
Homework Answers





Add Answer to:
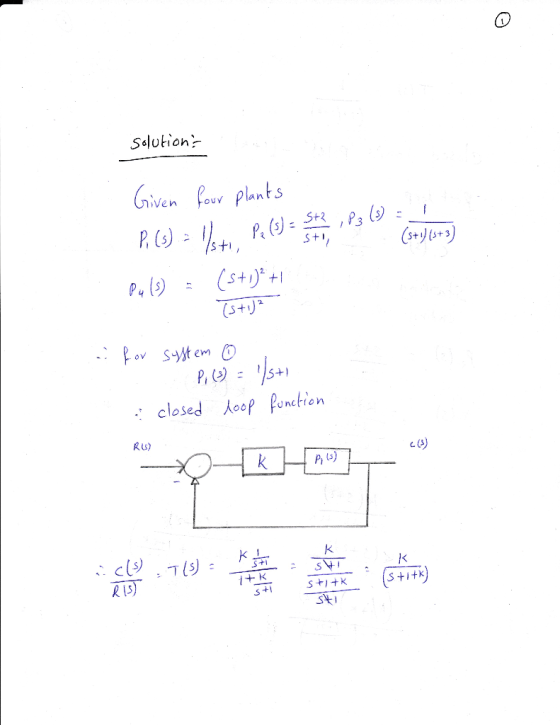
For each of the four plants below and controller given by C(s) K, find the transfer...
Theroot-locus design method (d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angle...
 Theroot-locus design method
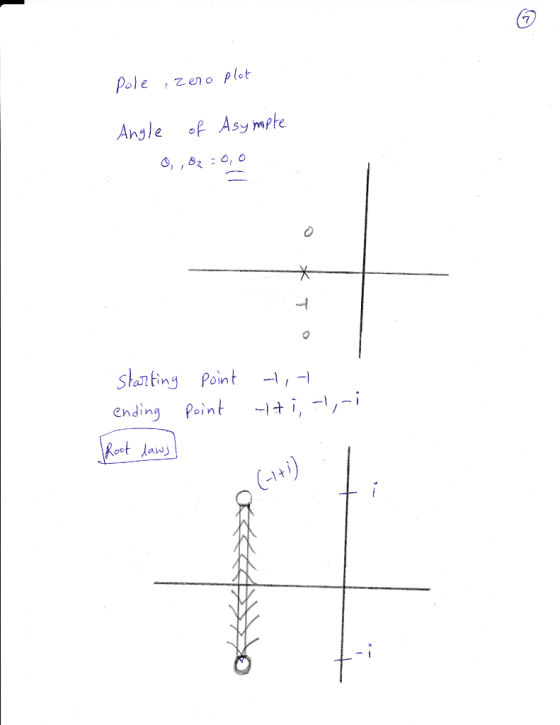
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angles. the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, respectively, and the range of k for closed-loop stability 5 10ん k(s+21
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root...
Theroot-locus design method
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angles. the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, respectively, and the range of k for closed-loop stability 5 10ん k(s+21
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root...
Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+2...
 Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+200) G(s) = Do the following using Matlab: a) Sketch the root locus. b) Find the range of gain, K that makes the system stable c) Find the value of K that yields a damping ratio of 0.707 for the system's closed-loop dominant poles. d) Obtain Ts, Tp, %OS for the closed loop system in part c). e) Find the value of K that yields...
Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+200) G(s) = Do the following using Matlab: a) Sketch the root locus. b) Find the range of gain, K that makes the system stable c) Find the value of K that yields a damping ratio of 0.707 for the system's closed-loop dominant poles. d) Obtain Ts, Tp, %OS for the closed loop system in part c). e) Find the value of K that yields...
4. A lead compensator with a transfer function Ge(s) = K(s+0.5)/(s+3) has been designed for a...
 4. A lead compensator with a transfer function Ge(s) = K(s+0.5)/(s+3) has been designed for a Space vehicle with the transfer function 1/s? such that at the dominant closed loop poles are located at -1 +/-jl. (1) What is the angle deficiency of the uncompensated system at the designed point provided by the location of the dominant poles? Show that the compensator provides the necessary lead angle at the designed point to satisfy the root locus angle criterion. (iii) What...
