
Homework Answers




matlab:
clc;
clear all;
close all;
s=tf('s');
g=(s^2+16*s+128)/((s+1)*(s+4)*(s+8)*(s^2+12*s+52));
k=21.7685;
rlocus(g);
figure
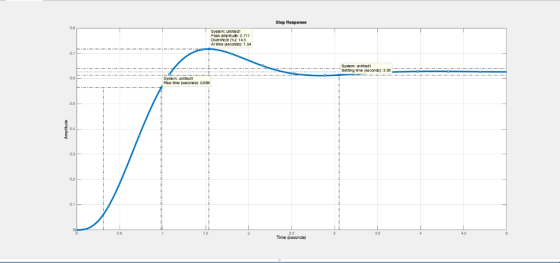
step(feedback(k*g,1));grid

Add Answer to:
Y(s) s216 s 128 R(s) k (s212 s52) (s 1) (s + 4) (s +8) We desire the dominant roots to have damping ratio equal to 0.5....
Consider the same plant G(s) Design a controller so that if you desire an angle of...
 Consider the same plant G(s) Design a controller so that if you desire an angle of r 1 rad, s(s+10) (s+20) (R the actual angle of the motor y(t) has an overshoot less than or equal to 20% and a settling time less than or equal to 0.3s as it is settling down to the steady state angle. Write down the steps you followed in the sisotool (or otherwise), include: i. ii. iii. iv. Your error calculations and calculations for...
Consider the same plant G(s) Design a controller so that if you desire an angle of r 1 rad, s(s+10) (s+20) (R the actual angle of the motor y(t) has an overshoot less than or equal to 20% and a settling time less than or equal to 0.3s as it is settling down to the steady state angle. Write down the steps you followed in the sisotool (or otherwise), include: i. ii. iii. iv. Your error calculations and calculations for...
3 .0.2) 0(z) ℉.20-1011,. +20s+101)(s+20) 20), the damping ratio for the dominant Problem 2: For a...
 3 .0.2) 0(z) ℉.20-1011,. +20s+101)(s+20) 20), the damping ratio for the dominant Problem 2: For a unity feedback system with closed loop poles is to be 0.4, and the settling time is to be 0.5 second for the compensated system. a. b. c. d. Find the coordinates of the dominant poles. Find the location of the compensator zero if the compensator pole is at -15 (lead compensator) Find the required system gain. Compare the performance of the uncompensated and compensated...
3 .0.2) 0(z) ℉.20-1011,. +20s+101)(s+20) 20), the damping ratio for the dominant Problem 2: For a unity feedback system with closed loop poles is to be 0.4, and the settling time is to be 0.5 second for the compensated system. a. b. c. d. Find the coordinates of the dominant poles. Find the location of the compensator zero if the compensator pole is at -15 (lead compensator) Find the required system gain. Compare the performance of the uncompensated and compensated...
I have no more posting for this month, please solve these for me thanks 1. Given...
 I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
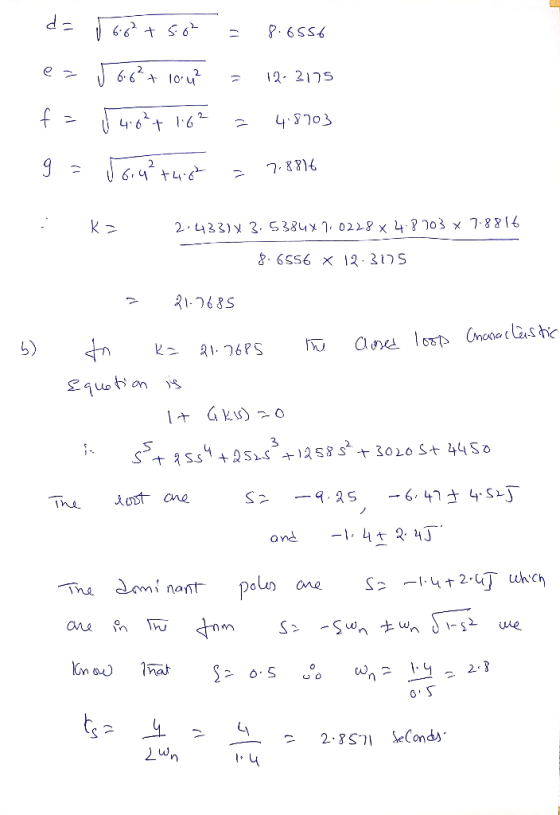
Y(s) s216 s 128 (s212 s 52) (s +1) (s + 4) (s +8) R(s) For the given system above, Sketch the root locus. Procedures Sh...
