The robot shown has four degrees of rotational freedom, namely, arm OA rotates about the x...
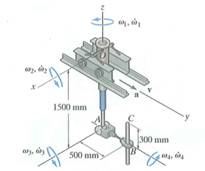
The robot shown has four degrees of rotational freedom, namely, arm OA rotates about the x and z axes, arm AB rotates about the x axis, and CB rotates about the y axis. At the instant shown, ω2 = 1.5 rad/s, ώ2 = 1 rad/s2, ω3 = 3 rad/s, ώ3 = 0.5 rad/s2, ω4 = 6 rad/s, ώ4 = 3 rad/s2, and ω1, = ώ2 = 0. If the robot does not translate, i.e., v = a = 0, determine the velocity and acceleration of point C at this instant.
Step-by-Step Solution
Request Professional Solution
Request Solution!
We need at least 10 more requests to produce the solution.
0 / 10 have requested this problem solution
The more requests, the faster the answer.
All students who have requested the solution will be notified once they are available.
Add your Solution
Textbook Solutions and Answers Search
ADVERTISEMENT
Need Online Homework Help?
Ask
a QuestionGet Answers For Free
Most questions answered within 3 hours.
Most questions answered within 3 hours.
ADVERTISEMENT
Recent Solutions
-
Calculating the space time for parallel reactions. m-Xylene is reacted over a ZSM-5 zeolit...
-
Determine Vo and ID for the networks of Fig. 2.160.FIG. 2.160
-
The truck travels along a circular road that has a radius of 50 m at a speed of 4 m/s. F...
-
A state legislature enacted a statute that required any motorcycle operator or passenger...
-
A 1024 × 1024 8-bit image with 5.3 bits/pixel entropy [computed from its histogram using E...
-
In Problem 3.3, we estimated the equationwhere we now report standard errors along with th...
-
In each of the following cases, deduce the nature of the light that is consistent with the...
-
Solve Example 20.5 such that the x, y, z axes move with curvilinear translation, Ω = 0 in...
-
In Fig. 6.43, if i = cos 4t and v = sin 4t, the element is:(a)a resistor(b) a capacitor(c)...
-
Sketch vo for each network of Fig. 2.181 for the input shown.FIG. 2.181
-
(Supplement B) Computing and Reporting Cash Flow Effectsof Sale of Plant and EquipmentDuri...
-
A 350-mL spherical flask contains 0.075 mol of an ideal gas at a temperature of 293 K. Wha...