4. A lead compensator with a transfer function Ge(s) = K(s+0.5)/(s+3) has been designed for a Space vehicle with the transfer function 1/s? such that at the dominant closed loop poles are located at -1 +/-jl. (1) What is the angle deficiency of the uncompensated system at the designed point provided by the location of the dominant poles? Show that the compensator provides the necessary lead angle at the designed point to satisfy the root locus angle criterion. (iii) What...
5. A milling machine has the following open-loop transfer function: (s 1)(s+3) Draw a block diagram describing a negati...
 5. A milling machine has the following open-loop transfer function: (s 1)(s+3) Draw a block diagram describing a negative feedback system that includes a plant a) with transfer function of Gi(s) and a cascade proportional controller with a gain of K. b) Write the closed-loop transfer function for such a negative feedback system c The plant has poles that are solutions to P(s) 0 and zeros that are the solutions to Z(s)-0. Write an equation involving K, P(s) and Z(s)...
5. A milling machine has the following open-loop transfer function: (s 1)(s+3) Draw a block diagram describing a negative feedback system that includes a plant a) with transfer function of Gi(s) and a cascade proportional controller with a gain of K. b) Write the closed-loop transfer function for such a negative feedback system c The plant has poles that are solutions to P(s) 0 and zeros that are the solutions to Z(s)-0. Write an equation involving K, P(s) and Z(s)...
Consider a unity feedback control architecture where P(s) = 1/s^2 and C(s) = K * ((s + z)/(s + p)...
 Consider a unity feedback control architecture where P(s) =
1/s^2 and C(s) = K * ((s + z)/(s + p)) . It is desired to design
the controller to place the dominant closed-loop poles at sd = −2 ±
2j. Fix the pole of the compensator at −20 rad/sec and use root
locus techniques to find values of z and K to place the closed–loop
poles at sd .
Problem 4 (placing a zero) Consider a unity feedback control architecture...
Consider a unity feedback control architecture where P(s) =
1/s^2 and C(s) = K * ((s + z)/(s + p)) . It is desired to design
the controller to place the dominant closed-loop poles at sd = −2 ±
2j. Fix the pole of the compensator at −20 rad/sec and use root
locus techniques to find values of z and K to place the closed–loop
poles at sd .
Problem 4 (placing a zero) Consider a unity feedback control architecture...
2. Controller Design For each of the following plants G, design a compensator G, so that the closed loop system KG, G (1 + KG, G has two dominant poles near 2 ± i Plot a root locus plot for the s...
 2. Controller Design For each of the following plants G, design a compensator G, so that the closed loop system KG, G (1 + KG, G has two dominant poles near 2 ± i Plot a root locus plot for the system before adding the compensator and another plot for after. Use the simplest G that you can find. Determine the gain K that will achieve the desired poles 142
2. Controller Design For each of the following plants G,...
2. Controller Design For each of the following plants G, design a compensator G, so that the closed loop system KG, G (1 + KG, G has two dominant poles near 2 ± i Plot a root locus plot for the system before adding the compensator and another plot for after. Use the simplest G that you can find. Determine the gain K that will achieve the desired poles 142
2. Controller Design For each of the following plants G,...
4. A lead compensator with a transfer function Ge(s)=K(+0.5/(s+3) has been designed for a Space vehicle...
 4. A lead compensator with a transfer function Ge(s)=K(+0.5/(s+3) has been designed for a Space vehicle with the transfer function 1/s' such that at the dominant closed loop poles are located at -1 +/-j1. (0) What is the angle deficiency of the uncompensated system at the designed point provided by the location of the dominant poles? Show that the compensator provides the necessary lead angle at the designed point to satisfy the root locus angle criterion. What value of K...
