
Homework Answers
Add Answer to:
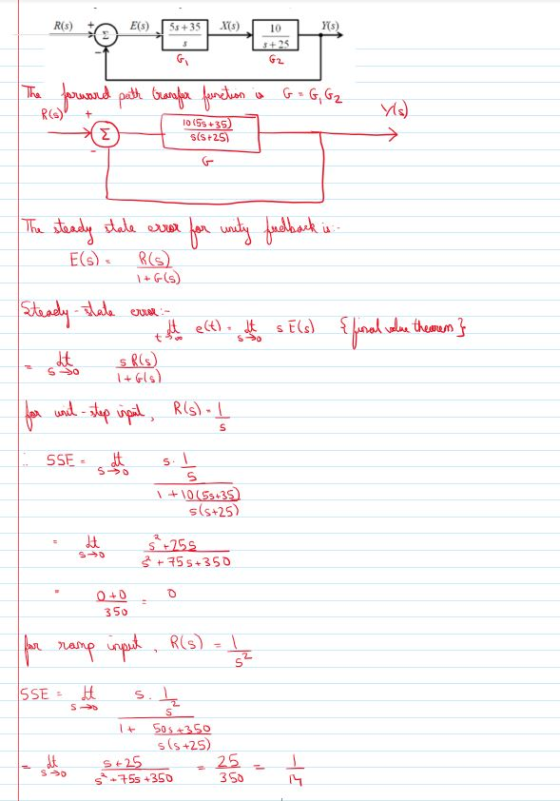
Consider the closed-loop feedback control system with a PI-controller, shown below. Compute the steady-state error using...
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the control...
 Please solve as a MATLAB code.
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the controller is given by G (s) 2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for (t) at. Here a 0.5°/s. Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G (s) with the following controller This is a Proportional-Integral (PI) controller. Repeat part...
Please solve as a MATLAB code.
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the controller is given by G (s) 2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for (t) at. Here a 0.5°/s. Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G (s) with the following controller This is a Proportional-Integral (PI) controller. Repeat part...
PROBLEM 4 A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the lsim function of MATLAB, calculate and obtain the g...
 PROBLEM 4 A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for 0,(1)-a. Here a ; 0.5%, Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G. (s) with the following controller: K2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence...
PROBLEM 4 A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for 0,(1)-a. Here a ; 0.5%, Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G. (s) with the following controller: K2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence...
Problem 1: Steady-state error analvsis (a) A block diagram of a feedback control system is given ...
 The Class Name is: MAE 318 System Dynamics and Control I
Problem 1: Steady-state error analvsis (a) A block diagram of a feedback control system is given below. Assuming that the tunable constant Khas a value that makes this closed-loop system stable, find the steady-state error of the closed-loop system for (a a step reference input with amplitude R, r(t)- R u(t) (ii) a ramp reference input with slope R, r(t) = Rt-us(t) R(s) Y(s) (s+2)(s +5) (b) A block...
The Class Name is: MAE 318 System Dynamics and Control I
Problem 1: Steady-state error analvsis (a) A block diagram of a feedback control system is given below. Assuming that the tunable constant Khas a value that makes this closed-loop system stable, find the steady-state error of the closed-loop system for (a a step reference input with amplitude R, r(t)- R u(t) (ii) a ramp reference input with slope R, r(t) = Rt-us(t) R(s) Y(s) (s+2)(s +5) (b) A block...
1. A feedback control system is shown in the figure below. Suppose that our design objective...
 1. A feedback control system is shown in the figure below. Suppose that our design objective is to find a controller Gc(S) of minimal complexity such that our closed-loop system can track a unit step input with a steady-state error of zero. (b) Now consider a more complex controller Gc(S) = [ Ko + K//s] where Ko = 2 and Ki = 20. (This is a proportional + integral (PI) controller). Plot the unit step response, and determine the steady-state...
1. A feedback control system is shown in the figure below. Suppose that our design objective is to find a controller Gc(S) of minimal complexity such that our closed-loop system can track a unit step input with a steady-state error of zero. (b) Now consider a more complex controller Gc(S) = [ Ko + K//s] where Ko = 2 and Ki = 20. (This is a proportional + integral (PI) controller). Plot the unit step response, and determine the steady-state...
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller trans...
 Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
6 and controller C(s), as shown in the Consider a unity-feedback control system with plant G(s)-...
 6 and controller C(s), as shown in the Consider a unity-feedback control system with plant G(s)- following figure. Reference Error Controller Plant r(t) e(t) u(t) y(t) C(s) G(s) [5] (a) Determine the poles, zeros, order, type, relative degree, and de gain of the plant G(s) and show [5] (b) Can a P controller C(s)Kp stabilize the plant G(s)? If so, find the values of Kp that are [4] (c) Show using the Final Value Theorem that the system with the...