 Y(s) s216 s 128 (s212 s 52) (s +1) (s + 4) (s +8) R(s) For the given system above, Sketch the root locus. Procedures Show all the steps of calculation manually Show the imaginary axis intersection points if they exist Show the break away and entry points if they exist. Show the departure and arrival angles if they exist Check by MATLAB the root locus sketch Use MATLAB to simplify your calculations o +
Y(s) s216 s 128 (s212...
Y(s) s216 s 128 (s212 s 52) (s +1) (s + 4) (s +8) R(s) For the given system above, Sketch the root locus. Procedures Show all the steps of calculation manually Show the imaginary axis intersection points if they exist Show the break away and entry points if they exist. Show the departure and arrival angles if they exist Check by MATLAB the root locus sketch Use MATLAB to simplify your calculations o +
Y(s) s216 s 128 (s212...
Steam-driven power generators rotate at a constant speed via a governor that maintains constant s...
 Steam-driven power generators rotate at a constant speed via a governor that maintains constant steam pressure in the turbine. In addition, automatic generation control (AGC) or load frequency control (LFC) is added to ensure reliability and consistency despite load variations or other disturbances that can affect the distribution line frequency output. A specific turbine- governor system can be described only using the block diagram below, in which G (s)- Gg (s)G(s)Gm(s), where is the governor's transfer function 0.2s+1 G.(s)s the...
Steam-driven power generators rotate at a constant speed via a governor that maintains constant steam pressure in the turbine. In addition, automatic generation control (AGC) or load frequency control (LFC) is added to ensure reliability and consistency despite load variations or other disturbances that can affect the distribution line frequency output. A specific turbine- governor system can be described only using the block diagram below, in which G (s)- Gg (s)G(s)Gm(s), where is the governor's transfer function 0.2s+1 G.(s)s the...
Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%....
 Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
Problem 2 Wis) R(s) U(s) Gol (s) D a (s) E(s) H(s) Given a system as in the diagram above, use MATLAB to solve the problems: Assume we want the closed-loop system rise time to be t, 0.18 sec S + Z H(...
 Problem 2 Wis) R(s) U(s) Gol (s) D a (s) E(s) H(s) Given a system as in the diagram above, use MATLAB to solve the problems: Assume we want the closed-loop system rise time to be t, 0.18 sec S + Z H(s) 1 Gpl)s(s+)et s(s 1) s + p a) Assume W(s)-0. Draw the root locus of the system assuming compensator consists only of the adjustable gain parameter K, i.e. Dct (s) Determine the approximate range of values of...
Problem 2 Wis) R(s) U(s) Gol (s) D a (s) E(s) H(s) Given a system as in the diagram above, use MATLAB to solve the problems: Assume we want the closed-loop system rise time to be t, 0.18 sec S + Z H(s) 1 Gpl)s(s+)et s(s 1) s + p a) Assume W(s)-0. Draw the root locus of the system assuming compensator consists only of the adjustable gain parameter K, i.e. Dct (s) Determine the approximate range of values of...
For the closed-loop system shown, and given: C(s) 8.41 s+8.10 G(8 2 0.02 3.00 2out G(s) C(s) control plant Part A-Plant 1% settling time Find the 1% settling time of the plant G(s) to a unit step inp...
 For the closed-loop system shown, and given: C(s) 8.41 s+8.10 G(8 2 0.02 3.00 2out G(s) C(s) control plant Part A-Plant 1% settling time Find the 1% settling time of the plant G(s) to a unit step input. 15.38 t,3% - Submit X ncorrect; Try Again - Part B Plant: Overshoot Find the overshoot of the plant G(s)to a unit step input. Give your answer as a percentage Mp: | Value Units Submit Request Answer Part C - Closed-loop system:...
For the closed-loop system shown, and given: C(s) 8.41 s+8.10 G(8 2 0.02 3.00 2out G(s) C(s) control plant Part A-Plant 1% settling time Find the 1% settling time of the plant G(s) to a unit step input. 15.38 t,3% - Submit X ncorrect; Try Again - Part B Plant: Overshoot Find the overshoot of the plant G(s)to a unit step input. Give your answer as a percentage Mp: | Value Units Submit Request Answer Part C - Closed-loop system:...
C(s) G(s) Figure 1: A block diagram for Problems 1-4 For the given unity feedback system with G(s...
 C(s) G(s) Figure 1: A block diagram for Problems 1-4 For the given unity feedback system with G(s) - s 5)3' (a) Find the location of the dominant poles to yield a 1.2 second settling time and overshoot of 15% (b) If a compensator with a zero at-1 is used to achieve the conditions of Part a, what must be the angular contribution of the compensator pole be? (c) Find the location of the compensator pole. (d) Find the gain...