4. A lead compensator with a transfer function Ge(s)=K(+0.5/(s+3) has been designed for a Space vehicle with the transfer function 1/s' such that at the dominant closed loop poles are located at -1 +/-j1. (0) What is the angle deficiency of the uncompensated system at the designed point provided by the location of the dominant poles? Show that the compensator provides the necessary lead angle at the designed point to satisfy the root locus angle criterion. What value of K...
1. A system with unity feedback is shown below. The feed-forward transfer function is G(s). Sketch...
 1. A system with unity feedback is shown below. The feed-forward transfer function is G(s). Sketch the root locus for the variations in the values of pi. R(9)+ 66) 69? Fig. 1: Unity-feedback closed-loop system G(s)= 100 s(s+ p) 2. The following closed-loop systems in Fig. 2 and Fig. 3 are operating with a damping ratio of 0.866 (S =0.866). The system in Fig. 2 doesn't have a PI controller, while the one in Fig. 3 does. Gain Plant R(S)...
1. A system with unity feedback is shown below. The feed-forward transfer function is G(s). Sketch the root locus for the variations in the values of pi. R(9)+ 66) 69? Fig. 1: Unity-feedback closed-loop system G(s)= 100 s(s+ p) 2. The following closed-loop systems in Fig. 2 and Fig. 3 are operating with a damping ratio of 0.866 (S =0.866). The system in Fig. 2 doesn't have a PI controller, while the one in Fig. 3 does. Gain Plant R(S)...
only b and c please 1 Consider the system whose transfer function is given by: G(S)...
 only b and c please
1 Consider the system whose transfer function is given by: G(S) == (2s +1)(s+3) unction is given by: G(s) - (a) Use the root-locus design methodology to design a lead compensator that will provide a closed-loop damping 5 =0.4 and a natural frequency on =9 rad/sec. The general transfer function for lead compensation is given by D(5)=K (977), p>z, 2=2 (b) Use MATLAB to plot the root locus of the feed-forward transfer function, D(s)*G(s), and...
only b and c please
1 Consider the system whose transfer function is given by: G(S) == (2s +1)(s+3) unction is given by: G(s) - (a) Use the root-locus design methodology to design a lead compensator that will provide a closed-loop damping 5 =0.4 and a natural frequency on =9 rad/sec. The general transfer function for lead compensation is given by D(5)=K (977), p>z, 2=2 (b) Use MATLAB to plot the root locus of the feed-forward transfer function, D(s)*G(s), and...
D9.2 Design a state-feedback controller for the following systems. Determine the controller gains, open-loop transfer functions,...
 D9.2 Design a state-feedback controller for the following systems. Determine the controller gains, open-loop transfer functions, and closed-loop transfer functions Use the open-loop transfer functions to obtain root locus, Bode plots, and gain and phase margins LU u=-kx + r Closed-loop poles at s --1tj 2
D9.2 Design a state-feedback controller for the following systems. Determine the controller gains, open-loop transfer functions, and closed-loop transfer functions Use the open-loop transfer functions to obtain root locus, Bode plots, and gain and phase margins LU u=-kx + r Closed-loop poles at s --1tj 2
 Theroot-locus design method
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angles. the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, respectively, and the range of k for closed-loop stability 5 10ん k(s+21
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root...
Theroot-locus design method
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angles. the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, respectively, and the range of k for closed-loop stability 5 10ん k(s+21
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root...
 Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+200) G(s) = Do the following using Matlab: a) Sketch the root locus. b) Find the range of gain, K that makes the system stable c) Find the value of K that yields a damping ratio of 0.707 for the system's closed-loop dominant poles. d) Obtain Ts, Tp, %OS for the closed loop system in part c). e) Find the value of K that yields...
Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+200) G(s) = Do the following using Matlab: a) Sketch the root locus. b) Find the range of gain, K that makes the system stable c) Find the value of K that yields a damping ratio of 0.707 for the system's closed-loop dominant poles. d) Obtain Ts, Tp, %OS for the closed loop system in part c). e) Find the value of K that yields...