6 and controller C(s), as shown in the Consider a unity-feedback control system with plant G(s)- following figure. Reference Error Controller Plant r(t) e(t) u(t) y(t) C(s) G(s) [5] (a) Determine the poles, zeros, order, type, relative degree, and de gain of the plant G(s) and show [5] (b) Can a P controller C(s)Kp stabilize the plant G(s)? If so, find the values of Kp that are [4] (c) Show using the Final Value Theorem that the system with the...
17 Question: According to Ideal closed feedback control system, the value of steady state error is:...
 17 Question: According to Ideal closed feedback control system, the value of steady state error is: (1 Point) Enter your answer
17 Question: According to Ideal closed feedback control system, the value of steady state error is: (1 Point) Enter your answer
PLEASE solve it with MATLAB code A unity feedback closed loop control system is displayed in...
 PLEASE solve it with MATLAB code
A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the Isim function of MATLAB, calculate and obtain the graph of the response for 6, (t)-at. Here a : 0.5%, Find the height error after 10 seconds, G) -2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence of Pl controller, and juxtapose the steady state error...
PLEASE solve it with MATLAB code
A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the Isim function of MATLAB, calculate and obtain the graph of the response for 6, (t)-at. Here a : 0.5%, Find the height error after 10 seconds, G) -2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence of Pl controller, and juxtapose the steady state error...
1. [25%] Consider the closed-loop system shown where it is desired to stabilize the system with...
 1. [25%] Consider the closed-loop system shown where it is desired to stabilize the system with feedback where the control law is a form of a PID controller. Design using the Root Locus Method such that the: a. percent overshoot is less than 10% for a unit step b. settling time is less than 4 seconds, c. steady-state absolute error (not percent error) due to a unit ramp input (r=t) is less than 1. d. Note: The actuator u(t) saturates...
1. [25%] Consider the closed-loop system shown where it is desired to stabilize the system with feedback where the control law is a form of a PID controller. Design using the Root Locus Method such that the: a. percent overshoot is less than 10% for a unit step b. settling time is less than 4 seconds, c. steady-state absolute error (not percent error) due to a unit ramp input (r=t) is less than 1. d. Note: The actuator u(t) saturates...
3. Consider the system It is desired to design an output feedback controller such that all closed-loop eigenvalues sati...
 3. Consider the system It is desired to design an output feedback controller such that all closed-loop eigenvalues satisfy R, [A S-3 and the output y is to track a constant reference r. (a) Design the controller using the feedback compensator method. (b) Design the controller using the integral-control method.
3. Consider the system It is desired to design an output feedback controller such that all closed-loop eigenvalues satisfy R, [A S-3 and the output y is to track a...
3. Consider the system It is desired to design an output feedback controller such that all closed-loop eigenvalues satisfy R, [A S-3 and the output y is to track a constant reference r. (a) Design the controller using the feedback compensator method. (b) Design the controller using the integral-control method.
3. Consider the system It is desired to design an output feedback controller such that all closed-loop eigenvalues satisfy R, [A S-3 and the output y is to track a...
 Please solve as a MATLAB code.
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the controller is given by G (s) 2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for (t) at. Here a 0.5°/s. Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G (s) with the following controller This is a Proportional-Integral (PI) controller. Repeat part...
Please solve as a MATLAB code.
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the controller is given by G (s) 2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for (t) at. Here a 0.5°/s. Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G (s) with the following controller This is a Proportional-Integral (PI) controller. Repeat part...
 PROBLEM 4 A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for 0,(1)-a. Here a ; 0.5%, Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G. (s) with the following controller: K2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence...
PROBLEM 4 A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for 0,(1)-a. Here a ; 0.5%, Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G. (s) with the following controller: K2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence...
 The Class Name is: MAE 318 System Dynamics and Control I
Problem 1: Steady-state error analvsis (a) A block diagram of a feedback control system is given below. Assuming that the tunable constant Khas a value that makes this closed-loop system stable, find the steady-state error of the closed-loop system for (a a step reference input with amplitude R, r(t)- R u(t) (ii) a ramp reference input with slope R, r(t) = Rt-us(t) R(s) Y(s) (s+2)(s +5) (b) A block...
The Class Name is: MAE 318 System Dynamics and Control I
Problem 1: Steady-state error analvsis (a) A block diagram of a feedback control system is given below. Assuming that the tunable constant Khas a value that makes this closed-loop system stable, find the steady-state error of the closed-loop system for (a a step reference input with amplitude R, r(t)- R u(t) (ii) a ramp reference input with slope R, r(t) = Rt-us(t) R(s) Y(s) (s+2)(s +5) (b) A block...
 1. A feedback control system is shown in the figure below. Suppose that our design objective is to find a controller Gc(S) of minimal complexity such that our closed-loop system can track a unit step input with a steady-state error of zero. (b) Now consider a more complex controller Gc(S) = [ Ko + K//s] where Ko = 2 and Ki = 20. (This is a proportional + integral (PI) controller). Plot the unit step response, and determine the steady-state...
