sin 7 s (10 marks) au 6) Show that u = ln(x2 + xy + y2) satisfies the partial differential equation x x ди +y 2. (7 marks) au 7) Solve the partial differential equation = e-cos(x) where at du x = 0, at =tet ax at and t = 0,...
 Use the Z-transform to find the general solution (zero-input and zero-state) for the following linear recursive difference equation written in advanced form: y[n+2] +3y[n+1]+2y[n] = 2x[n+2] A. Use the Z-transform to find the zero-input solution with initial conditions: y[-2]=2, and y(-1)=3 B. Use the Z-transform to find the zero-state solution if the source function is given by, x[n]=3" u[n] C. Write the general solution to the linear recursive difference equation D. Use the Z-transform to find the transfer function (H(z))...
Use the Z-transform to find the general solution (zero-input and zero-state) for the following linear recursive difference equation written in advanced form: y[n+2] +3y[n+1]+2y[n] = 2x[n+2] A. Use the Z-transform to find the zero-input solution with initial conditions: y[-2]=2, and y(-1)=3 B. Use the Z-transform to find the zero-state solution if the source function is given by, x[n]=3" u[n] C. Write the general solution to the linear recursive difference equation D. Use the Z-transform to find the transfer function (H(z))...
 1. An LTI digital system with impulse response h[n] = 2(1/4)"u[n] produces an output y[n] = (-3)"u[n]. Determine the corresponding input x[n] using Z-transform. (30 points)
1. An LTI digital system with impulse response h[n] = 2(1/4)"u[n] produces an output y[n] = (-3)"u[n]. Determine the corresponding input x[n] using Z-transform. (30 points)
 7. A causal LTI system has a transfer function given by H (z) = -1 (1 4 The input to the system is x[n] = (0.5)"u[n] + u[-n-1] ) Find the impulse response of the system b) Determine the difference equation that describes the system. c) Find the output y[n]. d) Is the system stable?
7. A causal LTI system has a transfer function given by H (z) = -1 (1 4 The input to the system is x[n] = (0.5)"u[n] + u[-n-1] ) Find the impulse response of the system b) Determine the difference equation that describes the system. c) Find the output y[n]. d) Is the system stable?
 Suppose the signal x[n] = δ[n-1] + cos(nn/6+ π/4) is input to the LTI system described by the equation y[n][n] +r|n - 0.5yn -. Determine a closed-form expression for yn]
Suppose the signal x[n] = δ[n-1] + cos(nn/6+ π/4) is input to the LTI system described by the equation y[n][n] +r|n - 0.5yn -. Determine a closed-form expression for yn]
Suppose the signal x[n] = δ[n-1] + cos(nn/6+ π/4) is input to the LTI system described by the equation y[n][n] +r|n - 0.5yn -. Determine a closed-form expression for yn]
Suppose the signal x[n] = δ[n-1] + cos(nn/6+ π/4) is input to the LTI system described by the equation y[n][n] +r|n - 0.5yn -. Determine a closed-form expression for yn]
Most questions answered within 3 hours.
-
Suppose that you know that in the population of full-time
employees in the United States, the...
asked 3 minutes ago -
This experiment was designed originally to sample various meat and carcass quality
aspects of Ontario pigs...
asked 3 minutes ago -
) Raw materials are studied for contamination. Suppose that
the number of particles of contamination per...
asked 17 minutes ago -
After running a regression analysis we calculated an F test and
the significance level was 0.15....
asked 13 minutes ago -
----Can someone please help me solve this one using JAVA
----I thank you in advance
Create...
asked 18 minutes ago -
1. What force primarily attracts the potassium ion to
the nitrate ion?
a. London forces...
asked 19 minutes ago -
What are the negative effects of abruptly stopping the use of
all fossil fuels? Give at...
asked 26 minutes ago -
Given that many conflict are the result of different parties having
different interests, is it possible...
asked 31 minutes ago -
A 750 g block can slide uniformly along the horizontal track
when a string attached to...
asked 34 minutes ago -
In 2017, Juan entered into a contract to write a book. The
publisher advanced Juan $50,000,...
asked 48 minutes ago -
Determine the number of kinds of protons in each molecule (w/
respect to NMR spectroscopy). Drawing...
asked 58 minutes ago -
A jeweler whose near point is 68 cm from his eye uses a
magnifying glass as...
asked 56 minutes ago