 4. A lead compensator with a transfer function Ge(s) = K(s+0.5)/(s+3) has been designed for a Space vehicle with the transfer function 1/s? such that at the dominant closed loop poles are located at -1 +/-jl. (1) What is the angle deficiency of the uncompensated system at the designed point provided by the location of the dominant poles? Show that the compensator provides the necessary lead angle at the designed point to satisfy the root locus angle criterion. (iii) What...
4. A lead compensator with a transfer function Ge(s) = K(s+0.5)/(s+3) has been designed for a Space vehicle with the transfer function 1/s? such that at the dominant closed loop poles are located at -1 +/-jl. (1) What is the angle deficiency of the uncompensated system at the designed point provided by the location of the dominant poles? Show that the compensator provides the necessary lead angle at the designed point to satisfy the root locus angle criterion. (iii) What...
 5. A milling machine has the following open-loop transfer function: (s 1)(s+3) Draw a block diagram describing a negative feedback system that includes a plant a) with transfer function of Gi(s) and a cascade proportional controller with a gain of K. b) Write the closed-loop transfer function for such a negative feedback system c The plant has poles that are solutions to P(s) 0 and zeros that are the solutions to Z(s)-0. Write an equation involving K, P(s) and Z(s)...
5. A milling machine has the following open-loop transfer function: (s 1)(s+3) Draw a block diagram describing a negative feedback system that includes a plant a) with transfer function of Gi(s) and a cascade proportional controller with a gain of K. b) Write the closed-loop transfer function for such a negative feedback system c The plant has poles that are solutions to P(s) 0 and zeros that are the solutions to Z(s)-0. Write an equation involving K, P(s) and Z(s)...
 Consider a unity feedback control architecture where P(s) =
1/s^2 and C(s) = K * ((s + z)/(s + p)) . It is desired to design
the controller to place the dominant closed-loop poles at sd = −2 ±
2j. Fix the pole of the compensator at −20 rad/sec and use root
locus techniques to find values of z and K to place the closed–loop
poles at sd .
Problem 4 (placing a zero) Consider a unity feedback control architecture...
Consider a unity feedback control architecture where P(s) =
1/s^2 and C(s) = K * ((s + z)/(s + p)) . It is desired to design
the controller to place the dominant closed-loop poles at sd = −2 ±
2j. Fix the pole of the compensator at −20 rad/sec and use root
locus techniques to find values of z and K to place the closed–loop
poles at sd .
Problem 4 (placing a zero) Consider a unity feedback control architecture...
 2. Controller Design For each of the following plants G, design a compensator G, so that the closed loop system KG, G (1 + KG, G has two dominant poles near 2 ± i Plot a root locus plot for the system before adding the compensator and another plot for after. Use the simplest G that you can find. Determine the gain K that will achieve the desired poles 142
2. Controller Design For each of the following plants G,...
2. Controller Design For each of the following plants G, design a compensator G, so that the closed loop system KG, G (1 + KG, G has two dominant poles near 2 ± i Plot a root locus plot for the system before adding the compensator and another plot for after. Use the simplest G that you can find. Determine the gain K that will achieve the desired poles 142
2. Controller Design For each of the following plants G,...
 4. A lead compensator with a transfer function Ge(s)=K(+0.5/(s+3) has been designed for a Space vehicle with the transfer function 1/s' such that at the dominant closed loop poles are located at -1 +/-j1. (0) What is the angle deficiency of the uncompensated system at the designed point provided by the location of the dominant poles? Show that the compensator provides the necessary lead angle at the designed point to satisfy the root locus angle criterion. What value of K...
4. A lead compensator with a transfer function Ge(s)=K(+0.5/(s+3) has been designed for a Space vehicle with the transfer function 1/s' such that at the dominant closed loop poles are located at -1 +/-j1. (0) What is the angle deficiency of the uncompensated system at the designed point provided by the location of the dominant poles? Show that the compensator provides the necessary lead angle at the designed point to satisfy the root locus angle criterion. What value of K...