C(s) G(s) Figure 1: A block diagram for Problems 1-4 For the given unity feedback system with G(s) - s 5)3' (a) Find the location of the dominant poles to yield a 1.2 second settling time and overshoot of 15% (b) If a compensator with a zero at-1 is used to achieve the conditions of Part a, what must be the angular contribution of the compensator pole be? (c) Find the location of the compensator pole. (d) Find the gain...
You are given an unstable plant with a transfer function P(s) = Tote -1 R(S) Y(8)...
 You are given an unstable plant with a transfer function P(s) = Tote -1 R(S) Y(8) 11+ C(8) P(s) You are to design a proportional controller, C(s) = K, such that the closed-loop system is BIBO stable and meets the following performance specifications: (i) Rise time T, < 0.5 seconds (where T, = 28) (ii) Percent overshoot %OS < 50%. Do the following: (a) Sketch the region in the complex plane where you would like the poles of the closed-loop...
You are given an unstable plant with a transfer function P(s) = Tote -1 R(S) Y(8) 11+ C(8) P(s) You are to design a proportional controller, C(s) = K, such that the closed-loop system is BIBO stable and meets the following performance specifications: (i) Rise time T, < 0.5 seconds (where T, = 28) (ii) Percent overshoot %OS < 50%. Do the following: (a) Sketch the region in the complex plane where you would like the poles of the closed-loop...
 Consider the same plant G(s) Design a controller so that if you desire an angle of r 1 rad, s(s+10) (s+20) (R the actual angle of the motor y(t) has an overshoot less than or equal to 20% and a settling time less than or equal to 0.3s as it is settling down to the steady state angle. Write down the steps you followed in the sisotool (or otherwise), include: i. ii. iii. iv. Your error calculations and calculations for...
Consider the same plant G(s) Design a controller so that if you desire an angle of r 1 rad, s(s+10) (s+20) (R the actual angle of the motor y(t) has an overshoot less than or equal to 20% and a settling time less than or equal to 0.3s as it is settling down to the steady state angle. Write down the steps you followed in the sisotool (or otherwise), include: i. ii. iii. iv. Your error calculations and calculations for...
 3 .0.2) 0(z) ℉.20-1011,. +20s+101)(s+20) 20), the damping ratio for the dominant Problem 2: For a unity feedback system with closed loop poles is to be 0.4, and the settling time is to be 0.5 second for the compensated system. a. b. c. d. Find the coordinates of the dominant poles. Find the location of the compensator zero if the compensator pole is at -15 (lead compensator) Find the required system gain. Compare the performance of the uncompensated and compensated...
3 .0.2) 0(z) ℉.20-1011,. +20s+101)(s+20) 20), the damping ratio for the dominant Problem 2: For a unity feedback system with closed loop poles is to be 0.4, and the settling time is to be 0.5 second for the compensated system. a. b. c. d. Find the coordinates of the dominant poles. Find the location of the compensator zero if the compensator pole is at -15 (lead compensator) Find the required system gain. Compare the performance of the uncompensated and compensated...
 I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
 Y(s) s216 s 128 (s212 s 52) (s +1) (s + 4) (s +8) R(s) For the given system above, Sketch the root locus. Procedures Show all the steps of calculation manually Show the imaginary axis intersection points if they exist Show the break away and entry points if they exist. Show the departure and arrival angles if they exist Check by MATLAB the root locus sketch Use MATLAB to simplify your calculations o +
Y(s) s216 s 128 (s212...
Y(s) s216 s 128 (s212 s 52) (s +1) (s + 4) (s +8) R(s) For the given system above, Sketch the root locus. Procedures Show all the steps of calculation manually Show the imaginary axis intersection points if they exist Show the break away and entry points if they exist. Show the departure and arrival angles if they exist Check by MATLAB the root locus sketch Use MATLAB to simplify your calculations o +
Y(s) s216 s 128 (s212...
 Steam-driven power generators rotate at a constant speed via a governor that maintains constant steam pressure in the turbine. In addition, automatic generation control (AGC) or load frequency control (LFC) is added to ensure reliability and consistency despite load variations or other disturbances that can affect the distribution line frequency output. A specific turbine- governor system can be described only using the block diagram below, in which G (s)- Gg (s)G(s)Gm(s), where is the governor's transfer function 0.2s+1 G.(s)s the...
Steam-driven power generators rotate at a constant speed via a governor that maintains constant steam pressure in the turbine. In addition, automatic generation control (AGC) or load frequency control (LFC) is added to ensure reliability and consistency despite load variations or other disturbances that can affect the distribution line frequency output. A specific turbine- governor system can be described only using the block diagram below, in which G (s)- Gg (s)G(s)Gm(s), where is the governor's transfer function 0.2s+1 G.(s)s the...
 Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
 Problem 2 Wis) R(s) U(s) Gol (s) D a (s) E(s) H(s) Given a system as in the diagram above, use MATLAB to solve the problems: Assume we want the closed-loop system rise time to be t, 0.18 sec S + Z H(s) 1 Gpl)s(s+)et s(s 1) s + p a) Assume W(s)-0. Draw the root locus of the system assuming compensator consists only of the adjustable gain parameter K, i.e. Dct (s) Determine the approximate range of values of...
Problem 2 Wis) R(s) U(s) Gol (s) D a (s) E(s) H(s) Given a system as in the diagram above, use MATLAB to solve the problems: Assume we want the closed-loop system rise time to be t, 0.18 sec S + Z H(s) 1 Gpl)s(s+)et s(s 1) s + p a) Assume W(s)-0. Draw the root locus of the system assuming compensator consists only of the adjustable gain parameter K, i.e. Dct (s) Determine the approximate range of values of...
 For the closed-loop system shown, and given: C(s) 8.41 s+8.10 G(8 2 0.02 3.00 2out G(s) C(s) control plant Part A-Plant 1% settling time Find the 1% settling time of the plant G(s) to a unit step input. 15.38 t,3% - Submit X ncorrect; Try Again - Part B Plant: Overshoot Find the overshoot of the plant G(s)to a unit step input. Give your answer as a percentage Mp: | Value Units Submit Request Answer Part C - Closed-loop system:...
For the closed-loop system shown, and given: C(s) 8.41 s+8.10 G(8 2 0.02 3.00 2out G(s) C(s) control plant Part A-Plant 1% settling time Find the 1% settling time of the plant G(s) to a unit step input. 15.38 t,3% - Submit X ncorrect; Try Again - Part B Plant: Overshoot Find the overshoot of the plant G(s)to a unit step input. Give your answer as a percentage Mp: | Value Units Submit Request Answer Part C - Closed-loop system:...
 C(s) G(s) Figure 1: A block diagram for Problems 1-4 For the given unity feedback system with G(s) - s 5)3' (a) Find the location of the dominant poles to yield a 1.2 second settling time and overshoot of 15% (b) If a compensator with a zero at-1 is used to achieve the conditions of Part a, what must be the angular contribution of the compensator pole be? (c) Find the location of the compensator pole. (d) Find the gain...
C(s) G(s) Figure 1: A block diagram for Problems 1-4 For the given unity feedback system with G(s) - s 5)3' (a) Find the location of the dominant poles to yield a 1.2 second settling time and overshoot of 15% (b) If a compensator with a zero at-1 is used to achieve the conditions of Part a, what must be the angular contribution of the compensator pole be? (c) Find the location of the compensator pole. (d) Find the gain...
 You are given an unstable plant with a transfer function P(s) = Tote -1 R(S) Y(8) 11+ C(8) P(s) You are to design a proportional controller, C(s) = K, such that the closed-loop system is BIBO stable and meets the following performance specifications: (i) Rise time T, < 0.5 seconds (where T, = 28) (ii) Percent overshoot %OS < 50%. Do the following: (a) Sketch the region in the complex plane where you would like the poles of the closed-loop...
You are given an unstable plant with a transfer function P(s) = Tote -1 R(S) Y(8) 11+ C(8) P(s) You are to design a proportional controller, C(s) = K, such that the closed-loop system is BIBO stable and meets the following performance specifications: (i) Rise time T, < 0.5 seconds (where T, = 28) (ii) Percent overshoot %OS < 50%. Do the following: (a) Sketch the region in the complex plane where you would like the poles of the closed-loop...
Most questions answered within 3 hours.
-
a)
The following table shows the profile, by the math section of
the SAT Reasoning Test,...
asked 13 minutes ago -
A single loop of aluminum wire, lying flat in a plane, has an
area of 7.80...
asked 5 minutes ago -
A fair die is rolled. What is the probability of the dice coming
up a one...
asked 9 minutes ago -
A car drives over the crest of a hill of radius 120m with a
speed of...
asked 28 minutes ago -
Implementation of a MapReduce-style distributed word count
application
For this assignment, you can use any programming...
asked 36 minutes ago -
In females, the labia swells and the vagin-a lubricates during
which phase of the sexual response...
asked 1 hour ago -
2. An item costs a retailer $200. If a 30 percent markup is
desired, what should...
asked 1 hour ago -
Your client, Anita, is hurt in a car accident and comes to you
for some advice....
asked 1 hour ago -
how many mL of 0.1050 M NaOH is needed to reach a pH of 3.74
when...
asked 1 hour ago -
QUESTION
Memory retrieval that is easier when the person is in the same
psychological condition during...
asked 1 hour ago -
The mean annual inflation rate in the UNited States over the
past 98 years in 3.37%...
asked 1 hour ago -
Design a class Holiday that represents a
holiday during the year. This class has three
private...
asked 1 hour ago