1. A feedback control system is shown in the figure below. Suppose that our design objective is to find a controller Gc(S) of minimal complexity such that our closed-loop system can track a unit step input with a steady-state error of zero. (b) Now consider a more complex controller Gc(S) = [ Ko + K//s] where Ko = 2 and Ki = 20. (This is a proportional + integral (PI) controller). Plot the unit step response, and determine the steady-state...
 Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
 6 and controller C(s), as shown in the Consider a unity-feedback control system with plant G(s)- following figure. Reference Error Controller Plant r(t) e(t) u(t) y(t) C(s) G(s) [5] (a) Determine the poles, zeros, order, type, relative degree, and de gain of the plant G(s) and show [5] (b) Can a P controller C(s)Kp stabilize the plant G(s)? If so, find the values of Kp that are [4] (c) Show using the Final Value Theorem that the system with the...
6 and controller C(s), as shown in the Consider a unity-feedback control system with plant G(s)- following figure. Reference Error Controller Plant r(t) e(t) u(t) y(t) C(s) G(s) [5] (a) Determine the poles, zeros, order, type, relative degree, and de gain of the plant G(s) and show [5] (b) Can a P controller C(s)Kp stabilize the plant G(s)? If so, find the values of Kp that are [4] (c) Show using the Final Value Theorem that the system with the...
 17 Question: According to Ideal closed feedback control system, the value of steady state error is: (1 Point) Enter your answer
17 Question: According to Ideal closed feedback control system, the value of steady state error is: (1 Point) Enter your answer
 PLEASE solve it with MATLAB code
A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the Isim function of MATLAB, calculate and obtain the graph of the response for 6, (t)-at. Here a : 0.5%, Find the height error after 10 seconds, G) -2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence of Pl controller, and juxtapose the steady state error...
PLEASE solve it with MATLAB code
A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the Isim function of MATLAB, calculate and obtain the graph of the response for 6, (t)-at. Here a : 0.5%, Find the height error after 10 seconds, G) -2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence of Pl controller, and juxtapose the steady state error...
 1. [25%] Consider the closed-loop system shown where it is desired to stabilize the system with feedback where the control law is a form of a PID controller. Design using the Root Locus Method such that the: a. percent overshoot is less than 10% for a unit step b. settling time is less than 4 seconds, c. steady-state absolute error (not percent error) due to a unit ramp input (r=t) is less than 1. d. Note: The actuator u(t) saturates...
1. [25%] Consider the closed-loop system shown where it is desired to stabilize the system with feedback where the control law is a form of a PID controller. Design using the Root Locus Method such that the: a. percent overshoot is less than 10% for a unit step b. settling time is less than 4 seconds, c. steady-state absolute error (not percent error) due to a unit ramp input (r=t) is less than 1. d. Note: The actuator u(t) saturates...
 3. Consider the system It is desired to design an output feedback controller such that all closed-loop eigenvalues satisfy R, [A S-3 and the output y is to track a constant reference r. (a) Design the controller using the feedback compensator method. (b) Design the controller using the integral-control method.
3. Consider the system It is desired to design an output feedback controller such that all closed-loop eigenvalues satisfy R, [A S-3 and the output y is to track a...
3. Consider the system It is desired to design an output feedback controller such that all closed-loop eigenvalues satisfy R, [A S-3 and the output y is to track a constant reference r. (a) Design the controller using the feedback compensator method. (b) Design the controller using the integral-control method.
3. Consider the system It is desired to design an output feedback controller such that all closed-loop eigenvalues satisfy R, [A S-3 and the output y is to track a...
Most questions answered within 3 hours.
-
Write a function named getComputerinfo that displays disk usage,
memory usage, the uptime, currently logged users,...
asked 9 minutes ago -
If I could have some assistance with the following questions
that would be appreciated. If I...
asked 10 minutes ago -
Under IFRS, which of the following subtotals would be shown on
an income statement if the...
asked 5 minutes ago -
_________________ is one of the algorithms that TCP uses to
control congestion inside the network. It...
asked 22 minutes ago -
Consider an arbitrary curve of fixed length C that connects the
origin and a point a...
asked 25 minutes ago -
What will be a succesful go-to-market stratergy for Rent the Runway
if they entered the UK...
asked 28 minutes ago -
Abstract This case deals with the capital budgeting techniques
of Net Present Value (i.e. NPV) and...
asked 30 minutes ago -
A general contractor
has a contract to construct the water line for a new subdivision.
The...
asked 31 minutes ago -
When data are given and ask you to confirm that they fit the
Langmuir Isotherm how...
asked 43 minutes ago -
what is a good way to compare and contrast gatorade, vitamin water,
and body armor sports...
asked 49 minutes ago -
three point charges of magnitude +2.0microcoulumbs, +3.0, +4.0
are located at the corner of a triangle...
asked 51 minutes ago -
Ecologic theories are often based on fundamental biological
processes and conditions. In the case of plants,...
asked 52 minutes ago