 1. A system with unity feedback is shown below. The feed-forward transfer function is G(s). Sketch the root locus for the variations in the values of pi. R(9)+ 66) 69? Fig. 1: Unity-feedback closed-loop system G(s)= 100 s(s+ p) 2. The following closed-loop systems in Fig. 2 and Fig. 3 are operating with a damping ratio of 0.866 (S =0.866). The system in Fig. 2 doesn't have a PI controller, while the one in Fig. 3 does. Gain Plant R(S)...
1. A system with unity feedback is shown below. The feed-forward transfer function is G(s). Sketch the root locus for the variations in the values of pi. R(9)+ 66) 69? Fig. 1: Unity-feedback closed-loop system G(s)= 100 s(s+ p) 2. The following closed-loop systems in Fig. 2 and Fig. 3 are operating with a damping ratio of 0.866 (S =0.866). The system in Fig. 2 doesn't have a PI controller, while the one in Fig. 3 does. Gain Plant R(S)...
 only b and c please
1 Consider the system whose transfer function is given by: G(S) == (2s +1)(s+3) unction is given by: G(s) - (a) Use the root-locus design methodology to design a lead compensator that will provide a closed-loop damping 5 =0.4 and a natural frequency on =9 rad/sec. The general transfer function for lead compensation is given by D(5)=K (977), p>z, 2=2 (b) Use MATLAB to plot the root locus of the feed-forward transfer function, D(s)*G(s), and...
only b and c please
1 Consider the system whose transfer function is given by: G(S) == (2s +1)(s+3) unction is given by: G(s) - (a) Use the root-locus design methodology to design a lead compensator that will provide a closed-loop damping 5 =0.4 and a natural frequency on =9 rad/sec. The general transfer function for lead compensation is given by D(5)=K (977), p>z, 2=2 (b) Use MATLAB to plot the root locus of the feed-forward transfer function, D(s)*G(s), and...
 D9.2 Design a state-feedback controller for the following systems. Determine the controller gains, open-loop transfer functions, and closed-loop transfer functions Use the open-loop transfer functions to obtain root locus, Bode plots, and gain and phase margins LU u=-kx + r Closed-loop poles at s --1tj 2
D9.2 Design a state-feedback controller for the following systems. Determine the controller gains, open-loop transfer functions, and closed-loop transfer functions Use the open-loop transfer functions to obtain root locus, Bode plots, and gain and phase margins LU u=-kx + r Closed-loop poles at s --1tj 2
Most questions answered within 3 hours.
-
You dissolve 1.0 mole of a substance in water to a total volume
of 1,000 ml....
asked 3 minutes ago -
A company's total assets at the end of last year were 500,000
and its EBIT was...
asked 8 minutes ago -
Is it redundant to say that a pure substance is homogeneous, or
can it not be...
asked 12 minutes ago -
Already famous by the time he arrived at Princeton University in
1933, Einstein had suggested a...
asked 31 minutes ago -
Suppose the average male brain weight (in grams) is estimated to
be 13201320 grams. A 1905...
asked 39 minutes ago -
For each molecular substance (a) H3PO2 and (b) C6H5NH2,
calculate its molecular mass and write a...
asked 32 minutes ago -
The inheritance of color blindness in humans is due to a
recessive gene located on the...
asked 36 minutes ago -
Aqueous sulfuric acid (H2SO4) reacts with solid sodium hydroxide
(NaOH) to produce aqueous sodium sulfate (Na2SO4)...
asked 37 minutes ago -
QUESTION 25:
Find the pure binary representation of the following decimal
value: You DO NOT need...
asked 40 minutes ago -
The English mathematician John Kerrich tossed a coin
10,000 times and obtained 5067 heads.
a. calculate...
asked 1 hour ago -
13. Use the Student's t-distribution to find the t-value for
each of the given scenarios. Round...
asked 1 hour ago -
Explain the nutrition assessment for the lower gastrointestinal
tract, including the components of client history, anthropometric...
asked 59 minutes ago